1.本技术涉及飞行器技术领域,尤其是涉及一种水空两用无人机。
背景技术:
2.无人机主要通过无线传感技术利用地面控制器对其进行控制。随着无人机技术的不断发展,无人机从最开始的军用领域现在已经扩展至民用领域。
3.相关技术中,公告号为cn111268123a公开了一种可用于水陆两栖降落无人机,其包括主体,移动槽,底槽,安装孔,移动板和移动块;主体包括有辅助件,内槽,导向板;主体的外侧为楔形结构,且主体的两侧设有弧形结构的辅助件;主体的内部设有矩形结构的内槽,且内槽的外侧顶端设有矩形结构的导向板;主体为矩形板状结构,且主体呈对应安装方式与无人机的底部相连接;移动槽设在内槽内部中间位置,且移动槽的底端处于主体的底部;底槽通过均匀排列的方式设在主体的底部;安装孔设在主体的两端外侧;移动板后端的弹簧嵌入在内孔的内部,且移动板的导向槽内部插入有导向板;移动块安装在移动槽的内部,且移动块外侧的限位板嵌入在移动槽外侧的限位槽内部。
4.针对上述中的相关技术,发明人认为该无人机在水面上进行作业时,不便于在水面上行驶。
技术实现要素:
5.为了便于无人机在水面上行驶,本技术提供一种水空两用无人机。
6.本技术提供的一种水空两用无人机采用如下的技术方案:
7.一种水空两用无人机,包括无人机主体,所述无人机主体靠近地面的一侧设有浮力机构,所述无人机主体靠近浮力机构的一侧转动设置有螺旋桨,所述螺旋桨的平面高度低于浮力机构,所述螺旋桨水平设置,所述无人机主体中设有驱动螺旋桨转动的转动电机。
8.通过采用上述技术方案,当无人机主体放入水中时,通过浮力机构使得无人机主体不易沉入水中;且螺旋桨的平面高度低于浮力机构,使得螺旋桨处于水面下,然后打开转动电机,以使得螺旋桨旋转,从而螺旋桨为无人机主体提供在水面上前进的动力,进而达到无人机主体便于在水面上行驶目的。
9.可选的,所述无人机主体靠近螺旋桨的一侧设有导流罩,导流罩套设在螺旋桨外,所述导流罩的两端均设有开口。
10.通过采用上述技术方案,导流罩使得螺旋桨推动水面产生的空泡不易再次进入螺旋桨中,从而减少空泡对螺旋桨的转动产生干涉,进而螺旋桨不易发生空转现象。
11.可选的,所述导流罩的两端均设有防护网。
12.通过采用上述技术方案,防护网用于对水中的树枝、水草等杂物进行阻挡,以使得水中的杂物不易卷入螺旋桨中导致螺旋桨损坏。
13.可选的,所述浮力机构为圆台状,所述浮力机构的大端为靠近无人机主体的一端,所述浮力机构的小端靠近地面的一端。
14.通过采用上述技术方案,浮力机构的侧壁具有斜度,使得流体流经浮力机构时阻力更小,从而使得无人机主体在空中飞行或水中行驶的阻力更小,减少了无人机主体的耗能。
15.可选的,所述浮力机构包括气囊。
16.通过采用上述技术方案,气囊在水中产生的浮力较大,且水不易渗入气囊中,从而使得无人机主体降落在水面后不易下沉,且使得无人机主体的降落更加平稳。
17.可选的,所述无人机主体靠近螺旋桨的一侧设置有起落架,所述螺旋桨的平面高度高于起落架远离无人机主体一端的平面高度。
18.通过采用上述技术方案,当无人机主体下降在地面上时,起落架对无人机主体形成支撑,以使得无人机主体保持平稳;并且由于螺旋桨的平面高度高于起落架远离无人机主体一端的平面高度,使得起落架与地面相抵接,且螺旋桨不易与地面相接触,以达到保护螺旋桨的目的。
19.可选的,所述起落架靠近地面的一端设有支撑板。
