1.本实用新型属于粮食种植技术领域,具体为一种粮食种植试验观察检测用无人机。
背景技术:
2.无人机又称为无人驾驶飞机,是利用无线电遥控设备和自备的程序控制装置操纵的小型飞机,安装有自动驾驶仪、程序控制装置等设备,同时由于无人机体积小,灵活度高,无人机在各种场合都能起到一定作用,如粮食种植过程中的试验观察检测。
3.由于粮食种植过程中,粮食附近可能会集聚很多害虫,这些害虫会啃食粮食,对粮食进行破坏,我们需要对稻田中的害虫数量进行粗略统计。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种粮食种植试验观察检测用无人机,有效的解决了检测农田中害虫数量的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种粮食种植试验观察检测用无人机,包括无人机,所述无人机的底端的正面开设有空槽,空槽的内部安装有摄像机,无人机的外侧等角度安装有机翼,无人机底端的中部安装有底柱,底柱的底端安装有连接杆,连接杆的底端等距安装有集虫机构,底柱的底端安装有倒伏感应机构。
6.优选的,所述集虫机构包括集虫筒,集虫筒的顶端安装有连接条,连接杆的底端安装有固定条,集虫筒与连接杆通过连接条和固定条螺纹连接,集虫筒的正面螺纹连接有进虫筒,进虫筒的一端安装有粘虫锥,粘虫锥的内部安装有粘虫纸,粘虫锥的一端安装有活动板。
7.优选的,所述粘虫纸与粘虫锥活动连接,粘虫纸能够替换。
8.优选的,所述连接杆横向设置,连接杆底端的集虫筒设置有四个。
9.优选的,所述倒伏感应机构包括连杆,连杆的底端安装有接触板,连杆的顶端安装有齿轮,底柱的内部开设有转槽,齿轮通过转轴与转槽相连接,底柱的内部安装有位于齿轮背面的齿条,齿条的顶端安装有夹块,无人机(1内部安装有位于齿条上方的滑动变阻器。
10.优选的,所述齿条底端设置多个齿牙,且与齿轮相啮合,齿条的顶端通过夹块与滑动变阻器拨片卡接。
11.优选的,所述接触板为泡沫材质,连杆为铝制材料制成。
12.与现有技术相比,本实用新型的有益效果是:
13.1)、在工作中,通过设置的集虫筒和进虫筒,当无人机在飞行时,进虫筒与稻田中的害虫相碰撞后,一部分害虫被粘虫纸粘连,另一部分从活动板进入到集虫筒中,在无人机飞回后取下各个集虫筒进行统计,粗略计算出稻田中的害虫数量,根据害虫数量来确定喷洒农药的量,继而起到保护农作物的作用;
14.2)、在工作中,通过设置的接触板在无人机飞行过程中会与下方的农作物接触,当
碰到农作物时会使连杆绕着齿轮转动,从而带动齿条移动,继而改变滑动变阻器的阻值,继而检测出农作物是否有倒伏情况。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
16.在附图中:
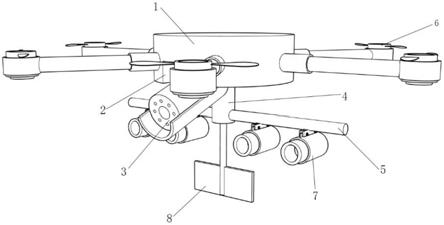
17.图1为本实用新型的结构示意图;
18.图2为本实用新型的集虫机构结构示意图;
19.图3为本实用新型的倒伏感应机构结构示意图;
20.图4为本实用新型的齿条结构示意图。
21.图中:1、无人机;2、空槽;3、摄像机;4、底柱;5、连接杆;6、机翼;7、集虫机构;701、集虫筒;702、连接条;703、固定条;704、进虫筒;705、粘虫锥;706、粘虫纸;707、活动板;8、倒伏感应机构;801、连杆;802、接触板;803、转槽;804、齿轮;805、齿条;806、夹块。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例一,由图1、图2、图3和图4给出,本实用新型包括包括无人机(1),所述无人机(1)的底端的正面开设有空槽(2),空槽(2)的内部安装有摄像机(3),无人机(1)的外侧等角度安装有机翼(6),无人机(1)底端的中部安装有底柱(4),底柱(4)的底端安装有连接杆(5),连接杆(5)的底端等距安装有集虫机构(7),底柱(4)的底端安装有倒伏感应机构(8)。
