1.本技术涉及飞机挂飞技术的领域,尤其是涉及一种机载雷达挂飞装置。
背景技术:
2.装在飞机上的各种雷达的总称。主要用于控制和制导武器,实施空中警戒、侦察,保障准确航行和飞行安全。机载雷达的基本原理和组成与其他军用雷达相同,其特点是:一般都有天线平台稳定系统或数据稳定装置;通常采用3厘米以下的波段;体积小,重量轻;具有良好的防震性能。
3.一般的机载雷达都是直接安装在飞机内部,而对于机载雷达挂飞,是用于将雷达安装在飞机外部,并实现可拆装的方式实现雷达与飞机的连接,也是目前在飞机上安装科学实验设备常用的一种连接方式。
4.针对上述中的相关技术,发明人认为当雷达通过挂飞的形式安装在飞机上时,为了保证雷达的安装稳定性,通常会通过复杂的安装手段将雷达安装在飞机外部,进而导致挂飞试验结束后,雷达的拆卸十分困难,并且安装雷达时也费时费力。
技术实现要素:
5.为了改善进行挂飞试验时雷达拆装困难的问题,本技术提供一种机载雷达挂飞装置。
6.本技术提供的一种机载雷达挂飞装置采用如下的技术方案:一种机载雷达挂飞装置,包括支架以及挂飞仓,所述支架与机体相连接,所述挂飞仓安装在支架上且用于供雷达置放;所述挂飞仓内安装有侧边抵紧机构以及顶部抵紧机构,所述侧边抵紧机构用于从两侧对放置在挂飞仓内的雷达进行相对抵紧,所述顶部抵紧机构用于从雷达上方将雷达抵紧在挂飞仓的内底壁上,所述侧边抵紧机构与顶部抵紧机构传动连接,所述侧边抵紧机构在抵紧雷达过程中驱动顶部抵紧机构同步抵紧雷达;所述挂飞仓的一侧开口设置,所述挂飞仓的开口处铰接设置有开合门。
7.通过采用上述技术方案,安装雷达时,直接把雷达放入挂飞仓内,然后通过侧边抵紧机构从雷达两侧把雷达进行抵紧,而侧边抵紧机构抵紧雷达后,顶部抵紧机构会自动抵接在雷达的顶部,使得雷达从两侧以及顶部都被抵紧,让雷达稳定处于挂飞仓内;而拆卸雷达时,直接松开侧边抵紧机构,顶部抵紧机构也会自动同步松开雷达,随即打开开合门即可,将雷达从挂飞仓内取出,达到安装和拆卸雷达较为方便的效果。
8.可选的,所述侧边抵紧机构包括抵触组件以及驱动组件,所述驱动组件安装在挂飞仓内,所述抵触组件安装在驱动组件上且在挂飞仓内位于雷达的两侧各设置有一个,所述驱动组件用于驱动两个抵触组件相互靠近或远离。
9.通过采用上述技术方案,通过驱动组件把两个抵触组件驱动着相互靠近,从而能把雷达夹持住,使得雷达在挂飞仓内实现夹持稳定。
10.可选的,所述驱动组件包括电机、双向螺纹杆、移动筒以及制动件,所述电机安装
在挂飞仓内,所述双向螺纹杆的一端转动连接在挂飞仓内、另一端与电机的输出轴同轴线连接,所述移动筒与双向螺纹杆螺纹配合,且所述移动筒在双向螺纹杆的两段螺纹旋向相反的杆段上均螺纹套设有一个,所述抵触组件在移动筒上分别安装有一个;所述制动件安装在挂飞仓内且用于阻止移动筒随双向螺纹杆同步转动。
11.通过采用上述技术方案,启动电机,使得电机的输出轴带动双向螺纹杆转动,而螺纹套设在双向螺纹杆上的两个移动筒在制动件的作用下,不会随着双向螺纹杆转动,而是会沿着双向螺纹杆的长度方向移动,使得两个移动筒实现相互靠近或者远离;当两个移动筒相互靠近时,分别位于两个移动筒上的抵触组件也会实现相互靠近,在逐渐靠近的过程中两个抵触组件会实现对雷达的夹持;而当两个移动筒相互远离时,分别位于两个移动筒上的抵触组件也会实现相互远离,从而实现对雷达的松开。达到抵紧和松开雷达较为方便的效果。
