1.本发明涉及一种无人机外悬挂装置及使用方法,属于电力行业设备检修技术领域。
背景技术:
2.目前,超、特高压线路检修工作大量进行,检修人员爬塔、走线需要携带传递绳,然后在消缺作业点通过传递绳传递工具、材料,在检修人员攀爬几十米、上百米的高空过程中还需要携带沉重的传递绳,这样使作业人员的劳动强度大,而且增加了检修人员高空坠落的风险;在一些山区、水域上进行检修作业时,由于地形限制,不具备地面传递工具、材料的条件时,更增加了作业步骤与困难。
3.现有的一些无人机简易携带装置,只能实现物品的投放功能,不能实现物品收回功能或需要人员辅助钩挂才能对投放的物品进行回收,不能从根本上解决上述难题。
4.基于以上所述,亟需一种无人机外悬挂装置,主要实现无人机悬挂工具、材料飞至超、特高压输电线路的作业位置(杆塔、导线)并实现定点自动投放、收回的功能。
技术实现要素:
5.本发明所要解决的技术问题是提供一种实现定点自动投放、收回工具和材料,使用方便且性能可靠的无人机外悬挂装置及使用方法。
6.本发明采用如下技术方案:
7.本发明无人机外悬挂装置,其包括与无人机连接的悬吊装置以及安装在悬吊装置底部的用于携带工具和/或材料的承力装置;所述悬吊装置内安装用于与承力装置连接的驱动装置。
8.本发明无人机外悬挂装置,所述悬吊装置包括倒u形支撑框架、固定安装在u形支撑框架底部呈环状的电磁铁以及固定安装在u形支撑框架顶部与无人机连接的吊环,在所述电磁铁内壁固安装十字连接板,十字连接板中部设置螺纹孔,在螺纹孔内螺纹连接旋转螺杆;在所述u形支撑框架一边框内侧设置与电磁铁连接的电源,在电源上设置有控制开关;所述驱动装置固定安装在u形支撑框架另一边框内侧且驱动旋转螺杆旋转;所述承力装置与电磁铁和旋转螺杆连接。
9.本发明无人机外悬挂装置,所述驱动装置包括固定安装在u形支撑框架另一侧边框内侧上的固定块、竖直固定安装在固定块侧部的第一驱动电机以及水平安装在第一驱动电机传动轴底部的传递齿轮;所述传递齿轮与旋转螺杆啮合,第一驱动电机正、反转带动传递齿轮相应的正、反转使旋转螺杆推进与承力装置螺接或反向退出承力装置。
10.本发明无人机外悬挂装置,所述驱动装置包括固定安装在电磁铁上的罩体、倾斜固定安装在罩体内的第二驱动电机、固定安装在第二驱动电机传动轴上的主动斜齿轮、外圈固定安装在倒u形支撑框架横梁底部的轴承、固定安装在轴承内圈上的固定套筒以及固定安装在固定套筒底部的从动斜齿轮,所述主动斜齿轮与从动斜齿轮啮合,从动斜齿轮内
圈设置螺纹,所述旋转螺杆与从动斜齿轮内圈螺纹螺接;所述旋转螺杆上部间隙设置在固定套筒内,第二驱动电机正、反转带动相啮合的主动斜齿轮和从动斜齿轮正、反转使旋转螺杆推进与承力装置螺接或反向退出承力装置,且固定套筒与从动斜齿轮同步转动。
11.本发明无人机外悬挂装置,所述承力装置包括圆形底座、固定安装在圆形底座顶面上的固定圈、固定安装在固定圈顶面边缘上的限位导套以及固定安装在圆形底座底部的承力吊钩,所述限位导套内径大于电磁铁外径;在所述固定圈中部固定安装具有磁性的磁铁连接套,磁铁连接套内壁设置与旋转螺杆匹配的内螺纹,承力装置的电磁铁设置在固定圈顶面时,通电的电磁铁与磁铁连接套吸合,且旋转螺杆与磁铁连接套同轴,第一驱动电机正转带动传递齿轮使旋转螺杆下行推进与磁铁连接套螺接,或第二驱动电机正转使主动斜齿轮和从动斜齿轮转动带动旋转螺杆下行推进与磁铁连接套螺接。
12.本发明无人机外悬挂装置,在固定圈内壁对应的安装连接板,所述磁铁连接套安装在两个连接板之间。
13.本发明无人机外悬挂装置,限位导套呈锥台形,其上口内径大于底口内径,底口内径略大于电磁铁外径。
14.本发明无人机外悬挂装置,第一驱动电机和第二驱动电机的型号均为:jgb37
‑
520微型减速正反转有刷调速直流电机12v,其设有地面遥控器。
