一种基于pvc凝胶驱动的抗荷服装置
技术领域
1.本发明属于智能材料与智能结构技术领域,具体涉及一种基于pvc凝胶驱动的抗荷服装置。
背景技术:
2.当飞行器作盘旋、斛斗、半斛斗翻转、半滚倒转、俯冲改出等机动或特技飞行时,飞行员的头朝向飞行曲线的圆心,受到由足指向头的向心加速度作用,而惯性离心力则以由头到骨盆(足)的方向作用于人体,这种加速度在航空医学上命名为“正加速度”。人体受持续性正加速度作用时,内脏器官视重增加,并沿惯性力的方向变形、移位;血液视重增加,引起血液柱流体静压差增大,又由于血管的可扩张性,血液会沿惯性力方向朝身体下部转移、积聚,严重会导致视觉机能障碍与意识丧失。
3.为防止这种现象发生,需要采用抗荷装备对飞行员进行正加速度防护,目前世界各国一般会采用抗荷服作为通用抗荷设备。抗荷服是模仿长颈鹿利用厚皮紧箍血管,限制血压突然升高的原理,通过向布置在体表的气囊充气或者绷紧服装面料,向人体下肢和腹部加压,减少超重对人体心血管系统的不良作用,以实现其抗荷效果。一般能提高人体1.2g~1.6g的正过载耐力。
4.但是,目前的抗荷装备基本为充气式结构,该结构特点决定了装备需要抗荷调压器来调节压力大小,而抗荷调压器存在过载响应时间,导致过载时抗荷装备充气调压时间滞后,不利于其抗荷性能的发挥。同时,充气式抗荷服结构复杂,穿脱不便。此外,充气加压时影响飞行员呼吸,舒适性较差,环境温度高时热负荷也大。在飞行器机动性能与续航能力的不断提高,飞行环境与任务的日益复杂的发展趋势下,这些问题都制约着抗荷服的进一步发展。
技术实现要素:
5.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于pvc凝胶驱动的抗荷服装置,具有响应速度快,结构简单,穿戴方便等特点。
6.本发明采用以下技术方案:
7.一种基于pvc凝胶驱动的抗荷服装置,包括抗荷服织物结构,抗荷服织物结构的内侧周向阵列布置有多个pvc凝胶驱动器,抗荷服织物结构内侧与人体接触处设置有体表压力传感器,体表压力传感器和多个pvc凝胶驱动器分别经电控模块与加速度传感器连接,通过电控模块控制pvc凝胶驱动器调节施加在体表的压力。
8.具体的,pvc凝胶驱动器包括从上至下依次层叠设置有pvc凝胶薄膜、阳极、pvc凝胶薄膜和阴极。
9.进一步的,pvc凝胶薄膜的厚度为60~200μm。
10.进一步的,pvc凝胶薄膜采用pvc粉末、塑化剂己二酸二丁酯和有机溶剂四氢呋喃混合制得,pvc粉末和塑化剂己二酸二丁酯的质量比为1:,pvc粉末的分子量大于等于
24000。
11.进一步的,阳极为网孔结构,丝径与孔径为1:,阳极的厚度为60~200μm。
12.进一步的,阴极为平面结构,阴极的厚度小于pvc凝胶薄膜厚度的十分之一。
13.具体的,pvc凝胶驱动器的厚度为8~20mm。
14.具体的,抗荷服织物结构为双层结构,内层为单向弹性透气的弹性布,外层为无弹布。
15.进一步的,弹性布与人体表面间隙小于1mm。
16.具体的,多个pvc凝胶驱动器在抗荷服织物结构的内侧均匀布置形成一个驱动器阵列,多个驱动器阵列间隔布置在抗荷服织物结构的内侧,多个驱动器阵列之间距离2~4cm,每个驱动器阵列中相邻pvc凝胶驱动器之间的距离为1~2cm。
17.与现有技术相比,本发明至少具有以下有益效果:
18.本发明一种基于pvc凝胶驱动的抗荷服装置,由加速度传感器探测加速度变化,输出电信号通过电控模块驱动抗荷服装置变形,驱动材料采用pvc凝胶,具有快速响应特性,整体响应时间小于1s。与传统气动抗荷服装置相比,响应滞后大大降低,安全性得到提高,抗荷服装置采用电控制模块配合加速度传感器和体表压力传感器加电控制,并可以根据不同情况进行调整,比如电控制模块既可以集成在抗荷服外套上,方便穿戴控制;也可以作为独立模块,使用时安装在飞行器上,由飞行器提供电力。与气动抗荷服装置相比,采用电驱动的抗荷服装置驱动方式简单,方便应用。