12.可选的,所述制动件包括制动轨,所述制动轨的长度方向与双向螺纹杆的长度方向一致,所述制动轨上沿着制动轨的长度方向开设有制动槽,所述移动筒上设置有插入块,所述插入块插入到制动槽内后与制动轨滑动配合。
13.通过采用上述技术方案,当移动筒上的插入块插入到制动轨的制动槽内后,移动筒随双向螺纹杆的转动便会受到限制,使得移动筒能够在双向螺纹杆的转动下沿着双向螺纹杆的长度方向移动,进而达到阻止移动筒随双向螺纹杆转动较为方便的效果。
14.可选的,所述抵触组件包括连接杆、第一弧形贴合片以及第一橡胶层,所述连接杆的一端与移动筒的筒壁相连接,所述第一弧形贴合片安装在连接杆远离移动筒的一端,且所述第一弧形贴合片的弧度与雷达的外壁弧度相配合,一个所述第一弧形贴合片对应一个移动筒;所述第一橡胶层设置在第一弧形贴合片正对雷达外壁的一侧。
15.通过采用上述技术方案,第一弧形贴合片上的第一橡胶层会首先与雷达的表面接触,而雷达两侧的第一弧形贴合片同时相互靠近后,两个第一橡胶层都会贴在雷达表面,使得雷达实现夹紧,并且第一橡胶层的存在能够让雷达在被夹持时不易被夹坏,达到既能实现夹持又能保证雷达夹持时不易被破坏的效果。
16.可选的,所述顶部抵紧机构包括抵紧筒、滑动杆、弹簧、第二弧形贴合片以及第二橡胶层;所述抵紧筒竖直安装在挂飞仓的内顶壁上,所述抵紧筒内竖直开设有滑动腔,所述滑动杆滑动插设在滑动腔内,所述第二弧形贴合片安装在滑动杆位于滑动腔外的一端,且所述第二弧形贴合片的凹面侧竖直朝下,所述第二橡胶层覆设在第二弧形贴合片的凹面侧,所述弹簧安装在滑动腔内且滑动杆插设在弹簧内圈,所述弹簧的一端与滑动腔的内壁相连接、另一端与滑动杆的杆壁相连接,所述弹簧使得滑动杆具有竖直向上移动的趋势;所述挂飞仓内还安装有传动机构,所述传动机构在两个第一弧形贴合片相互靠近时驱动第二弧形贴合片竖直向下移动并抵触在雷达上表面。
17.通过采用上述技术方案,当两个第一弧形贴合片相互靠近时,第二弧形贴合片会自动向下移动,使得第二弧形贴合片上的第二橡胶层直接压迫在雷达的上表面,而此时第一弧形贴合片上的第一橡胶层也会压迫在雷达的侧壁上,这时弹簧处于压缩状态,从而实现同时抵紧的效果;而当两个第一弧形贴合片相互远离时,第二弧形贴合片受到弹簧的恢复弹力后会拉动滑动杆上移,从而带动第二弧形贴合片远离雷达,让雷达的侧壁和顶壁都不再受到抵触,进而实现抵紧和松开雷达较为方便的效果。
18.可选的,所述传动机构包括支杆以及抵触杆;所述支杆竖直安装在连接杆上,所述抵触杆安装在支杆远离连接杆的一端,所述抵紧筒上开设有供抵触杆插入的插入腔,所述插入腔与滑动腔相连通且相互垂直,所述抵触杆远离支杆的一端设置有倾斜推面,所述滑动杆远离第二弧形贴合片的一端设置有倾斜抵面,所述倾斜推面用于与倾斜抵面滑动配合;在弹簧处于自然状态下时,所述倾斜推面与倾斜抵面相正对。
19.通过采用上述技术方案,当两个移动筒相互靠近时,抵触杆会逐渐插入到插入腔内并进入到滑动腔内;而由于抵触杆端部的倾斜推面与滑动杆的倾斜抵面相正对,因此抵触杆在从插入腔进入到滑动腔内的过程中,倾斜推面会占据倾斜抵面的位置,将倾斜抵面推出原本的位置,此时滑动杆受到挤压后会竖直下移,从而带动第二弧形贴合片下移贴合在雷达的上表面;而当两个移动筒相互远离时,抵触杆会从滑动腔内退回到插入腔内,再从插入腔内退出,使得倾斜推面不再占据倾斜抵面的位置,此时滑动杆在弹簧的恢复弹力的作用下会重新回到原来的位置,即滑动杆会带动第二弧形贴合片竖直上升;这样设置后,两侧的第一弧形贴合片夹持住雷达时,顶部的第二弧形贴合片也会抵住雷达;而两侧的第一弧形贴合片远离雷达时,顶部的第二弧形贴合片也会远离雷达,达到同步抵触和分开的效果。
