1.本发明涉及一种无人飞行器技术领域,特别涉及一种可空中自主释放回收的子母式无人飞行器的收放装置。
背景技术:
2.由于无人机具有受路况影响小、方便灵活等特点,目前小型无人机在航空摄影、灾害救援、电力巡检、环保检测、交通监视、侦查打击等军用和民用领域都有着重要作用。然而,小型无人机由于其自身航程近、续航时间短、载重能力差等特点,实际应用中受到许多局限。为拓展小型无人机作业应用半径,延长小型无人机作业时间,增强小型无人机任务可靠性,同时降低系统成本,提出一种用于空中自主释放回收的多层子母式无人飞行器的收放平台装置。单个大型无人母机利用收放平台装置携带多架子机,运送子机到达任务场景执行任务后,又由收放平台回收子机。
3.子母式无人机收放装置早在上个世纪就有研究,美国dc
‑
130、捕食者等利用机翼下的收放装置携带无人机;直11在起落架上添加收放机构,携带“sw6”执行任务。中国专利,公开号为cn112061414a的《一种无人机集群投放装置、空中集群投放系统及无人机》中提出了一种无人机集群投放装置,该装置主要包括运载机构和承托件,运载机构带动承托件向上或向下运动,到达指定位置后释放无人机。
4.现有的子母式无人机收放装置多采用投放式释放,子机挂载在母机机翼下或是藏于机腹中,可以实现子机快速安全的释放。固定翼或多旋翼式的母机由于其飞行能力的不同,收放装置也大不一样。固定翼的子母式无人机飞行速度快,难以做到精准同速下的协同回收,一般只考虑子机的释放;多旋翼式的子母式无人机可以实现空中悬停具有回收的条件。
5.固定翼式的收放装置不考虑回收问题,由于子机负载有限,导致其不具备长时间续航能力,执行任务后子机往往由于能源耗尽而无法回收,造成成本的浪费。多旋翼式的收放装置,如中国专利,公开号为cn112061414a的《一种无人机集群投放装置、空中集群投放系统及无人机》中也只考虑了子机的释放过程,未将回收过程考虑在内,同时由于其采用双传动装置,对传动的同步性提出了很高的要求,论文《toward autonomous in
‑
flight docking of unmanned multi
‑
rotor aerial vehicles》中提出的收放装置只能够实现一架子机的释放与回收,未考虑多架子机的释放回收问题。
6.因此,提供一种多层结构的子母式无人机收放装置,以便能够实现多架子机的释放回收,减少子母式无人机系统成本,提高系统的可行性。
技术实现要素:
7.本发明提供一种具备多架子机释放与回收的新型子母式无人机收放装置,能够做到空中自主释放与回收多架子机。
8.一种多层子母式无人飞行器收放装置,包括安装平台、升降装置、至少两层卷帘机
构,所述升降装置安装于所述安装平台,所述升降装置带动所述卷帘机构实现垂直升降,所述至少两层卷帘机构从上至下依次关闭,实现子机的释放;所述至少两层卷帘机构从下至上依次展开,实现子机的回收。
9.所述安装平台包括上底板、下底板、四根带有滑槽的立柱,所述卷帘机构与所述滑槽配合实现所述卷帘机构的升降。
10.所述升降装置包括齿条、减速齿轮、电机,所述齿条安装于所述上底板与所述下底板之间,所述电机与所述减速齿轮链接,所述减速齿轮与所述齿条啮合。升降装置依靠齿轮齿条装置实现整个卷帘机构的升降移动,释放时下层向上层移动,上层卷帘收起,避免遮挡下层子机,并可以尽可能减少由母机腔体带来的气流扰动等因素的影响,实现子机快速安全的起飞。进一步的,回收时,上层卷帘关闭,下层卷帘展开,利用子机下视镜头识别视觉标志物实现降落,每回收一架子机就将该层卷帘向下移动,如此循环,实现回收放置过程。