19.进一步的,pvc凝胶驱动器由pvc凝胶薄膜、网孔阳极和平面阴极层叠组成;pvc凝胶驱动器制作流程简单,整体为柔性结构,便于贴合人体表面,且驱动器各部分采用优化后的特征尺寸,保证了抗荷服装置的输出性能,可以达到基本的抗荷要求。
20.进一步的,驱动器工作电压与驱动器厚度相关,在此后厚度范围内可以有效降低驱动器工作所需的电压。
21.进一步的,pvc凝胶薄膜成分在此范围内时驱动器工作性能最好。
22.进一步的,网孔结构阳极为整体具有柔性但不可压缩的片状电极,可由平面电极阵列打孔或由导电纤维编织而成,网孔结构用于pvc吸附,阳极厚度与pvc凝胶厚度相适应时驱动效果最好。
23.进一步的,平面阴极与pvc凝胶粘接效果好可以提高驱动器的制备效率,厚度小于凝胶薄膜的十分之一可以降低驱动器总体厚度,提高驱动效果。
24.进一步的,凝胶驱动器厚度在此范围内可以保持较好的柔顺性,穿戴舒适并且工作效果最好。
25.进一步的,抗荷服织物结构为双层结构,外层为没有弹性的透气布料,内层为单向弹性透气布料,用于装配pvc凝胶驱动器和辅助压力施加;内外层布料选择具有阻燃、柔软、轻质等性能的材料。因此,抗荷服装置安全性和舒适性都有所保证。
26.进一步的,弹性布贴近人体表面时抗荷服能够产生良好的加压效果。
27.进一步的,多个pvc凝胶驱动器沿下肢表面周向在抗荷服外套内侧均匀布置形成一个驱动器阵列,抗荷服外套每部分布置有多个驱动器阵列。其中,下腹部部分驱动器阵列仅覆盖肚脐到耻骨部分,大腿与小腿部分驱动器阵列全部覆盖下肢表面,各部分连接部分不布置驱动器阵列。驱动器阵列根据不同人体部位的血液分布分别布置,提升抗荷效果,降
低抗荷服装置重量。
28.综上所述,本发明满足基本的抗荷要求,与传统气动抗荷服相比,响应时间大幅降低,结构简单,穿戴方便,同时舒适性和安全性也有所提高。
29.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
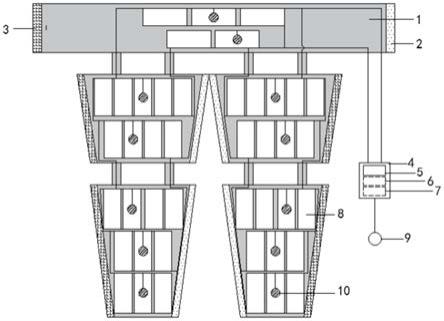
30.图1为抗荷服装置总体结构示意图;
31.图2为pvc凝胶驱动器示意图;
32.图3为抗荷服织物结构示意图;
33.图4为抗荷服装置穿戴示意图;
34.图5为抗荷服装置工作示意图。
35.其中:1.抗荷服织物结构;2.魔术贴母面;3.魔术贴公面;4.电控模块;5.人机交互界面;6.电源及变压电路;7.控制电路;8.pvc凝胶驱动器;9.加速度传感器;10.体表压力传感器;11.阳极;12.阴极;13.pvc凝胶薄膜;14.弹性布;15.无弹布。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“一侧”、“一端”、“一边”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
39.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
40.还应当理解,在本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
41.还应当进一步理解,在本发明说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
42.在附图中示出了根据本发明公开实施例的各种结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