20.可选的,所述挂飞仓的内底壁上还滑动设置有放置板,所述放置板上开设有供雷达放置的放置槽,所述挂飞仓的内底壁上开设有滑动槽,所述放置板背离放置槽的一侧设置有与滑动槽滑动配合的滑动块;所述挂飞仓内设置有联动机构,所述联动机构驱动放置板往挂飞仓的开口侧移动的过程中同时驱动开合门打开、驱动放置板往挂飞仓内移动的过程中同时驱动开合门关闭。
21.通过采用上述技术方案,通过联动机构的设置,能够在打开开合门的同时让放置板自动从挂飞仓内往开口侧移动,使得取出雷达更为方便。
22.可选的,所述挂飞仓的开口上方设置有转动筒,所述开合门的一侧设置有转动杆,所述转动杆转动插设在转动筒内,所述转动筒与转动杆之间设置有橡胶圈。
23.通过采用上述技术方案,转动筒与转动杆的设置能够让开合门实现在挂飞仓上的正常转动,而橡胶圈的设置则能够让转动筒与转动杆之间旋转时提供摩擦力,使得开合门转动能够较为平滑。
24.可选的,所述联动机构包括第一驱动杆、第二驱动杆、扭簧、圆齿轮、齿条以及转动把手;所述挂飞仓的侧壁上设置有驱动罩,所述第一驱动杆转动设置在驱动罩内,所述第一驱动杆与转动杆相垂直且所述第一驱动杆的长度方向与滑动槽的长度方向相平行;所述第一驱动杆的一端同轴线设置有第一锥齿轮,所述转动杆的一端位于驱动罩内且所述转动杆位于驱动罩内的杆段上同轴线设置有与第一锥齿轮相啮合的第二锥齿轮;所述第二驱动杆也转动设置在驱动罩内且与第一驱动杆相垂直,所述第一驱动杆远离第一锥齿轮的一端同轴线设置有第三锥齿轮,所述第二驱动杆的一端设置有与第三锥齿轮相啮合的第四锥齿轮;所述圆齿轮同轴线设置在第二驱动杆远离第四锥齿轮的一端,所述齿条设置在放置板的一侧,且所述齿条的长度方向与滑动槽的长度方向相平行,所述挂飞仓位于驱动罩内的侧壁上开设有穿孔,所述圆齿轮的一侧穿过穿孔后与齿条相啮合;所述转动把手同轴线设置在转动杆上且位于驱动罩外侧,所述扭簧套设在转动杆上,且扭簧的一端与转动杆连接、另一端与转动筒的内壁相连接,所述扭簧使得开合门始终具有向挂飞仓开口侧转动的趋
势。
25.通过采用上述技术方案,需要将挂飞仓内的雷达取出时,直接用手旋转转动把手,使得转动杆开始转动,此时开合门随转动杆的转动也会逐渐往远离挂飞仓的开口侧转动,而转动杆转动后,由于第二锥齿轮与第一锥齿轮相啮合,因此第一驱动杆也会转动;而第三锥齿轮与第四锥齿轮啮合,因此第二驱动杆也会转动,从而带动圆齿轮转动;由于圆齿轮与齿条相啮合,因此齿条会沿着滑动槽的长度方向移动,带动放置板从挂飞仓内自动移出;而当要关上开合门时,扭簧会带动开合门往靠近挂飞仓的开口侧转动,放置板也会自动从挂飞仓外往挂飞仓内移动,进而达到让放置板与开合门同步运转的效果。
