1.本实用新型涉及无人机技术领域,具体为一种新型太阳能无人机。
背景技术:
2.无人驾驶飞机,俗称:无人飞机、无人机、无人航空载具、无人作战飞机、蜂型机;广义上为不需要驾驶员登机驾驶的各式遥控飞行器,观光型无人飞机与载人飞机相比,它具有体积小、造价低、使用方便的优点,便于那些喜爱观看风景的人民去探索更加广阔的世界,由于现有的大多数无人机不具备较强的续航能力,且无人机降落时会产生较大的向下冲击力,增加了无人机下降时损坏的情况,浪费了可回收能源的利用,不便于使用者较长时间的观光风景,给实际使用带来了一定的不利影响,因此需要进行改进。
技术实现要素:
3.本实用新型的目的在于提供一种新型太阳能无人机,具备了无人机能够拥有较强的续航能力,较大程度上减轻了无人机降落时会产生的向下冲击力,减少了无人机下降时损坏的情况,提高了可回收能源的利用率,便于使用者能够更加清晰快捷的观光风景,增长了使用者观光风景的时间,给使用者带来了便利,给实际使用带来了一定有利影响的优点,解决了以上背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种新型太阳能无人机,包括底框和控制器,所述底框的侧面固定连接有支撑腿,所述底框的上表面固定连接有机箱,所述机箱上表面固定连接有太阳能电池板,所述机箱内壁的底部固定安装有蓄电池,所述蓄电池的顶部固定连接有接触头,所述接触头远离蓄电池的一端穿出机箱的内壁并与太阳能电池板的底部固定安装,所述机箱的侧面固定连接有l型臂,所述l型臂的顶部固定连接有圆盘,所述l型臂的内部开设有空腔,所述空腔内壁的底部固定安装有驱动机一,所述驱动机一的输出端固定连接有转杆,所述转杆远离驱动机一的一端通过轴承转动连接在l型臂的内壁上,所述转杆的表面固定连接有换向组件,所述换向组件的表面固定连接有旋转杆,所述旋转杆的顶端穿出圆盘的表面,所述旋转杆与圆盘通过轴承转动连接,所述旋转杆上靠近其顶端的表面固定连接有旋转叶,所述机箱内壁的表面通过支架固定安装有驱动机二,所述驱动机二和驱动机一均通过导线与蓄电池连接,所述驱动机二和驱动机一均与控制器信号连接,所述驱动机二的输出端固定连接有螺纹杆,所述螺纹杆的表面螺纹连接有螺纹套,所述机箱的底部开设有供螺纹套移动的通槽,所述螺纹套的底端固定连接有滑动组件,所述滑动组件与底框的内壁固定连接,所述滑动组件的底部固定连接有固定杆,所述底框内壁的侧面固定连接固定块,所述固定块的表面通过销轴转动连接有限位组件,所述限位组件与固定杆固定连接,所述限位组件的表面通过销轴转动连接有滚轮,所述底框的底部开设有供滚轮移动的凹槽,所述机箱的表面固定连接有航拍杆。
5.优选的,所述换向组件包括主动锥形齿轮,所述主动锥形齿轮固定连接在转杆的表面上,所述旋转杆的底端固定连接有从动锥形齿轮,所述从动锥形齿轮和主动锥形齿轮
啮合连接。
6.优选的,所述滑动组件包括滑板,所述滑板固定连接在螺纹套的底端上,所述底框的内壁开设有与滑板滑动连接且适配的滑槽。
7.优选的,所述限位组件包括限位杆,所述限位杆通过销轴转动连接在固定块的表面上,所述固定杆的表面固定连接有短杆,所述限位杆的表面开设有与短杆滑动连接且适配的限位槽。
8.优选的,所述太阳能电池板的上表面固定连接有防腐层,且防腐层的颜色为透明色。
9.优选的,所述旋转杆上靠近其中部的表面固定连接有圆板,所述圆板的下表面和圆盘的上表面均开设有半圆槽,所述半圆槽的内壁滑动连接有圆球。