43.pvc凝胶是一种最近发展起来的电活性聚合物,在电场作用下,pvc凝胶会向阳极方向蠕变,通过适当结构设计可通过pvc凝胶完成伸缩或者弯曲等形式的变形。pvc凝胶具有大应变(13%以上)、大应力(78kpa)、响应速度快(0.1s),驱动电压较低,质量轻、柔性好等优点,在可穿戴智能设备领域具有良好的应用前景。
44.请参阅图1和图5,本发明一种基于pvc凝胶驱动的抗荷服装置,包括抗荷服织物结构1、电控模块4、多个pvc凝胶驱动器8、加速度感器9、体表压力传感器10和电连接线等部分。
45.其中,多个pvc凝胶驱动器8周向阵列布置在抗荷服织物结构1的内侧;体表压力传感器10布置在抗荷服内侧与人体接触的表面;加速度传感器9用于感知实时加速度信号,并通过导线传送至电控模块4,加速度传感器9经电控模块4分别与体表压力传感器10和多个pvc凝胶驱动器8连接,电控模块4内设置有电压及变压电路6、控制电路7和人机交互界面5,控制电路7用于采集传感器信号并控制驱动器收缩加压,人机交互界面5用于监测体表压力,人工调节抗荷服加压,电压及变压电路6根据预设比例调节电压信号输出至pvc凝胶驱动器8调节施加在体表的压力,从而限制血液流动,减少加速度对血管系统的影响。
46.请参阅图2,pvc凝胶驱动器8包括网孔结构阳极11、平面阴极12和pvc凝胶薄膜13,网孔结构阳极11、平面阴极12和pvc凝胶薄膜13依次叠加组成pvc凝胶驱动器8,pvc凝胶驱动器8的总厚度为8~20mm。
47.pvc凝胶薄膜13的制备过程如下:
48.将pvc粉末、塑化剂己二酸二丁酯dba和有机溶剂四氢呋喃thf三种原料混合,pvc粉末完全溶解在混合物中后得到聚合物溶液用于制备pvc凝胶驱动器中的pvc凝胶薄膜13。pvc粉末和dba质量比为1:(4~9),pvc粉末分子量不小于24000,以获得较佳驱动性能。使用上述的聚合物溶液通过模具浇筑和涂布工艺制备pvc凝胶薄膜,聚合物溶液中的thf完全挥发后得到含有pvc和dba的pvc凝胶薄膜13,厚度为60~200μm。
49.pvc凝胶驱动器8中的网孔结构阳极11为整体具有柔性但不可压缩的片状电极,由平面电极阵列打孔或由导电纤维编织而成,厚度为60~200μm,丝径与孔径为1:(2~3);平面阴极12由与pvc凝胶具有良好粘接性能的材料制备而成,厚度应小于pvc凝胶薄膜13的十分之一。
50.pvc凝胶驱动器8的驱动电压为0~400v。
51.加速度传感器9用于检测飞行过程中加速度变化,为电控模块4提供输入信号用于调节驱动电压,可以集成在电控模块4中,也可采用飞行器本身采集的加速度信号用于替代。
52.体表压力传感器10布置在抗荷服装置的内侧,使用时贴紧人体表面,用于检测抗荷服装置提供的压力,并反馈给电控模块用于调节修正。
53.请参阅图3,抗荷服织物结构1为双层结构,内层为单向弹性透气的内层弹性布14,
外层为没有弹性的外层无弹布15,用于装配pvc凝胶驱动器8和辅助压力施加,内层的一侧设置有魔术贴母面2,外层的另一侧对应设置有魔术贴公面3;为了保证舒适性及安全性,内外层布料需要满足阻燃、柔软、轻质等要求,包括但不限于cvc阻燃面料、弹力阻燃面料、全棉阻燃面料、晴纶阻燃面料、芳纶阻燃面料等。
54.请参阅图4,抗荷服织物结构1为覆盖下腹部和下肢的可拆卸裤装,分为下腹部、大腿、小腿三部分,各部分均为开放式穿戴结构,可根据不同人体尺寸进行调节,调节方式包括但不限于每部分两侧布置的魔术贴母面2、魔术贴公面3或拉链等。
55.多个pvc凝胶驱动器8沿下肢表面周向在抗荷服织物结构1内侧均匀布置形成一个驱动器阵列,抗荷服织物结构1每部分布置有多个驱动器阵列;下腹部部分驱动器阵列仅覆盖肚脐到耻骨部分,大腿与小腿部分驱动器阵列全部覆盖下肢表面,各部分连接部分不布置驱动器阵列。