26.综上所述,本技术包括以下至少一种有益技术效果:1. 安装雷达时,直接把雷达放入挂飞仓内,然后通过侧边抵紧机构从雷达两侧把雷达进行抵紧,而侧边抵紧机构抵紧雷达后,顶部抵紧机构会自动抵接在雷达的顶部,使得雷达从两侧以及顶部都被抵紧,让雷达稳定处于挂飞仓内;而拆卸雷达时,直接松开侧边抵紧机构,顶部抵紧机构也会自动同步松开雷达,随即打开开合门即可,将雷达从挂飞仓内取出,达到安装和拆卸雷达较为方便的效果;2. 启动电机,使得电机的输出轴带动双向螺纹杆转动,而螺纹套设在双向螺纹杆上的两个移动筒在制动件的作用下,不会随着双向螺纹杆转动,而是会沿着双向螺纹杆的长度方向移动,使得两个移动筒实现相互靠近或者远离;当两个移动筒相互靠近时,分别位于两个移动筒上的抵触组件也会实现相互靠近,在逐渐靠近的过程中两个抵触组件会实现对雷达的夹持;而当两个移动筒相互远离时,分别位于两个移动筒上的抵触组件也会实现相互远离,从而实现对雷达的松开。达到抵紧和松开雷达较为方便的效果;3. 需要将挂飞仓内的雷达取出时,直接用手旋转转动把手,使得转动杆开始转动,此时开合门随转动杆的转动也会逐渐往远离挂飞仓的开口侧转动,而转动杆转动后,由于第二锥齿轮与第一锥齿轮相啮合,因此第一驱动杆也会转动;而第三锥齿轮与第四锥齿轮啮合,因此第二驱动杆也会转动,从而带动圆齿轮转动;由于圆齿轮与齿条相啮合,因此齿条会沿着滑动槽的长度方向移动,带动放置板从挂飞仓内自动移出;而当要关上开合门时,扭簧会带动开合门往靠近挂飞仓的开口侧转动,放置板也会自动从挂飞仓外往挂飞仓内移动,进而达到让放置板与开合门同步运转的效果。
附图说明
27.图1是本技术实施例的结构示意图。
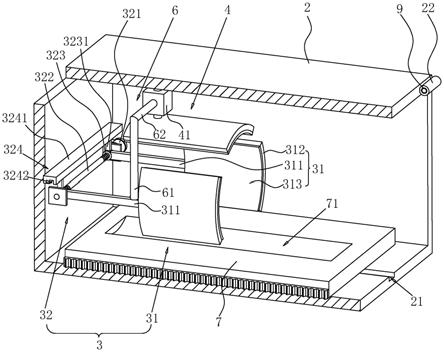
28.图2是本技术实施例的用于展示挂飞仓内部的部分剖视图。
29.图3是本技术实施例的隐藏开合门后的正视图。
30.图4是图3中的a部放大图;图5是本技术实施例的用于展示联动机构的部分剖视图。
31.图6是图5中的b部放大图。
32.附图标记说明:1、支架;2、挂飞仓;21、滑动槽;22、转动筒;3、侧边抵紧机构;31、抵触组件;311、连接杆;312、第一弧形贴合片;313、第一橡胶层;32、驱动组件;321、电机;322、双向螺纹杆;323、移动筒;3231、插入块;324、制动件;3241、制动轨;3242、制动槽;4、顶部抵紧机构;41、
抵紧筒;411、滑动腔;412、插入腔;42、滑动杆;421、倾斜抵面;43、弹簧;44、第二弧形贴合片;45、第二橡胶层;5、开合门;51、转动杆;511、第二锥齿轮;6、传动机构;61、支杆;62、抵触杆;621、倾斜推面;7、放置板;71、放置槽;72、滑动块;8、联动机构;81、第一驱动杆;811、第一锥齿轮;812、第三锥齿轮;82、第二驱动杆;821、第四锥齿轮;83、扭簧;84、圆齿轮;85、齿条;86、转动把手;9、橡胶圈;10、驱动罩;101、穿孔。
具体实施方式
33.以下结合附图1
‑
6对本技术作进一步详细说明。