15.本发明无人机外悬挂装置使用方法,采用如下步骤:
16.步骤一、无人机与悬吊装置的吊环连接后,将悬吊装置与承力装置对正,电磁铁穿过限位导套,使电磁铁底面与固定圈顶面对正且接触,启动第一驱动电机,第一驱动电机通过传递齿轮使旋转螺杆向下运动与磁铁连接套螺接;再将工具、材料钩挂在承力吊钩上;
17.步骤二、启动无人机,携带外悬挂装置及工具、材料飞至杆塔、导线作业位置,将工具、材料固定在杆塔、导线上后,通过地面控制装置,启动第一驱动电机反向带动传递齿轮退出旋转螺杆与磁铁连接套的连接,然后无人机携带相连接的悬吊装置和承力装置返回地面,完成工具、材料在作业位置的定点自动投放;
18.步骤三、作业完成需从高空收回工具、材料时,先将高空的工具、材料钩挂在承力装置底部的承力吊钩上,无人机与悬吊装置的吊环连接后,首先启动电磁铁电源的控制开关,使电磁铁通电产生磁吸力,无人机启动,携带悬吊装置飞至作业位置附近;
19.步骤四:地面控制微调无人机位置,使悬吊装置与承力装置大体对准,然后缓慢下降无人机高度,依靠电磁铁和磁铁连接套的磁吸力使悬吊装置沿限位导套下降至固定圈顶面,使悬吊装置与承力装置紧密接触,启动第一驱动电机,第一驱动电机通过传递齿轮使旋转螺杆向下运动与磁铁连接套螺接;无人机起飞,与悬吊装置连接的承力装置携带高空的工具、材料返回地面,完成工具、材料的定点自动收回。
20.本发明无人机外悬挂装置使用方法,采用如下步骤:
21.步骤一、无人机与悬吊装置的吊环连接后,将悬吊装置与承力装置对正,电磁铁穿过锥台形的限位导套,使电磁铁底面与固定圈顶面对正且接触,启动第二驱动电机,第二驱动电机通过主动斜齿轮和从动斜齿轮使旋转螺杆向下运动与磁铁连接套螺接;再将工具、材料钩挂在承力吊钩;
22.步骤二、启动无人机,携带外悬挂装置及工具、材料飞至杆塔、导线作业位置,将工具、材料固定在杆塔、导线上后,通过地面控制装置,启动第二驱动电机反向带动主动斜齿
轮和从动斜齿轮退出旋转螺杆与磁铁连接套的连接,然后无人机携带相连接的悬吊装置和承力装置返回地面,完成工具、材料在作业位置的定点自动投放;
23.步骤三、作业完成需从高空收回工具、材料时,先将高空的工具、材料钩挂在承力装置底部的承力吊钩上,无人机与悬吊装置的吊环连接后,首先启动电磁铁的电源控制开关,使电磁铁通电产生磁吸力,无人机启动,携带悬吊装置飞至作业位置附近;
24.步骤四:地面控制微调无人机位置,使悬吊装置与承力装置大体对准,然后缓慢下降无人机高度,依靠电磁铁和磁铁连接套的磁吸力使悬吊装置沿锥台形的限位导套下降至固定圈顶面,使悬吊装置与承力装置紧密接触,启动第二驱动电机,第二驱动电机通过主动斜齿轮和从动斜齿轮使旋转螺杆向下运动与磁铁连接套螺接;无人机起飞,与悬吊装置连接的承力装置携带高空的工具、材料返回地面,完成工具、材料的定点自动收回。
25.本发明的积极效果如下:
26.使用本发明装置在作业完成后从高空收回工具、材料时,由于电磁铁的电源具有开关控制,在地面上打开电磁铁的电源开关使其通电后具有磁吸力,无人机携带悬吊装置飞至承力装置上方与承力装置在体对正,缓慢下降无人机高度,依靠电磁铁和磁铁连接套的磁吸力使悬吊装置沿锥台形的限位导套下降至固定圈顶面,使悬吊装置与承力装置紧密接触。
27.第一驱动电机正、反转带动传递齿轮推进或退出旋转螺杆与磁铁连接套的螺接,或第二驱动电机正、反转通过主动斜齿轮和从动斜齿轮推进或退出旋转螺杆与磁铁连接套螺接,实现无人机携带相连接的悬吊装置和承力装置升起或返回,完成工具、材料在作业位置的定点自动投放和收回。
28.通过设置具有遥控功能的可正、反运转第一驱动电机或第二驱动电机,可以在地面其运行进行控制,实现正转和反转从而推进和反向退出旋转螺杆与磁铁连接套螺接,实现有效控制。
29.使用本发明装置和方法实现无人机悬挂工具、材料飞至超、特高压输电