56.抗荷服织物结构抗荷服织物结构为覆盖下腹部和下肢的可拆卸裤装,分为下腹部、大腿、小腿三部分,各部分均为开放式穿戴结构,可根据不同人体尺寸进行调节,调节方式包括但不限于每部分两侧布置的魔术贴或拉链等。基于以上结构的抗荷服装置穿戴方便,并针对人体尺寸的差异性具有一定的适配能力。
57.电控模块4集成在抗荷服外套上,方便穿戴控制;也可以作为独立模块,使用时安装在飞行器上,由飞行器提供电力。
58.本发明一种基于pvc凝胶驱动的抗荷服装置在使用时,应贴紧人体表面,外套内侧与人体表面间隙应小于1mm,搭配高弹力裤用于绷紧下肢表面辅助穿戴。
59.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中的描述和所示的本发明实施例的组件可以通过各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.实施例1
61.首先制备pvc凝胶薄膜13,使用分子量为24000的pvc固体粉末,与塑化剂己二酸二丁酯dba按质量比1:4的比例混合,混合后其溶解在溶剂四氢呋喃thf中,混合物与四氢呋喃的质量比为1:3,得到聚合物溶液。
62.选择尺寸为20mm
×
20mm的正方形玻璃缸作为模具,清洗烘干后加入32g聚合物溶液,将玻璃缸放置在调平后的通风橱桌面上,使用滤纸盖住缸口。静置48小时,待溶剂完全挥发后,得到厚度为200μm的pvc凝胶薄膜13,并使用激光切割机切成50mm
×
100mm的长方形。
63.阳极11选择目数为80目的钢丝网,厚度为200μm,通过线切割将阳极11切成45mm
×
95mm的长方形,并将其中一个角切割为半径5mm的圆角。阴极12选择厚度为20μm的铜箔,使用激光切割机将其切割成与阳极尺寸形状相同的长方形。使用焊锡膏将电连接线焊接在长方形阴阳极圆角相对角处。
64.按照一层pvc凝胶薄膜13、一层阳极11、一层pvc凝胶薄膜13、一层阴极12的顺序,
将pvc凝胶薄膜13、阳极11、阴极12依次叠加20层,轻微压紧,使用聚酰亚胺胶带固定并使其边侧绝缘,总厚度8mm。
65.抗荷服织物结构1外层布料选择芳纶15,使用激光切割机对布料进行切割,其中腰部为110cm
×
15cm的长方形,大腿部分为长边68cm、短边59cm、高30cm的等腰梯形,小腿部分为长边48cm、短边39cm、高30cm的等腰梯形,另切割8条3cm
×
5cm的条状布料用作各部分之间的连接。内层布料选择氨纶14,使用激光切割机切成7cm
×
12cm的长方形。
66.腰部布置两列pvc凝胶驱动器8阵列,上列横向布置3个pvc凝胶驱动器8,下列横向布置2个pvc凝胶驱动器8;大腿部分布置两列驱动器阵列,上列纵向布置10个pvc凝胶驱动器8,下列纵向布置8个pvc凝胶驱动器8;小腿部分布置两列驱动器阵列,上列纵向布置6个pvc凝胶驱动器8,下列纵向布置4个pvc凝胶驱动器8。阵列之间距离4cm,pvc凝胶驱动器之间距离1cm。按照驱动器的布置将弹性布14缝制在无弹布15上,每部分两端分别加缝宽度20cm的魔术贴母面2和魔术贴公面3,并将各部分用条状布料连接起来。
67.将pvc凝胶驱动器8装配进内外层布料之间,并将各驱动器电连接线并联起来到阴阳极总线上,并使用绝缘涂料和绝缘布料将pvc凝胶驱动器8和电连接线裸露部分进行绝缘处理。将体表压力传感器10粘接在抗荷服织物结构1的内侧,将电源及变压电路6、控制电路7、加速度传感器9,人机交互界面5集成为电控模块4,通过电连接线与pvc凝胶驱动器8和体表压力传感器10连接。
68.使用时,加速度传感器9感知实时加速度信号,并通过导线传送至电控模块4,电源及变压电路6根据预设比例调节电压信号输出至pvc凝胶驱动器8调节施加在体表的压力,并由体表压力传感器10感知反馈到电控模块4,从而限制血液流动,减少加速度对血管系统的影响。
