1.本实用新型涉及无人机技术领域,具体涉及一种无人机。
背景技术:
2.近几年,伴随着无人驾驶飞机技术的逐渐成熟,以及配套控制设备的进步具备了技术上的多种应用的可行性。目前,无人机按照结构可以分为有多种类型,起降形式区分主要分为垂直起降和需要跑道或弹射起飞两种。垂直起降是飞机不需要滑跑就可以起飞和着陆的技术,从50年代末期开始发展。垂直起降技术的诞生主要是因为飞机滑跑起飞方式的不足,特别是在历次战争中的表现,让飞机的垂直起降进入人们的视线。垂直起降飞机减少或基本摆脱了对跑道的依赖,只需要很小的平地就可以拔地而起和垂直着陆,所以在战争中飞机可以分散配置,便于灵活出击、转移和伪装隐蔽,不易被敌方发现,出勤率也大幅提高,并且对敌方的打击具有很高的突然性,大大提高了飞机的战场生存率。
3.复合式无人机又称垂直起降固定翼无人机,既具备多旋翼垂直起降的优点,同时又具备固定翼的高效率、长航时航程等优势,具有许多的应用场景。目前随着复合式无人机的兴起,在工程上开始广泛使用,实际应用场景对其航程航时及便携性提出了新的要求。但现有技术中无人机在装箱时需要拆解大量部件,而在组合无人机时,又需要对大量部件进行组合,降低了无人机拆卸效率,无人机可靠性低。
4.但现有技术中无人机的拆卸效率低、可靠性低。
技术实现要素:
5.本实用新型提供一种无人机,旨在解决现有技术中无人机的拆卸效率低、可靠性低的问题。
6.为解决以上技术问题,本实用新型提供一种无人机,所述无人机包括机体、至少两个固定翼和至少两个机臂;
7.所述至少两个机臂分别固定于所述机体的两端,所述至少两个机臂分别位于所述机体的纵向轴线的两侧,所述机臂上设置有多个第一动力装置,所述第一动力装置用于提供动力;
8.所述至少两个固定翼分别位于所述机体的所述纵向轴线的两侧,所述机臂与所述机体的纵向轴线平行,所述至少两个固定翼分别可拆卸连接于所述机体的两端;所述无人机包括连接件,所述连接件的一端连接于所述机臂,所述连接件的另一端连接于所述机体的一侧。
9.其中,所述机体包括在所述纵向轴线上依次排布的机头、机身以及机尾,所述至少两个机臂分别固定于所述机身的两端,所述固定翼分别可拆卸连接于所述机身的两端。
10.其中,所述机头远离所述机尾的一端设有第二动力装置,所述第二动力装置用于提供牵引所述机体沿所述纵向轴线前进的动力;
11.和/或,所述机尾远离所述机头的一端设有第三动力装置,所述第三动力装置用于
提供推动所述机体沿所述纵向轴线前进的动力。
12.其中,所述第二动力装置包括第二电机和第二螺旋桨,所述第二电机的底座固定于所述机头的一端,所述第二电机的输出端连接于所述第二螺旋桨,所述第二螺旋桨的旋转轴平行于所述纵向轴线;
13.所述第三动力装置包括第三电机和第三螺旋桨,所述第三电机的底座固定于所述机尾的一端,所述第三电机的输出端连接于所述第三螺旋桨,所述第三螺旋桨的旋转轴平行于所述纵向轴线。
14.其中,所述机身包括在所述纵向轴线上依次排布的第一货仓、电池以及第二货仓;所述第一货仓和所述第二货仓用于装载货物;所述第一货仓、所述第二货仓以及所述电池位于所述机身内部,所述电池位于所述第一货仓和所述第二货仓之间。
15.其中,所述无人机包括第一尾翼,所述第一尾翼的一端连接于所述机臂,所述第一尾翼的另一端连接于所述机尾的一侧。
16.其中,所述至少两个固定翼和所述机身翼身融合;所述机身的底部设置有起落架。
17.其中,所述第一动力装置包括第一电机和第一螺旋桨,所述第一电机的底座固定于所述机臂的底部,所述第一电机的输出端连接于所述第一螺旋桨,所述第一螺旋桨的旋转轴垂直于所述纵向轴线。
18.其中,每个所述机臂包括多个所述第一动力装置,多个所述第一动力装置在所述机臂上间隔设置,同一所述机臂上多个所述第一动力装置关于所述机体的横向轴线对称设置。
19.其中,所述机臂的顶部设有第二尾翼,所述第二尾翼的一端固定于所述机臂的顶部。