20.通过采用上述技术方案,当无人机主体放入水中时,支撑板完全浸入水中;当无人机主体在水流的冲击下上下起伏时,支撑板跟随无人机主体上下起伏,由于水的张力使得水对支撑板形成反作用力,从而使得支撑板不易在水中上下起伏,进而使得无人机主体不易在水中倾倒。
21.可选的,所述支撑板远离地面的一侧可拆卸连接有配重块。
22.通过采用上述技术方案,可以在支撑板上按照水域情况配置相应重量的配重块,以便于调整无人机主体的吃水高度,从而使得无人机主体在水面上前行时不易倾倒。
23.可选的,所述支撑板远离地面的一侧设有卡座,配重块卡接在卡座上。
24.通过采用上述技术方案,将配重块通过卡座卡接在支撑板上,使得配重块不易从支撑板上滑落。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.螺旋桨的平面高度低于浮力机构,使得螺旋桨处于水面下,然后打开转动电机,以使得螺旋桨旋转,从而螺旋桨为无人机主体提供在水面上前进的动力,进而达到无人机主体便于在水面上进行作业的目的;
27.2.通过导流罩使得螺旋桨推动水面产生的空泡不易再次进入螺旋桨中,从而减少空泡对螺旋桨的转动产生干扰,进而使得螺旋桨不易发生空转现象;
28.3.通过防护网对水中的树枝、水草等杂物进行阻挡,以使得杂物不易被卷入螺旋桨中导致螺旋桨损坏。
附图说明
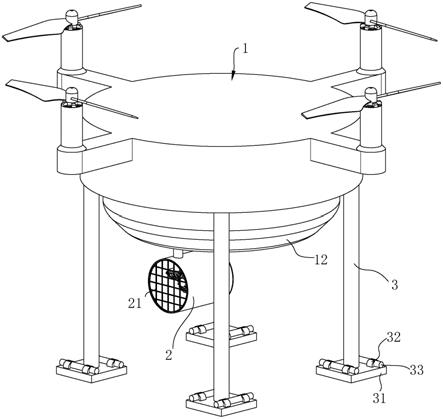
29.图1是本技术实施例水空两用无人机整体的结构示意图。
30.图2是本技术实施例水空两用无人机的剖视图。
31.图3是图2中a部的放大图。
32.附图标记说明:1、无人机主体;11、螺旋桨; 111、转动轴;1111、从动锥齿轮;12、气囊; 13、转动电机;131、输出端;1311、主动锥齿轮;2、导流罩;21、连接段;22、固定架;23、防护网;3、起落架;31、支撑板;32、卡座;33、配重块。
具体实施方式
33.以下结合附图1
‑
3对本技术作进一步详细说明。
34.本技术实施例公开一种水空两用无人机。参照图1与图2,一种水空两用无人机包括无人机主体1、浮力机构与螺旋桨11。
35.浮力机构设在无人机主体1靠近地面的一侧,浮力机构用于使无人机主体1在水面上漂浮。螺旋桨11设在无人机主体1靠近浮力机构的一侧,螺旋桨11用于使无人机主体1在水面上行驶。
36.参照图1,浮力机构包括气囊12。通过气囊12中的气体使得无人机主体1漂浮在水面上不易沉入水中。气囊12呈圆台状,气囊12的大端固定在无人机主体1靠近地面的一侧,气囊12的小端沿远离无人机主体1的方向设置。由于气囊12的侧壁具有一定斜度,使得气流或水流与气囊12接触时,气流或水流从气囊12的斜面朝无人机外侧排出,以减少气流或水流对无人机主体1运动时的阻力。浮力机构也可以设置为泡沫板,通过泡沫板对无人机主体1提供浮力。
37.参照图2与图3,无人机主体1靠近地面的一侧设有导流罩2。导流罩2为中空圆管,导流罩2水平设置,且导流罩2的侧壁和无人机主体1之间设有连接段21。连接段21的一端固定在导流罩2上,连接段21的另一端固定在无人机主体1上,以使得导流罩2固定在无人机主体1上。导流罩2中设有固定架22。螺旋桨11转动设置在导流罩2内,且螺旋桨11与导流罩2同轴设置。螺旋桨11上固定有转动轴111。转动轴111的一端固定在螺旋桨11上,转动轴111的另一端转动设置在固定架22上。
