1.本公开涉及无人机技术领域,具体而言,涉及一种起落架及无人机。
背景技术:
2.无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。
3.无人机在起落时与地上的障碍物接触,容易发生倾到或者反弹。而无人机反弹和倾倒产生的震动,会损坏无人机内部的精密零件,为此对机体结构或者机载设备造成不良影响。
4.需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.本公开的目的在于克服现有无人机起落时与地上的障碍物接触,容易发生倾到或者反弹的问题,提供一种起落架及无人机。
6.根据本公开的一个方面,提供一种起落架,包括升降机构和减震机构;升降机构包括第一连接板、至少一对第二连接板和推杆,两个第二连接板沿第一方向关于第一连接板的中部对称设置,第二方向垂直于第一方向,第二连接板间隔设于第一连接板的第一面,推杆连接于第二连接板与第一连接板之间;减震机构包括两组缓冲组件,两组缓冲组件分别设于两个第二连接板远离一连接板的一侧,缓冲组件包括至少一对滚轮、至少一对第一活塞杆和至少一对弹簧,两个滚轮沿第二方向关于第二连接板的中部对称,两个滚轮的安装支架转动连接第二连接板远离第一连接板的第一面;两个第一活塞杆的一端转动连接于两个滚轮的安装支架相互靠近或相互远离的一侧,另一端转动连接于第二连接板;两个弹簧分别套设于第一活塞杆外,弹簧的两端分别与滚轮和第二连接板接触。
7.在本公开的一个实施例中,第一活塞杆的一端转动连接于两个滚轮的安装支架相互靠近的一侧,另一端转动连接于第二连接板位于两个滚轮之间的部分。
8.在本公开的一个实施例中,滚轮的安装支架朝向第一活塞杆与第二连接板的固定位置倾斜。
9.在本公开的一个实施例中,起落架还包括至少一对第三连接板,第三连接板设于第一连接板与推杆之间。
10.在本公开的一个实施例中,起落架还包括至少一对第二活塞杆,两个第二活塞杆关于推杆对称设置,第二活塞杆的两端分别与第二连接板和第三连接板连接。
11.根据本公开的另一个方面,提供一种无人机,包括本公开的一个方面的起落架、无人机机体和搭载装置,搭载装置设于两个推杆之间,且位于第一连接板的第一面,无人机机体设于第一连接板与第一面相对的第二面,搭载装置包括安装板、电机、传动机构、至少一
对滑轨和一对夹板,安装板与第一连接板连接,两个滑轨沿第二方向对称设于安装板中部两侧,两个夹板沿第一方向对称设于安装板中部两侧,且位于两所述推杆之间,夹板与两个滑轨均滑动连接,电机的输出轴穿过安装板;传动机构与电机的输出轴固定连接,用于带动夹板与电极的输出轴同步转动。
12.在本公开的一个实施例中,两个夹板的相互靠近的一侧均设有防滑层,防滑层的侧面均开设有若干组的防滑槽。
13.在本公开的一个实施例中,传动机构包括限位件、齿轮和齿条,限位件连接于安装板远离第一连接板的一侧,齿轮和齿条设于限位件与安装板之间,齿条啮合于齿轮的圆周相对的两点。
14.在本公开的一个实施例中,每个滑轨与夹板之间设有滑块,滑块与夹板固定连接,滑块与滑轨滑动连接。
15.在本公开的一个实施例中,无人机还包括控制系统,控制系统设于无人机机体远离第一连接板的一侧,控制系统包括gps导航模块、5g通信模块、远程控制终端和控制器,gps导航模块与无人机本体电性连接,用于实时监测无人机本体的三维位置和三维速度;5g通信模块与控制器电性连接,5g通信模块用于发送三维位置和三维速度;远程控制终端接收三维位置和三维速度,并发送操作指令;控制器与无人机机体电性连接,控制器用于接收操作指令,并控制推杆和电机。