34.本技术实施例公开一种机载雷达挂飞装置,参照图1、图2,包括支架1以及挂飞仓2,支架1与机体相连接,支架1与机体的连接方式既可以为焊接、也可以为螺栓连接;挂飞仓2安装在支架1上且用于供雷达置放,挂飞仓2的形状为长方体形;挂飞仓2内安装有侧边抵紧机构3以及顶部抵紧机构4,侧边抵紧机构3用于从两侧对放置在挂飞仓2内的雷达进行相对抵紧,顶部抵紧机构4用于从雷达上方将雷达抵紧在挂飞仓2的内底壁上,侧边抵紧机构3与顶部抵紧机构4传动连接,侧边抵紧机构3在抵紧雷达过程中驱动顶部抵紧机构4同步抵紧雷达;挂飞仓2的一侧开口设置,挂飞仓2的开口处铰接设置有开合门5;具体地,挂飞仓2的开口上方设置有转动筒22,开合门5的一侧设置有转动杆51,转动杆51转动插设在转动筒22内,转动筒22与转动杆51之间设置有橡胶圈9;并且,为了让开合门5关闭时更为紧密,在挂飞仓2的开口外壁上设置有一圈磁铁,而在开合门5正对磁铁的表面设置有一圈铁圈,通过铁圈与磁铁的磁性吸附让开合门5能更加紧密地贴合在挂飞仓2的开口处,在挂飞试验中开合门5也不易自动打开。
35.如图2所示,侧边抵紧机构3包括抵触组件31以及驱动组件32,驱动组件32安装在挂飞仓2内,抵触组件31安装在驱动组件32上且在挂飞仓2内位于雷达的两侧各设置有一个,驱动组件32用于驱动两个抵触组件31相互靠近或远离;具体地,驱动组件32包括电机321、双向螺纹杆322、移动筒323以及制动件324;电机321通过螺栓连接安装在挂飞仓2的内壁上,双向螺纹杆322的一端转动连接在挂飞仓2内、另一端与电机321的输出轴同轴线焊接,并且双向螺纹杆322的长度方向与挂飞仓2的宽度方向一致;移动筒323与双向螺纹杆322螺纹配合,且移动筒323在双向螺纹杆322的两段螺纹旋向相反的杆段上均螺纹套设有一个。抵触组件31在移动筒323上分别安装有一个;制动件324安装在挂飞仓2内且用于阻止移动筒323随双向螺纹杆322同步转动。
36.如图2所示,制动件324包括制动轨3241,制动轨3241焊接在挂飞仓2内远离挂飞仓2的开口的仓壁上,并且制动轨3241的长度方向与双向螺纹杆322的长度方向一致;制动轨3241上沿着制动轨3241的长度方向开设有制动槽3242,移动筒323上设置有插入块3231,插入块3231插入到制动槽3242内后与制动轨3241滑动配合。
37.启动电机321,使得电机321的输出轴带动双向螺纹杆322转动,而当移动筒323上的插入块3231插入到制动轨3241的制动槽3242内后,移动筒323随双向螺纹杆322的转动便会受到限制,使得移动筒323能够在双向螺纹杆322的转动下沿着双向螺纹杆322的长度方向移动,进而使得两个移动筒323实现相互靠近或者远离;当两个移动筒323相互靠近时,分别位于两个移动筒323上的抵触组件31也会实现相互靠近,在逐渐靠近的过程中两个抵触组件31会实现对雷达的夹持;而当两个移动筒323相互远离时,分别位于两个移动筒323上
的抵触组件31也会实现相互远离,从而实现对雷达的松开。达到抵紧和松开雷达较为方便的效果。
38.结合图2、图3,抵触组件31包括连接杆311、第一弧形贴合片312以及第一橡胶层313,连接杆311的一端与移动筒323的筒壁相连接,第一弧形贴合片312安装在连接杆311远离移动筒323的一端,且第一弧形贴合片312的弧度与雷达的外壁弧度相配合,一个第一弧形贴合片312对应一个移动筒323;第一橡胶层313设置在第一弧形贴合片312正对雷达外壁的一侧;值得注意的是,在本技术中,雷达的一部分形状为圆柱体形,能够与第一弧形贴合片312相适配,也能够让两个第一弧形贴合片312相互靠近时将雷达实现夹紧。