69.实施例2
70.首先制备pvc凝胶薄膜,使用分子量为27500的pvc固体粉末,与塑化剂己二酸二丁酯dba按质量比1:5的比例混合,混合后其溶解在溶剂四氢呋喃thf中,混合物与四氢呋喃的质量比为1:3,得到聚合物溶液。
71.将涂布机刮刀狭缝调节至60μm,设置涂布机工作速度为15mm/s,工作温度为20℃。使用涂布机将聚合物溶液均匀流延在离型纸光面上,待溶剂完全挥发后,得到厚度为58μm的pvc凝胶薄膜13,并使用激光切割机切成40mm
×
80mm的长方形。
72.阳极11选择目数为100目的镀镍的聚对苯二甲酸乙二醇酯pet网状织物,厚度为58μm,通过线切割将阳极切成35mm
×
75mm的长方形,并将其中一个角切割为半径5mm的圆角。阴极12选择厚度为7μm的铝箔,使用激光切割机将其切割成与阳极尺寸形状相同的长方形。使用焊锡膏将电连接线焊接在长方形阴阳极圆角相对角处。
73.按照一层pvc凝胶薄膜13、一层阳极11、一层pvc凝胶薄膜13、一层阴极12的顺序,将pvc凝胶薄膜13、阳极11、阴极12依次叠加50层,轻微压紧,使用聚酰亚胺胶带固定并使其边侧绝缘,总厚度10mm。
74.抗荷服织物结构1外层的无弹布15选择芳纶,使用激光切割机对布料进行切割,其中腰部为110cm
×
15cm的长方形,大腿部分为长边68cm、短边59cm、高30cm的等腰梯形,小腿部分为长边48cm、短边39cm、高30cm的等腰梯形,另切割8条3cm
×
5cm的条状布料用作各部分之间的连接。内层的弹性布14布料选择弹力阻燃面料,使用激光切割机切成多个长方形
相连的结构,其中长方形尺寸为4cm
×
10cm,预留出后续绝缘处理的缝制部分,连接处尺寸1cm
×
8cm。
75.腰部布置两列pvc凝胶驱动器8阵列,上列横向布置4个pvc凝胶驱动器8,下列横向布置3个pvc凝胶驱动器8;大腿部分布置三列驱动器阵列,上列纵向布置12个pvc凝胶驱动器8,下列纵向布置10个pvc凝胶驱动器8;小腿部分布置三列驱动器阵列,上列纵向布置8个pvc凝胶驱动器8,下列纵向布置6个pvc凝胶驱动器8。阵列之间距离2cm,驱动器之间距离1cm。按照驱动器的布置将内层布料14缝制在外层布料15上,每部分两端分别缝有拉链的魔术贴母面2、魔术贴公面3,并将各部分用条状布料连接起来。
76.将pvc凝胶驱动器8装配进内外层布料之间,并将各驱动器电连接线并联起来到阴阳极总线上,并使用绝缘涂料对驱动器和电连接线裸露部分进行绝缘处理,并将之前内层布料预留的部分缝制在外层布料上,使驱动器完全封装。将压力传感器10粘接在抗荷服织物结构内侧,将电源及变压电路6、控制电路7、加速度传感器9,人机交互界面5集成为电控模块,通过电连接线与pvc凝胶驱动器8和体表压力传感器10连接。
77.使用时,加速度传感器9感知实时加速度信号,并通过导线传送至电控模块4,电源及变压电路6根据预设比例调节电压信号输出至pvc凝胶驱动器8调节施加在体表的压力,并由体表压力传感器10感知反馈到电控模块4,从而限制血液流动,减少加速度对血管系统的影响。
78.综上所述,本发明一种基于pvc凝胶驱动的抗荷服装置,多个pvc凝胶驱动器以周向阵列布置在抗荷服织物结构内侧;体表压力传感器布置在抗荷服内侧与人体接触表面;加速度传感器感知实时加速度信号,并通过导线传送至控制器,电压及控制模块根据预设比例调节电压信号输出至pvc凝胶驱动器快速调节施加在体表的压力,从而在短时间内限制血液流动,减少加速度对血管系统的影响,有助于解决目前抗荷设备响应滞后、穿戴复杂、舒适性差的问题。
79.以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。