30.线路的作业位置杆塔、导线并实现定点自动投放、收回的功能,降低检修作业人员劳动强度,提高作业人员安全系数,提升作业效率,克服了些山区、水域等不利条件对作业的影响。
31.本发明装置结构简单,可靠性强,成本低廉,安全可靠。
附图说明
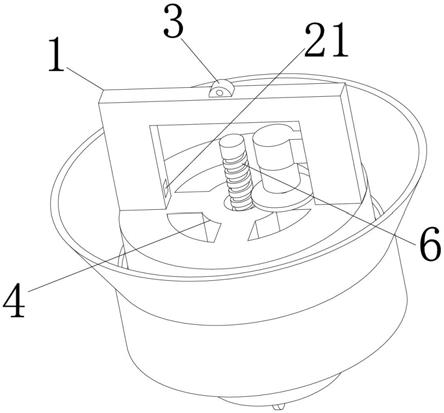
32.附图1为本发明装置结构示意图;
33.附图2为本发明装置的悬吊装置实施例一结构示意图;
34.附图4为本发明装置的限位套结构示意图;
35.附图3为本发明装置的承力装置正视结构示意图;
36.附图5为本发明装置的悬吊装置实施例二结构示意图;
37.附图6为本发明装置的主动斜齿轮与从动斜齿轮啮合结构示意图;
38.附图7为本发明装置的固定套筒结构示意图;
39.附图8为本发明装置从动斜齿轮与固定套筒连接剖视结构示意图。
40.在附图中:
[0041]1‑
u形支撑框架、
[0042]2‑
电磁铁、
[0043]3‑
吊环、
[0044]4‑
十字连接板、
[0045]5‑
螺纹孔、
[0046]6‑
旋转螺杆、
[0047]7‑
固定块、
[0048]8‑
第一驱动电机、
[0049]9‑
传递齿轮、
[0050]
10
‑
罩体、
[0051]
11
‑
第二驱动电机、
[0052]
12
‑
主动斜齿轮、
[0053]
13
‑
固定套筒、
[0054]
14
‑
从动斜齿轮、
[0055]
15
‑
圆形底座、
[0056]
16
‑
固定圈、
[0057]
17
‑
限位导套、
[0058]
18
‑
承力吊钩、
[0059]
19
‑
磁铁连接套、
[0060]
20连接板;
[0061]
21电源;
[0062]
22轴承。
具体实施方式
[0063]
实施例一:
[0064]
如附图1
‑
4所示,本发明无人机外悬挂装置包括与无人机连接的悬吊装置以及安装在悬吊装置底部的用于携带工具和/或材料的承力装置;所述悬吊装置内安装用于与承力装置连接的驱动装置。
[0065]
本发明无人机外悬挂装置的悬吊装置包括倒u形支撑框架1、固定安装在u形支撑框架1底部呈环状的电磁铁2以及固定安装在u形支撑框架1顶部与无人机连接的吊环3,在所述电磁铁2内壁固安装十字连接板4,十字连接板4中部设置螺纹孔5,在螺纹孔5内螺纹连接旋转螺杆6;在所述u形支撑框架1一边框内侧设置与电磁铁2连接的电源21,在电源21上设置有控制开关;所述驱动装置固定安装在u形支撑框架1另一边框内侧且驱动旋转螺杆6旋转;所述承力装置与电磁铁2和旋转螺杆6连接。
[0066]
本发明无人机外悬挂装置的驱动装置包括固定安装在u形支撑框架1一侧边框内壁上的固定块7、竖直固定安装在固定块7侧部的第一驱动电机8以及水平安装在第一驱动电机8传动轴底部的传递齿轮9;所述传递齿轮9与旋转螺杆6啮合,第一驱动电机8正、反转带动传递齿轮9相应的正、反转使旋转螺杆6推进与承力装置螺接或反向退出承力装置。
[0067]
本发明无人机外悬挂装置的承力装置所述承力装置包括圆形底座15、固定安装在
圆形底座15顶面上的固定圈16、固定安装在固定圈16顶面边缘上的限位导套17以及固定安装在圆形底座15底部的承力吊钩18,限位导套17为不导磁的材料,所述限位导套17内径大于电磁铁2外径;在所述固定圈16中部固定安装具有磁性的磁铁连接套19,磁铁连接套19内壁设置与旋转螺杆6匹配的内螺纹,承力装置的电磁铁2设置在固定圈16顶面时,通电的电磁铁2与磁铁连接套19吸合,且旋转螺杆6与磁铁连接套19同轴,第一驱动电机8正转带动传递齿轮9使旋转螺杆6下行推进与磁铁连接套19螺接。
[0068]
本发明无人机外悬挂装置,在固定圈16内壁对应的安装连接板20,所述磁铁连接套19安装在两个连接板20之间。