39.第一弧形贴合片312上的第一橡胶层313会首先与雷达的表面接触,而雷达两侧的第一弧形贴合片312同时相互靠近后,两个第一橡胶层313都会贴在雷达表面,使得雷达实现夹紧,并且第一橡胶层313的存在能够让雷达在被夹持时不易被夹坏,达到既能实现夹持又能保证雷达夹持时不易被破坏的效果。
40.参照图3、4,顶部抵紧机构4包括抵紧筒41、滑动杆42、弹簧43、第二弧形贴合片44以及第二橡胶层45;抵紧筒41竖直焊接在挂飞仓2的内顶壁上,抵紧筒41的形状为长方体形,抵紧筒41内竖直开设有滑动腔411,滑动杆42滑动插设在滑动腔411内,滑动杆42与滑动腔411的形状均为圆形并且滑动杆42与滑动腔411相适配。第二弧形贴合片44焊接在滑动杆42位于滑动腔411外的一端,且第二弧形贴合片44的凹面侧竖直朝下,第二橡胶层45覆设在第二弧形贴合片44的凹面侧。弹簧43安装在滑动腔411内且滑动杆42插设在弹簧43内圈,弹簧43的一端与滑动腔411的内壁相连接、另一端与滑动杆42的杆壁相连接,弹簧43使得滑动杆42具有竖直向上移动的趋势;挂飞仓2内还安装有传动机构6,传动机构6在两个第一弧形贴合片312相互靠近时驱动第二弧形贴合片44竖直向下移动并抵触在雷达上表面。
41.当两个第一弧形贴合片312相互靠近时,第二弧形贴合片44会自动向下移动,使得第二弧形贴合片44上的第二橡胶层45直接压迫在雷达的上表面,而此时第一弧形贴合片312上的第一橡胶层313也会压迫在雷达的侧壁上,这时弹簧43处于压缩状态,从而实现同时抵紧的效果;而当两个第一弧形贴合片312相互远离时,第二弧形贴合片44受到弹簧43的恢复弹力后会拉动滑动杆42上移,从而带动第二弧形贴合片44远离雷达,让雷达的侧壁和顶壁都不再受到抵触,进而实现抵紧和松开雷达较为方便的效果。
42.结合图3、4,传动机构6包括支杆61以及抵触杆62;支杆61竖直安装在连接杆311上,支杆61与连接杆311相互垂直,而抵触杆62安装在支杆61远离连接杆311的一端,抵触杆62与支杆61形成的形状为l形。抵紧筒41上开设有供抵触杆62插入的插入腔412,插入腔412与滑动腔411相连通且相互垂直,插入腔412与滑动腔411形成的截面形状为十字形。抵触杆62远离支杆61的一端设置有倾斜推面621,滑动杆42远离第二弧形贴合片44的一端设置有倾斜抵面421,倾斜推面621用于与倾斜抵面421滑动配合;在弹簧43处于自然状态下时,倾斜推面621与倾斜抵面421相正对。
43.当两个移动筒323相互靠近时,抵触杆62会逐渐插入到插入腔412内并进入到滑动腔411内;而由于抵触杆62端部的倾斜推面621与滑动杆42的倾斜抵面421相正对,因此抵触杆62在从插入腔412进入到滑动腔411内的过程中,倾斜推面621会占据倾斜抵面421的位置,将倾斜抵面421推出原本的位置,此时滑动杆42受到挤压后会竖直下移,从而带动第二弧形贴合片44下移贴合在雷达的上表面;而当两个移动筒323相互远离时,抵触杆62会从滑
动腔411内退回到插入腔412内,再从插入腔412内退出,使得倾斜推面621不再占据倾斜抵面421的位置,此时滑动杆42在弹簧43的恢复弹力的作用下会重新回到原来的位置,即滑动杆42会带动第二弧形贴合片44竖直上升;这样设置后,两侧的第一弧形贴合片312夹持住雷达时,顶部的第二弧形贴合片44也会抵住雷达;而两侧的第一弧形贴合片312远离雷达时,顶部的第二弧形贴合片44也会远离雷达,达到同步抵触和分开的效果。