11.所述卷帘机构包括底座、横梁、柔性材料、滑轮、承重梁、软绳、驱动电机、减速齿轮组,所述底座通过四角滑块与所述立柱的滑槽配合,所述底座两端设置横梁,所述横梁通过滑轮与底座固接,减速齿轮组与驱动电机相互啮合,安装在横梁的一端,所述底座两侧设置有导轨,所述承重梁安装在所述导轨中,所述柔性材料覆盖在承重梁上,所述软绳通过所述承重梁两端的孔连接所有承重梁,所述软绳的两端固结在横梁的绞盘上,使得承重梁沿所述导轨自由滑动。所述导轨两端为喇叭口状。所述柔性材料上表明喷涂有视觉标志物。利用电机旋转带动卷帘运动,使得卷帘能够收起或展开,展开时可以实现子机着陆,通过承重梁支撑子机的重量,由于卷帘平面采用柔性材料制作,并且承重梁为分散布置,故在子机降落到柔性材料上时可以提供额外的缓冲,保证降落的安全;由于卷帘平面是柔性材料,在电机转动时可以将卷帘缠绕在横杆上,从而可以使得下一层子机顺利起飞,使其能具有多架子机释放回收能力。进一步的,回收时,利用子机上携带的下视相机识别柔性材料上喷涂的视觉标志物,实现视觉辅助定位回收过程。
12.一种无人飞行器空中自主收放系统,包括母机和上述多层子母式无人飞行器收放装置,并且,升降装置带动上层卷帘机构由下向上运动,在所述卷帘机构随所述升降装置向上运行至预定位置时,上层子机与所述卷帘机构脱离,释放所述子机;关闭上层卷帘机构,打开下层子机上飞通道;升降装置带动下层卷帘机构由下向上运动,在所述卷帘机构随所述升降装置向上运行至预定位置时,下层子机与所述卷帘机构脱离,释放所述子机;重复起飞过程,实现多架子机起飞;并且,展开下层卷帘机构,子机飞行到母机上方,识别视觉标志物,降落至所述卷帘机构上,升降装置带动所述卷帘机构向下运动至指定位置,回收所述子机;展开上层卷帘机构,打开上层子机降落通道;子机飞行到母机上方,识别视觉标志物,降落至所述卷帘机构上,升降装置带动所述卷帘机构向下运动至指定位置,回收所述子机;重复降落过程,实现多架子机回收。
13.本发明与现有技术相比所具有的有益效果:
14.1、收放装置通过卷帘机构,使得该装置能够同时实现子机的释放与回收两个过程,回收子机,增强了子母机系统的可行性,降低了系统的成本。通过在卷帘的柔性材料上喷涂标志物,在降落过程中,子机利用下视镜头可以识别视觉标志物降落,实现子机的回收,增加了子机降落精度。本发明利用卷帘以及标志物,可以实现子机的回收,增加了子母机系统的实用性。
15.2、多层卷帘机构使得装置具有收放多架子机的能力。释放子机时,上层卷帘机构关闭,下层子机即可起飞;回收时,下层卷帘首先展开,子机落下后,其上层卷帘再展开,如此实现多架子机的回收。本发明采用多层卷帘机构的方式,使其具有多架子机释放回收的能力,增加了子母机系统的完整性。
16.3、具有升降装置,每层卷帘机构配有相应的电机以及齿轮升降装置,可以让子机在起飞降落过程中,都处于靠近母机机身上部的位置,相较于其他设计,可以有效避免母机腔体带来的气流干扰作用,增加子机起飞的成功率,避免子机起飞飞行的不稳定。
附图说明
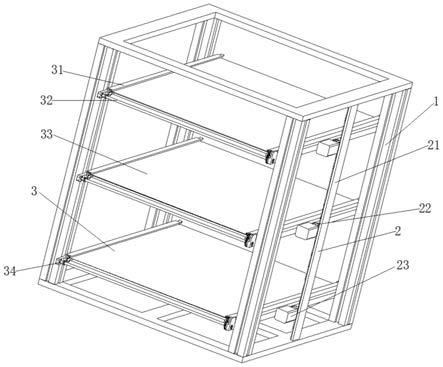
17.图1为收放装置释放首层子机示意图;