20.本实用新型提供一种无人机,该无人机包括机体、至少两个固定翼和至少两个机臂;至少两个机臂分别固定于机体的两端,至少两个机臂分别位于机体的纵向轴线的两侧,机臂上设置有多个第一动力装置,第一动力装置用于提供动力;至少两个固定翼分别位于机体的纵向轴线的两侧,机臂与机体的纵向轴线平行,至少两个固定翼分别可拆卸连接于机体的两端;无人机包括连接件,连接件的一端连接于机臂,连接件的另一端连接于机体的一侧。本实用新型无人机在拆卸掉至少两个固定翼时,机臂所在位置即为无人机的两侧边缘,此时拆卸掉固定翼的无人机为一个边缘平整的结构,横向宽度相对未拆卸的无人机显著减小,可以很方便的装入标准集装箱内,由于仅拆卸固定翼即可将无人机装入标准集装箱内,能够提高无人机的拆卸效率和可靠性;进一步的,通过连接件连接机臂和机体,加强机臂和机体的连接,可以提高无人机的整体稳定性。
附图说明
21.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
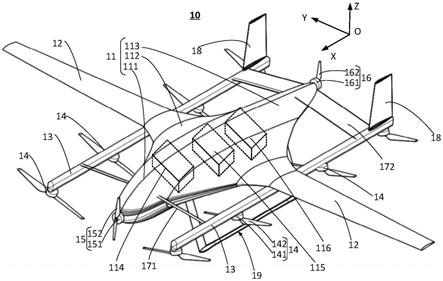
22.图1是本实用新型实施例所提供的无人机一实施例的整体结构示意图;
23.图2是本实用新型实施例所提供的无人机一实施例的右视结构示意图;
24.图3是本实用新型实施例所提供的无人机一实施例的后视结构示意图;
25.图4是本实用新型实施例所提供的无人机一实施例拆卸固定翼后的整体结构示意图;
26.图5是本实用新型实施例所提供的无人机一实施例拆卸固定翼后的俯视结构示意图。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.在本实用新型中,“示例性”一词用来表示“用作例子、例证或说明”。本实用新型中被描述为“示例性”的任何实施例不一定被解释为比其它实施例更优选或更具优势。为了使本领域任何技术人员能够实现和使用本实用新型,给出了以下描述。在以下描述中,为了解释的目的而列出了细节。应当明白的是,本领域普通技术人员可以认识到,在不使用这些特定细节的情况下也可以实现本实用新型。在其它实例中,不会对公知的结构和过程进行详细阐述,以避免不必要的细节使本实用新型的描述变得晦涩。因此,本实用新型并非旨在限于所示的实施例,而是与符合本实用新型所公开的原理和特征的最广范围相一致。
30.本实用新型实施例提供一种无人机。以下进行详细说明。
31.首先,本实用新型实施例中提供一种无人机,该无人机包括机体、至少两个固定翼和至少两个机臂;至少两个机臂分别固定于机体的两端,至少两个机臂分别位于机体的纵向轴线的两侧,机臂上设置有多个第一动力装置,第一动力装置用于提供动力;至少两个固定翼分别位于机体的纵向轴线的两侧,机臂与机体的纵向轴线平行,至少两个固定翼分别可拆卸连接于机体的两端;无人机包括连接件,连接件的一端连接于机臂,连接件的另一端连接于机体的一侧。
32.参阅图1
‑
5,图1是本实用新型实施例所提供的无人机一实施例的整体结构示意图;图2是本实用新型实施例所提供的无人机一实施例的右视结构示意图;
33.图3是本实用新型实施例所提供的无人机一实施例的后视结构示意图;图4是本实用新型实施例所提供的无人机一实施例拆卸固定翼后的整体结构示意图;图 5是本实用新型实施例所提供的无人机一实施例拆卸固定翼后的俯视结构示意图。
34.为了便于后续描述,本实用新型先引入机体坐标系,机体坐标系是指固定在无人
机上的遵循右手法则的三维正交直角坐标系,其原点位于无人机的质心。ox轴位于无人机飞行参考平面内平行于纵向轴线并指向飞行器前方,oy 轴垂直于飞行参考平面并指向无人机右方,oz轴在飞行参考平面内垂直于 xoy平面,指向无人机下方。当然,在其他实施例中,可根据实际需求定义机体坐标系,本实用新型对此不作限定。
35.根据以上定义,本实用新型中飞行参考平面为xoz,ox轴为纵向轴线, oy轴为横向轴线,oz轴为无人机垂直起降方向。
36.本实用新型实施例中,无人机10包括机体11、至少两个固定翼12和至少两个机臂13。至少两个机臂13分别固定于机体11的两端。至少两个机臂13分别位于机体11的纵向轴线ox的两侧,至少两个机臂13关于纵向轴线ox对称设置;至少两个固定翼12位于机体11的纵向轴线ox的两侧,至少两个固定翼12关于纵向轴线ox对称设置,有利于无人机10飞行稳定性。优选地,固定翼12的外轮廓为梯形。