[0069]
本发明无人机外悬挂装置;第一驱动电机8和第二驱动电机11的型号均为:jgb37
‑
520微型减速正反转有刷调速直流电机12v,其设有地面遥控器。
[0070]
本发明无人机外悬挂装置使用方法,其特征在于采用如下步骤:
[0071]
步骤一、无人机与悬吊装置的吊环3连接后,将悬吊装置与承力装置对正,电磁铁2穿过限位导套17,使电磁铁2底面与固定圈16顶面对正且接触,启动第一驱动电机8,第一驱动电机8通过传递齿轮9使旋转螺杆6向下运动与磁铁连接套19螺接;再将工具、材料钩挂在承力吊钩25;
[0072]
步骤二、启动无人机,携带外悬挂装置及工具、材料飞至杆塔、导线作业位置,将工具、材料固定在杆塔、导线上后,通过地面控制装置,启动第一驱动电机8反向带动传递齿轮9退出旋转螺杆6与磁铁连接套19的连接,然后无人机携带相连接的悬吊装置和承力装置返回地面,完成工具、材料在作业位置的定点自动投放;
[0073]
步骤三、作业完成需从高空收回工具、材料时,先将高空的工具、材料钩挂在承力装置底部的承力吊钩18上,无人机与悬吊装置的吊环3连接后,首先启动电磁铁2的电源21控制开关,使电磁铁2通电产生磁吸力,无人机启动,携带悬吊装置飞至作业位置附近;
[0074]
步骤四:地面控制微调无人机位置,使悬吊装置与承力装置大体对准,然后缓慢下降无人机高度,依靠电磁铁2和磁铁连接套19的磁吸力使悬吊装置沿限位导套17下降至固定圈16顶面,使悬吊装置与承力装置紧密接触,启动第一驱动电机8,第一驱动电机8通过传递齿轮9使旋转螺杆6向下运动与磁铁连接套19螺接;无人机起飞,与悬吊装置连接的承力装置携带高空的工具、材料返回地面,完成工具、材料的定点自动收回。
[0075]
实施例二:
[0076]
如附图4
‑
8所示,本发明无人机外悬挂装置包括与无人机连接的悬吊装置以及安装在悬吊装置底部的用于携带工具和/或材料的承力装置;所述悬吊装置内安装用于与承力装置连接的驱动装置。
[0077]
本发明无人机外悬挂装置的悬吊装置包括倒u形支撑框架1、固定安装在u形支撑框架1底部呈环状的电磁铁2以及固定安装在u形支撑框架1顶部与无人机连接的吊环3,在所述电磁铁2内壁固安装十字连接板4,十字连接板4中部设置螺纹孔5,在螺纹孔5内螺纹连接旋转螺杆6;在所述u形支撑框架1一边框内侧设置与电磁铁2连接的电源21,在电源21上设置有控制开关;所述驱动装置固定安装在u形支撑框架1另一边框内侧且驱动旋转螺杆6旋转;所述承力装置与电磁铁2和旋转螺杆6连接。
[0078]
本发明无人机外悬挂装置的驱动装置包括固定安装在电磁铁2上的罩体10、倾斜固定安装在罩体10内的第二驱动电机11、固定安装在第二驱动电机11传动轴上的主动斜齿
轮12、外圈固定安装在倒u形支撑框架1横梁底部的轴承22、固定安装在轴承22内圈上的固定套筒13以及固定安装在固定套筒13底部的从动斜齿轮14,所述主动斜齿轮12与从动斜齿轮14啮合,从动斜齿轮14内圈设置螺纹,所述旋转螺杆6与从动斜齿轮14内圈螺纹螺接;所述旋转螺杆6上部间隙设置在固定套筒13内,第二驱动电机11正、反转带动相啮合的主动斜齿轮12和从动斜齿轮14正、反转使旋转螺杆6推进与承力装置螺接或反向退出承力装置,且固定套筒13与从动斜齿轮14同步转动。
[0079]
本发明无人机外悬挂装置的承力装置包括圆形底座15、固定安装在圆形底座15顶面上的固定圈16、固定安装在固定圈16顶面边缘上的限位导套17以及固定安装在圆形底座15底部的承力吊钩18,限位导套17为不导磁的材料,所述限位导套17内径大于电磁铁2外径;在所述固定圈16中部固定安装具有磁性的磁铁连接套19,磁铁连接套19内壁设置与旋转螺杆6匹配的内螺纹,承力装置的电磁铁2设置在固定圈16顶面时,通电的电磁铁2与磁铁连接套19吸合,且旋转螺杆6与磁铁连接套19同轴,第二驱动电机11正转使主动斜齿轮12和从动斜齿轮14转动带动旋转螺杆6下行推进与磁铁连接套19螺接。