10.与现有技术相比,本实用新型的有益效果是:当使用者需要启动无人机时,使用者能够通过控制器启动驱动机一,驱动机一启动能够带动转杆转动,通过换向组件的设置,使得转杆转动能够带动旋转杆转动,通过半圆槽和圆球的设置,使得旋转杆的转动更加平稳顺畅,旋转杆转动能够带动其上的旋转叶转动,旋转叶的转动速度达到一定值时能够带动无人机飞行,当使用者需要将无人机从空中降落时,使用者能够通过控制器降低无人机的飞行速度,然后使用者能够启动驱动机二,驱动机二启动能够带动螺纹杆转动,通过滑动组件的设置,使得螺纹杆转动能够带动螺纹套向下移动,螺纹套向下移动能够带动固定杆向下移动,通过限位组件的设置,使得固定杆能够带动滚轮向下移动,通过滚轮的设置,减轻了无人机降落时的向下冲击力,减少了无人机下降时损坏的情况,通过太阳能电池板的设置,增强了无人机的续航能力,增加了可回收能源的利用率,通过航拍杆的设置,使得使用者能够更加清晰快捷的观光风景。
附图说明
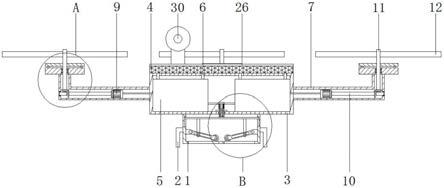
11.图1为本实用新型的正视剖面视图;
12.图2为本实用新型的俯视图;
13.图3为本实用新型控制器的正视图。
14.图4为本实用新型的a处放大图;
15.图5为本实用新型的b处放大图;
16.图中:1
‑
底框、2
‑
支撑腿、3
‑
机箱、4
‑
太阳能电池板、5
‑
蓄电池、 6
‑
接触头、7
‑
l型臂、8
‑
圆盘、9
‑
驱动机一、10
‑
转杆、11
‑
旋转杆、 12
‑
旋转叶、13
‑
驱动机二、14
‑
螺纹杆、15
‑
螺纹套、16
‑
固定杆、17
‑ꢀ
固定块、18
‑
滚轮、19
‑
主动锥形齿轮、20
‑
从动锥形齿轮、21
‑
滑板、 22
‑
滑槽、23
‑
限位杆、24
‑
短杆、25
‑
限位槽、26
‑
防腐层、27
‑
圆板、 28
‑
半圆槽、29
‑
圆球、30
‑
航拍杆、31
‑
控制器。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1至图5,本实用新型提供一种技术方案:一种新型太阳能无人机,包括底框1和控制器31,底框1的侧面固定连接有支撑腿2,底框1的上表面固定连接有机箱3,机箱3上表面固定连接有太阳能电池板4,通过太阳能电池板4的设置,增强了无人机的续航能力,增加了可回收能源的利用率。
19.进一步的,太阳能电池板4的上表面固定连接有防腐层26,且防腐层26的颜色为透明色,通过防腐层26的设置,减轻了外部因素对太阳能电池板的腐蚀效果。
20.机箱3内壁的底部固定安装有蓄电池5,蓄电池5能够有效的储存电量,蓄电池5的顶部固定连接有接触头6,接触头6远离蓄电池5的一端穿出机箱3的内壁并与太阳能电池板4的底部固定安装,机箱3的侧面固定连接有l型臂7,l型臂7的顶部固定连接有圆盘8, l型臂7的内部开设有空腔,空腔内壁的底部固定安装有驱动机一9,驱动机一9的输出端固定连接有转杆10,驱动机一9启动能够带动转杆10转动,转杆10远离驱动机一9的一端通过轴承转动连接在l 型臂7的内壁上,转杆10的表面固定连接有换向组件,换向组件的表面固定连接有旋转杆11,从动锥形齿轮20转动能够带动旋转杆11 转动。
21.进一步的,换向组件包括主动锥形齿轮19,主动锥形齿轮19固定连接在转杆10的表面上,旋转杆11的底端固定连接有从动锥形齿轮20,从动锥形齿轮20和主动锥形齿轮19啮合连接,转杆10转动能够带动主动锥形齿轮19转动,主动锥形齿轮19转动能够带动从动锥形齿轮20转动。
22.旋转杆11的顶端穿出圆盘8的表面,旋转杆11与圆盘8通过轴承转动连接。
23.进一步的,旋转杆11上靠近其中部的表面固定连接有圆板27,圆板27的下表面和圆盘8的上表面均开设有半圆槽28,半圆槽28 的内壁滑动连接有圆球29,通过半圆槽28和圆球29的设置,使得旋转杆11的转动更加平稳顺畅。