37.本实用新型实施例中,机臂13上设置有多个第一动力装置14,第一动力装置14用于提供动力,机臂13与机体11的纵向轴线ox平行,固定翼12分别可拆卸连接于机体11的两端。其中,拆卸掉至少两个固定翼12的无人机10在竖向上的投影位于至少两个机臂13之间。机臂13为直线杆件,机臂13的截面可以是圆形、椭圆、方形等。优选地,机臂13的截面为椭圆面,由于机臂13主要承受竖向弯矩,设置机臂13截面为椭圆面,可以提高机臂13竖向受力性能的同时避免增加机臂13的尺寸。由于至少两个机臂13分别固定于机体11的两端,且至少两个机臂13与机体11的纵向轴线ox平行,固定翼12分别可拆卸连接于机体11的两端。当拆卸掉至少两个固定翼12时,机臂13所在位置即为无人机10的两侧边缘,此时拆卸掉固定翼12的无人机10为一个边缘平整的结构,横向宽度相对未拆卸的无人机10显著减小,可以不用再进行拆卸即可装入标准集装箱内,提高了无人机10的便携性,且减少存储成本。
38.进一步的,机臂13的一端端面为弧面或者锥面。例如,弧面为抛物面。将机臂13的一端端面为弧面或者锥面可以减小无人机10飞行时的阻力。
39.在一个具体的实施例中,第一动力装置14包括第一电机141和第一螺旋桨 142,第一电机141的底座固定于机臂13的底部,第一电机141的输出端连接于第一螺旋桨142,第一螺旋桨142的旋转轴垂直于纵向轴线ox。其中,第一电机141可以是步进电机或者伺服电机,根据具体情况选用即可。第一螺旋桨142 旋转提供向上的动力,驱动无人机10上升。
40.进一步的,每个机臂13包括多个第一动力装置14,多个第一动力装置14 在机臂13上间隔设置,同一机臂13上多个第一动力装置14关于机体11的横向轴线oy对称设置。多个第一动力装置14关于机体11的横向轴线oy对称设置,可以保持无人机10受力稳定。
41.优选地,每个机臂13包括偶数数量的多个第一动力装置14,第一动力装置 14数量为偶数,可以不在固定翼12下方安装第一动力装置14,避免第一动力装置14提供动力时影响固定翼12。例如,每个机臂13包括4个第一动力装置14。当然,可以根据具体情况设置第一动力装置14的数量,本技术对此不作限定。
42.本实用新型实施例中,机体11包括在纵向轴线ox上依次排布的机头111、机身112以及机尾113,至少两个机臂13分别固定于机身112的两端,固定翼12 分别可拆卸连接于机身112的两端。其中,机头111、机身112以及机尾113一体成型,当然,机头111、机身112以及机尾113也可以通过可拆卸方式连接。
43.本实用新型实施例中,机头111远离机尾113的一端设有第二动力装置15,第二动
力装置15用于提供牵引机体11沿纵向轴线ox前进的动力。机尾113远离机头111的一端设有第三动力装置16,第三动力装置16用于提供推动机体11沿纵向轴线ox前进的动力。在其他实施例中,也可以仅机头111远离机尾113的一端设有第二动力装置15;或者仅机尾113远离机头111的一端设有第三动力装置16。通过在机体11的前后两端均设置动力装置,一方面可以提高无人机10 的整体动力,另一方面可以在单个动力装置故障时,起到备份作用,无人机10 仍可安全受控降落,提升无人机10的可靠性和安全性。
44.本实用新型实施例中,第二动力装置15包括第二电机151和第二螺旋桨 152,第二电机151的底座固定于机尾113的一端,第二电机151的输出端连接于第二螺旋桨152,第二螺旋桨152的旋转轴平行于纵向轴线ox。第三动力装置 16包括第三电机161和第三螺旋桨162,第三电机161的底座固定于机头111的一端,第三电机161的输出端连接于第三螺旋桨162,第三螺旋桨162的旋转轴平行于纵向轴线ox。
45.本实用新型实施例中,无人机10包括连接件171,连接件171的一端连接于机臂13,连接件171的另一端连接于机体11的一侧。具体的,连接件171的一端连接于机臂13,连接件171的另一端连接于机头111的一侧。具体的,无人机10 包括两个连接件171,两个连接件171对称设置在机头111的两侧。进一步的,连接件171为圆柱杆,连接件171垂直于机臂13。通过连接件171连接机臂13和机头111,加强机臂13和机头111的连接,提高无人机10的整体稳定性。