44.如图2、3所示,挂飞仓2的内底壁上还滑动设置有放置板7,放置板7上开设有供雷达放置的放置槽71;挂飞仓2的内底壁上开设有滑动槽21,滑动槽21的长度方向与挂飞仓2的长度方向一致,且滑动槽21正对开口的一侧敞开设置;放置板7背离放置槽71的一侧设置有与滑动槽21滑动配合的滑动块72;结合图5,挂飞仓2内设置有联动机构8,联动机构8驱动放置板7往挂飞仓2的开口侧移动的过程中同时驱动开合门5打开、驱动放置板7往挂飞仓2内移动的过程中同时驱动开合门5关闭。
45.具体地,结合图3、4,联动机构8包括第一驱动杆81、第二驱动杆82、扭簧83、圆齿轮84、齿条85以及转动把手86;结合图1,挂飞仓2的侧壁上设置有驱动罩10,第一驱动杆81转动设置在驱动罩10内,即第一驱动杆81与挂飞仓2位于驱动罩10内的外壁转动连接;第一驱动杆81与转动杆51相垂直且第一驱动杆81的长度方向与滑动槽21的长度方向相平行;第一驱动杆81的一端同轴线设置有第一锥齿轮811,转动杆51的一端位于驱动罩10内且转动杆51位于驱动罩10内的杆段上同轴线设置有与第一锥齿轮811相啮合的第二锥齿轮511;第二驱动杆82也转动设置在驱动罩10内且与第一驱动杆81相垂直,第一驱动杆81远离第一锥齿轮811的一端同轴线设置有第三锥齿轮812,第二驱动杆82的一端设置有与第三锥齿轮812相啮合的第四锥齿轮821;圆齿轮84同轴线设置在第二驱动杆82远离第四锥齿轮821的一端,齿条85设置在放置板7的一侧,且齿条85的长度方向与滑动槽21的长度方向相平行,挂飞仓2位于驱动罩10内的侧壁上开设有穿孔101,圆齿轮84的一侧穿过穿孔101后与齿条85相啮合;转动把手86同轴线设置在转动杆51上且位于驱动罩10外侧,扭簧83套设在转动杆51上,且扭簧83的一端与转动杆51连接、另一端与转动筒22的内壁相连接,扭簧83使得开合门5始终具有向挂飞仓2开口侧转动的趋势。
46.需要将挂飞仓2内的雷达取出时,直接用手旋转转动把手86,使得转动杆51开始转动,此时开合门5随转动杆51的转动也会逐渐往远离挂飞仓2的开口侧转动,而转动杆51转动后,由于第二锥齿轮511与第一锥齿轮811相啮合,因此第一驱动杆81也会转动;而第三锥齿轮812与第四锥齿轮821啮合,因此第二驱动杆82也会转动,从而带动圆齿轮84转动;由于圆齿轮84与齿条85相啮合,因此齿条85会沿着滑动槽21的长度方向移动,带动放置板7从挂飞仓2内自动移出;而当要关上开合门5时,扭簧83会带动开合门5往靠近挂飞仓2的开口侧转动,放置板7也会自动从挂飞仓2外往挂飞仓2内移动,进而达到让放置板7与开合门5同步运转的效果。
47.本技术实施例一种机载雷达挂飞装置的实施原理为:安装雷达时,直接把雷达放入挂飞仓2内,然后通过侧边抵紧机构3从雷达两侧把雷达进行抵紧,而侧边抵紧机构3抵紧雷达后,顶部抵紧机构4会自动抵接在雷达的顶部,使得雷达从两侧以及顶部都被抵紧,让雷达稳定处于挂飞仓2内;而拆卸雷达时,直接松开侧边抵紧机构3,顶部抵紧机构4也会自动同步松开雷达,随即打开开合门5即可,将雷达从挂飞仓2内取出,达到安装和拆卸雷达较为方便的效果。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。