24.实施例二,在实施例一的基础上,所述集虫机构(7)包括集虫筒(701),集虫筒(701)的顶端安装有连接条(702),连接杆(5)的底端安装有固定条(703),集虫筒(701)与连接杆(5)通过连接条(702)和固定条(703)螺纹连接,集虫筒(701)的正面螺纹连接有进虫筒(704),进虫筒(704)的一端安装有粘虫锥(705),粘虫锥(705)的内部安装有粘虫纸(706),粘虫锥(705)的一端安装有活动板(707)。
25.实施例三,在实施例二的基础上,粘虫纸706与粘虫锥705活动连接,粘虫纸706能够替换,能够使粘虫锥705多次利用,只需要更换粘虫纸706即可。
26.实施例四,在实施例二的基础上,连接杆5横向设置,连接杆5底端的集虫筒701设置有四个,通过设置四个集虫筒701,进行多组收集,提高害虫数量统计精度。
27.实施例五,在实施例一的基础上,倒伏感应机构8包括连杆801,连杆801的底端安装有接触板802,连杆801的顶端安装有齿轮804,底柱4的内部开设有转槽803,齿轮804通过转轴与转槽803相连接,底柱4的内部安装有位于齿轮804背面的齿条805,齿条805的顶端安装有夹块806,无人机1内部安装有位于齿条805上方的滑动变阻器。
28.实施例六,在实施例五的基础上,齿条805底端设置多个齿牙,且与齿轮804相啮合,齿条805的顶端通过夹块806与滑动变阻器拨片卡接。
29.实施例七,在实施例五的基础上,接触板802为泡沫材质,连杆801为铝制材料制成,连杆801较重,使得接触板802只有在接触到农作物时才能转动,而不会被风吹动,继而影响检测结果。
30.工作原理:工作时,首先将集虫筒701通过连接条702与固定条703螺纹连接,使得集虫筒701固定在连接杆5下方,将进虫筒704安装在集虫筒701内部,粘虫锥705内部的粘虫纸706能够更换,开启无人机1,使得无人机1飞到稻田中进行检测;
31.无人机1飞行高度为集虫筒701与农作物高度相同,当无人机1向前飞行过程中,农作物中的害虫不断与进虫筒704碰撞,一些害虫进入到进虫筒704中后粘连在粘虫纸706上,而另一些害虫与活动板707碰撞后,将活动板707撞开后进入到集虫筒701中,而害虫在进入到集虫筒701中后,活动板707无法从集虫筒701内部打开,使得集虫筒701内害虫得以收集,当无人机1飞回后,取下集虫筒701,计算各个集虫筒701中和粘虫纸706上害虫的数量,并取均值,粗略的计算出害虫的数量,通过害虫的数量决定使用多少浓度的农药进行去害,继而保护农作物的生长。
32.无人机1内部安装有滑动变阻器,通过滑动变阻器影响无人机1内部检测农作物是否倒伏情况的电路电流,当无人机1飞行在农田中时,当农作物与接触板802接触时,此时接触板802受到阻力向后转动,而齿轮804与齿条805相啮合,使得在齿轮804转动的过程中带动齿条805向上移动,而齿条805顶端设置有夹块806,夹块806与滑动变阻器的拨片连接,使得在齿条805向上移动后能够带动滑动变阻器拨片移动,继而使得无人机1内部检测电路电流变大,从而在遇到农作物倒伏的情况下,接触板802无法带动齿轮804转动,继而使得滑动变阻器阻值回到原阻值,继而使得检测装置的电信号出现变化,从而判断农田中农作物是否出现倒伏或长势较矮的情况。
33.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。