46.进一步的,无人机10包括第一尾翼172,第一尾翼172的一端连接于机臂13,第一尾翼172的另一端连接于机尾113的一侧。具体的,无人机10包括两个第一尾翼172,两个第一尾翼172对称设置在机尾113的两侧。进一步的,第一尾翼 172为条形板。机臂13前段使用连接件171与机头111相连,机臂13后段使用第一尾翼172与机尾113相连,因此机臂13与机头111、机身112以及机尾113分别相连,形成盒式结构,加强机臂13的承载能力。
47.进一步的,两个固定翼12和机身112翼身融合。翼身融合(blended wingbody,缩写bwb,亦称翼身合一、翼胴融合、翼胴合一),是一种飞机设计概念。顾名思义,它将机身112与固定翼12结构融合,变成类似飞行翼的外型。这可使无人机10的升力以及燃油效率提升。
48.进一步的,机身112的底部设置有起落架19。具体的,起落架19包括至少三条支撑杆192,支撑杆192的一端连接于机身112底部,支撑杆192的另一端用于支撑于底面。优选地,起落架19包括四条支撑杆192,四条支撑杆192的另一端为矩形的四个端点,四条支撑杆192关于飞行参考平面xoz对称,位于飞行参考平面xoz同侧的两条支撑杆192之间通过连接杆191连接。进一步的,连接杆191为圆柱杆,连接杆191上套设有缓冲套,缓冲套可以是塑料、橡胶等材料制备而成。
49.进一步的,机臂13的顶部设有第二尾翼18,第二尾翼18的一端固定于机臂 13的顶部。具体的,第二尾翼18为垂直尾翼。垂直尾翼简称垂尾,起保持飞机的航向平衡、稳定和操纵作用。第二尾翼18的外轮廓为梯形。在其他实施例中,机臂13的顶部可设置v型尾翼。
50.本技术实施例中,机身112包括在纵向轴线ox上依次排布的第一货仓114、电池115以及第二货仓116。第一货仓114和第二货仓116用于装载货物。第一货仓114和第二货仓116与电池115均位于机身112内部,电池115放置于第一货仓 114和第二货仓116中间,可使电池115位于无人机10的质心位置附近。电池115 由多个电池包组成,当无人机10由最远航程状态切换至最大载货状态时,需要将一块或者多块电池包取下,从而达到最大载重量。这种
方案可以保证在最远航程状态及最大载货状态之间切换时,整机重心不会偏移,保证多种状态切换的可行性。
51.通过对无人机10的尺寸进行合理设计,无人机10在业务运营时,当天结束后均需要进行存储。本实用新型的无人机10仅需通过拆卸无人机10两侧固定翼 12,剩余部件的存储尺寸将在5000mm*2200mm*1500mm以内,小于20'gp标准集装箱的内尺寸:5898mm(长)x2352mm(宽)x2393mm(高),最大程度减少存储成本。而仅需拆卸两侧机翼则可以减少运营前作业准备时间及运营效率,也可以通过避免其他部件的反复拆卸从而提升整机可靠性。
52.本实用新型提供一种无人机,该无人机包括机体、至少两个固定翼和至少两个机臂;至少两个机臂分别固定于机体的两端,至少两个机臂分别位于机体的纵向轴线的两侧,机臂上设置有多个第一动力装置,第一动力装置用于提供动力;至少两个固定翼分别位于机体的纵向轴线的两侧,机臂与机体的纵向轴线平行,至少两个固定翼分别可拆卸连接于机体的两端;无人机包括连接件,连接件的一端连接于机臂,连接件的另一端连接于机体的一侧。本实用新型无人机在拆卸掉至少两个固定翼时,机臂所在位置即为无人机的两侧边缘,此时拆卸掉固定翼的无人机为一个边缘平整的结构,横向宽度相对未拆卸的无人机显著减小,可以很方便的装入标准集装箱内,由于仅拆卸固定翼即可将无人机装入标准集装箱内,能够提高无人机的拆卸效率和可靠性;进一步的,通过连接件连接机臂和机体,加强机臂和机体的连接,可以提高无人机的整体稳定性。
53.以上对本实用新型实施例所提供的一种无人机进行了详细介绍,本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。