24.旋转杆11上靠近其顶端的表面固定连接有旋转叶12,旋转杆11 转动能够带动其上的旋转叶12转动,机箱3内壁的表面通过支架固定安装有驱动机二13,驱动机二13和驱动机一9均为驱动电机与减速器一体安装的结构,通过减速器的设置,避免了驱动电机开始转动时转速过高,且驱动机二13为正反转电机,驱动机二13和驱动机一 9均通过导线与蓄电池5连接,驱动机二13和驱动机一9均与控制器31信号连接,驱动机二13的输出端固定连接有螺纹杆14,驱动机二13启动能够带动螺纹杆14转动,螺纹杆14的表面螺纹连接有螺纹套15,机箱3的底部开设有供螺纹套15移动的通槽,螺纹套15 的底端固定连接有滑动组件,螺纹套15向下移动能够带动滑板21向下移动,滑动组件与底框1的内壁固定连接。
25.进一步的,滑动组件包括滑板21,滑板21固定连接在螺纹套15 的底端上,底框1的内壁开设有与滑板21滑动连接且适配的滑槽22,通过滑槽22和滑板21的设置,对螺纹套15的运动轨迹进行了限位,使得螺纹杆14转动能够带动螺纹套15向下移动。
26.滑动组件的底部固定连接有固定杆16,滑板21向下移动能够带动固定杆16向下移动,底框1内壁的侧面固定连接固定块17,固定块17的表面通过销轴转动连接有限位组件,限位组件与固定杆16固定连接,限位组件的表面通过销轴转动连接有滚轮18,限位杆23向下能够带动滚轮18向下移动。
27.进一步的,限位组件包括限位杆23,限位杆23通过销轴转动连接在固定块17的表面上,短杆24向下移动能够带动限位杆23向下移动,固定杆16的表面固定连接有短杆24,限位杆23的表面开设有与短杆24滑动连接且适配的限位槽25,通过限位杆23和限位槽 25的
设置,使得固定杆16向下移动能够带动短杆24向下移动。
28.底框1的底部开设有供滚轮18移动的凹槽,机箱3的表面固定连接有航拍杆30,通过航拍杆30的设置,使得使用者能够更加清晰快捷的观光风景。
29.工作原理:该新型太阳能无人机在用时,当使用者需要启动无人机时,使用者能够通过控制器31启动驱动机一9,驱动机一9启动能够带动转杆10转动,转杆10转动能够带动主动锥形齿轮19转动,主动锥形齿轮19转动能够带动从动锥形齿轮20转动,从动锥形齿轮 20转动能够带动旋转杆11转动,通过半圆槽28和圆球29的设置,使得旋转杆11的转动更加平稳顺畅,旋转杆11转动能够带动其上的旋转叶12转动,旋转叶12的转动速度达到一定值时能够带动无人机飞行,当使用者需要将无人机从空中降落时,使用者能够通过控制器 31降低无人机的飞行速度,然后使用者能够通过控制器31启动驱动机二13,驱动机二13启动能够带动螺纹杆14转动,通过滑槽22和滑板21的设置,对螺纹套15的运动轨迹进行了限位,使得螺纹杆14转动能够带动螺纹套15向下移动,螺纹套15向下移动能够带动滑板21向下移动,滑板21向下移动能够带动固定杆16向下移动,通过限位杆23和限位槽25的设置,使得固定杆16向下移动能够带动短杆24向下移动,短杆24向下移动能够带动限位杆23向下移动,限位杆23向下能够带动滚轮18向下移动,通过滚轮18的设置,减轻了无人机降落时的向下冲击力,减少了无人机下降时损坏的情况,通过太阳能电池板4的设置,增强了无人机的续航能力,增加了可回收能源的利用率,通过航拍杆30的设置,使得使用者能够更加清晰快捷的观光风景,通过防腐层26的设置,减轻了外部因素对太阳能电池板的腐蚀效果,增长了使用者观光风景的时间,给使用者带来了便利,给实际使用带来了一定的有利影响。
30.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。