[0080]
本发明无人机外悬挂装置,在固定圈16内壁对应的安装连接板20,所述磁铁连接套19安装在两个连接板20之间。
[0081]
本发明无人机外悬挂装置,限位导套17呈锥台形,其上口内径大于底口内径,底口内径略大于电磁铁2外径。
[0082]
本发明无人机外悬挂装置;第一驱动电机8和第二驱动电机11的型号均为:jgb37
‑
520微型减速正反转有刷调速直流电机12v,其设有地面遥控器。
[0083]
本发明无人机外悬挂装置使用方法,其特征在于采用如下步骤:
[0084]
步骤一、无人机与悬吊装置的吊环3连接后,将悬吊装置与承力装置对正,电磁铁2穿过锥台形限位导套17,使电磁铁2底面与固定圈16顶面对正且接触,启动第二驱动电机11,第二驱动电机11通过主动斜齿轮12和从动斜齿轮14使旋转螺杆6向下运动与磁铁连接套19螺接;再将工具、材料钩挂在承力吊钩25上;
[0085]
步骤二、启动无人机,携带外悬挂装置及工具、材料飞至杆塔、导线作业位置,将工具、材料固定在杆塔、导线上后,通过地面控制装置,启动第二驱动电机11反向带动主动斜齿轮12和从动斜齿轮14退出旋转螺杆6与磁铁连接套19的连接,然后无人机携带相连接的悬吊装置和承力装置返回地面,完成工具、材料在作业位置的定点自动投放;
[0086]
步骤三、作业完成需从高空收回工具、材料时,先将高空的工具、材料钩挂在承力装置底部的承力吊钩25上,无人机与悬吊装置的吊环3连接后,首先启动电磁铁2电源21的控制开关,使电磁铁2通电产生磁吸力,无人机启动,携带悬吊装置飞至作业位置附近;
[0087]
步骤四:地面控制微调无人机位置,使悬吊装置与承力装置大体对准,然后缓慢下降无人机高度,依靠电磁铁2和磁铁连接套19的磁吸力使悬吊装置沿锥台形的限位导套17下降至固定圈16顶面,使悬吊装置与承力装置紧密接触,启动第二驱动电机11,第二驱动电机11通过主动斜齿轮12和从动斜齿轮14使旋转螺杆6向下运动与磁铁连接套19螺接;无人机起飞,与悬吊装置连接的承力装置携带高空的工具、材料返回地面,完成工具、材料的定点自动收回。
[0088]
使用本发明装置在作业完成后从高空收回工具、材料时,由于电磁铁2的电源21具有开关控制,在地面上打开电磁铁2的电源开关使其通电后具有磁吸力,无人机携带悬吊装
置飞至承力装置上方与承力装置在体对正,缓慢下降无人机高度,依靠电磁铁2和磁铁连接套19的磁吸力使悬吊装置沿锥台形的限位导套17下降至固定圈16顶面,使悬吊装置与承力装置紧密接触
[0089]
第一驱动电机8正、反转带动传递齿轮9推进或退出旋转螺杆6与磁铁连接套19的螺接,或第二驱动电机11正、反转通过主动斜齿轮12和从动斜齿轮14推进或退出旋转螺杆6与磁铁连接套19螺接,实现无人机携带相连接的悬吊装置和承力装置升起或返回,完成工具、材料在作业位置的定点自动投放和收回;
[0090]
通过设置具有遥控功能的可正、反运转第一驱动电机8或第二驱动电机11,可以在地面其运行进行控制,实现正转和反转从而推进和反向退出旋转螺杆6与磁铁连接套9螺接,实现有效控制。
[0091]
使用本发明装置和方法实现无人机悬挂工具、材料飞至超、特高压输电线路的作业位
[0092]
置杆塔、导线并实现定点自动投放、收回的功能,降低检修作业人员劳动强度,提高作业人员安全系数,提升作业效率,克服了些山区、水域等不利条件对作业的影响。
[0093]
本发明装置结构简单,可靠性强,成本低廉,安全可靠。
[0094]
最后说明的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。