18.图2为收放装置回收首个子机示意图;
19.图3为卷帘机构展开图;
20.图4为卷帘机构关闭图;
21.其中,1
‑
安装平台、11
‑
上底板、12
‑
支柱、13
‑
下底板、2
‑
升降装置、21
‑
齿条、22
‑
齿轮、23
‑
电机、3
‑
卷帘装置、31
‑
底座、32
‑
横梁、33
‑
柔性材料、34
‑
滑轮、35
‑
承重梁、36
‑
软绳、37
‑
驱动电机一、38
‑
减速齿轮组一、39
‑
驱动电机二、40
‑
减速齿轮组二。
具体实施方式
22.一种具备多架子机释放与回收功能的收放装置,如图1所示,包括:安装平台1、升降装置2、卷帘机构3。安装平台包括上底板11、下底板13,以及四根带有滑槽的立柱12,滑槽与卷帘机构相互配合,作为卷帘机构运动的导轨。
23.升降装置2包括齿条21、减速齿轮22、电机23。齿条安装在上底板11与下底板13之间,每层卷帘上安装有对应升降的电机23与减速齿轮22,齿轮与齿条相互啮合。
24.卷帘机构3包括底座31、横梁32、柔性材料33、滑轮34、承重梁35、软绳36、驱动电机一37、减速齿轮组一38、驱动电机二39、减速齿轮组二40。底座31通过四角滑块与立柱12的导轨相配合,底座31上装有导轨,承重梁35安装在导轨中,导轨两端采用喇叭口平滑设计,使得承重梁35能够更容易的进入导轨;软绳36通过承重梁35两端的孔,将所有的承重梁35连接起来,软绳36两端穿过在横梁32绞盘上的小孔,固连在横梁32上,使得承重梁35可沿导轨自由滑动,柔性材料33覆盖在承重梁35上,底座31两端设置横梁32,横梁32两端固定在轴承34中,轴承34安装在底座31上,减速齿轮组一38与驱动电机一37相互啮合,安装在横梁32的一端,实现卷帘的展开,减速齿轮组二40与驱动电机二39相互啮合,安装在底座31另一端,实现卷帘收起。
25.本发明主要分为两个工作状态:释放状态、回收状态。
26.收放装置释放状态如图1所示。卷帘机构3处于展开状态,依靠柔性材料33与承重梁35组成的平台,支撑子机的重量,由电机23驱动减速齿轮22,带着上层卷帘机构3沿着齿条21上升到指定位置,然后锁死,上层子机即可起飞,这时利用驱动电机37带动软绳36缠绕在横梁32上,即可使得卷帘平台收放在一侧横梁32上,打开下层子机上飞通道,下层卷帘机构3,同样依靠升降装置2上升到合适的位置,重复起飞过程,实现多架子机起飞,同时在每层子机起飞前,将卷帘机构3尽可能上升到合适的高度,避免了母机腔体带来的气流干扰作
用,保证了子机起飞的成功率。
27.回收子机时转为回收状态,示意图如图2所示。回收首个子机时,最下层卷帘机构3处于展开状态,柔性材料33上喷涂有标志物,子机首先利用gps飞行到母机上方,然后利用下视相机识别标志物,通过控制程序降落在卷帘平台上,由于卷帘平台是由柔性材料33与若干承重梁35组成,所以具有良好的缓冲能力,可以保证子机降落到卷帘平台上不会出现反弹的现象,下层子机降落成功后,利用升降装置2,带动卷帘机构3向下运动到指定位置,上层卷帘机构3展开,重复降落过程。标志物的应用以及卷帘机构的实现,保证了本发明能够实现多架子机的回收。
28.以上所述仅为本发明的具体实施方式,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。