38.参照图2与图3,无人机主体1中设有转动电机13,转动电机13的输出端131位于转动电机13靠近导流罩2的一侧,且输出端131与导流罩2的轴线相垂直。输出端131靠近导流罩2的一端设有主动锥齿轮1311,转动轴111远离螺旋桨11的一端设有从动锥齿轮1111。通过主动锥齿轮1311与从动锥齿轮1111相互啮合,使得输出端131与转动轴111传动连接。转动电机13启动后,输出端131带动转动轴111转动,转动轴111带动螺旋桨11转动,从而使得螺旋桨11推动水流使无人机主体1进行行驶。导流罩2套设在螺旋桨11上,使得螺旋桨11推动水流产生的空泡不易再次进入螺旋桨11中,从而减少空泡对螺旋桨11转动时产生干扰,进而使得螺旋桨11不易出现空转现象。
39.参照图1与图2,导流罩2两端的端部上均设有防护网23。防护网23的形状与导流罩2横截面形状相同,且防护网23的侧壁固定在导流罩2的内侧壁上。防护网23上设有滤孔。防护网23对水中大于滤孔大小的杂物进行阻挡,从而使得螺旋桨11不易将水草或垃圾卷入致使螺旋桨11损坏。
40.参照图1,无人机主体1靠近地面的一侧固定有起落架3。无人机主体1降落在地面时,起落架3用于对无人机主体1形成支撑,以使得无人机主体1不易倾倒。导流罩2的平面高度高于起落架3远离无人机主体1一端的平面高度,使得螺旋桨11远离地面,以达到保护螺旋桨11的目的。
41.起落架3靠近地面的一端固定有支撑板31。支撑板31为矩形板,支撑板31水平设置。无人机主体1放入水中,由于起落架3低端的平面高度低于导流罩2的平面高度,使得支撑板31完全浸入水中。当无人机主体1在水流的冲击下翘起时,由于水具有张力使得水对支撑板31形成反作用力,从而使得支撑板31不易与水面分离,进而使得无人机主体1不易在水
流的冲击下倾倒。
42.支撑板31远离地面的一侧设有两组卡座32。每组卡座32上均卡接有配重块33。可以在支撑板31上按照水域情况在卡座32上配置相应重量的配重块33,以便于调整无人机主体1的吃水高度,从而使得无人机主体1在水面上前行时不易倾倒;当无人机主体1需要飞行时,可以从卡座32上取下配重块33,即可减轻无人机主体1的重力,使得配重块33不易影响无人机主体1飞行。在其他实施方式中,可以在支撑板31上设置通孔,在配重块33上设置挂钩,通过挂钩挂接在支撑板31的通孔处,从而达到配重块33可拆卸连接在支撑板31上的目的。
43.本技术实施例一种水空两用无人机的实施原理为:当无人机主体1需在水中进行作业时,可以先将无人机主体1放入水中,通过气囊12使得无人机主体1漂浮在水中,观察无人机主体1在水中是否漂浮稳定,若较为摇晃可以在支撑板31上通过卡座32卡接配重块33,使得无人机主体1的吃水高度提升,以使得无人机主体1在水面上不易倾倒。
44.然后将转动电机13打开,输出端131带动转动轴111转动,转动轴111带动螺旋桨11进行转动,从而推动无人机主体1在水面上行驶。螺旋桨11在水中转动时,通过导流罩2使得螺旋桨11转动产生的空泡不易再次经过螺旋桨11,以使得螺旋桨不易出现空转现象;防护网23使得水中大于滤孔大小的杂物不易被卷入螺旋桨11中,致使螺旋桨11损坏。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。