16.本公开的起落架,包括升降机构和减震机构,当遇到较大的障碍物时,推杆改变第二连接板与第一连接板之间的距离,升高无人机机体,避开路面上较大的障碍物,避免无人机发生倾倒。当遇到较小的障碍物,无人机机体产生震动时,第二连接板向下移动,则两个滚轮的安装支架向靠近第二连接板的方向转动,第一活塞杆的长度缩短,两个滚轮的安装支架与第二连接板对弹簧进行挤压,实现柔性缓冲,无人机基本不发生反弹。因此,该起落架能防止无人机发生倾倒或反弹,具有很好减震效果,避免了震动对无人机内部的精密元件造成损坏。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
18.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1为本公开实施例涉及的起落架的立体结构图。
20.图2为本公开实施例涉及的缓冲组件的立体结构图。
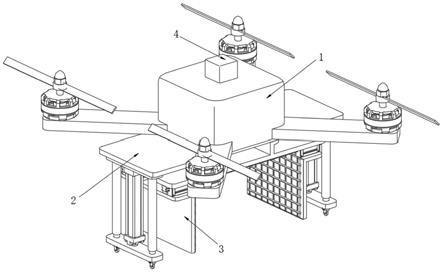
21.图3为本公开实施例涉及的无人机的立体结构图。
22.图4为本公开实施例涉及的搭载装置的立体结构图。
23.图5为本公开实施例涉及的搭载装置的爆炸图。
24.图6为本公开实施例涉及的控制系统的结构框图。
25.图中:1
‑
无人机机体;2
‑
升降机构;21
‑
第一连接板;22
‑
第一通孔;23
‑
第三连接板;
24
‑
电动推杆;25
‑
第二活塞杆;26
‑
缓冲组件;261
‑
第二连接板;262
‑
第二连接部;263
‑
第一连接部;264
‑
滚轮;265
‑
第三连接部;266
‑
第一活塞杆;267
‑
弹簧;3
‑
搭载装置;31
‑
安装板;32
‑
第一紧固螺栓;33
‑
第二通孔;34
‑
电机;35
‑
齿轮;36
‑
齿条;37
‑
限位件;38
‑
第二紧固螺栓;39
‑
第三通孔;310
‑
第四通孔;311
‑
滑轨;312
‑
滑块;313
‑
夹板;314
‑
第三紧固螺栓;315
‑
连接件;316
‑
第四紧固螺栓;317
‑
防滑层;318
‑
防滑槽;4
‑
控制系统;41
‑
控制器;42
‑
5g通信模块;43
‑
gps导航模块;44
‑
远程控制终端。
具体实施方式
26.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本公开将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。此外,附图仅为本公开的示意性图解,并非一定是按比例绘制。
27.虽然本说明书中使用相对性的用语,例如“上”“下”来描述图标的一个组件对于另一组件的相对关系,但是这些术语用于本说明书中仅出于方便,例如根据附图中所述的示例的方向。能理解的是,如果将图标的装置翻转使其上下颠倒,则所叙述在“上”的组件将会成为在“下”的组件。当某结构在其它结构“上”时,有可能是指某结构一体形成于其它结构上,或指某结构“直接”设置在其它结构上,或指某结构通过另一结构“间接”设置在其它结构上。
28.用语“一个”、“一”、“该”、“所述”和“至少一个”用以表示存在一个或多个要素/组成部分/等;用语“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等;用语“第一”、“第二”和“第三”等仅作为标记使用,不是对其对象的数量限制。
29.如图1和图2所示,本公开实施方式提供了一种起落架。该起落架包括升降机构2和减震机构;升降机构2包括第一连接板21、至少一对第二连接板261和电动推杆24,两个第二连接板261沿第一方向关于第一连接板21的中部对称设置,第二连接板261间隔设于第一连接板21的第一面,电动推杆24连接于第二连接板261与第一连接板21之间;减震机构包括至少一对滚轮264、至少一对第一活塞杆266和至少一对弹簧267,两个滚轮264沿第二方向关于第二连接板261的中部对称,第二方向垂直于第一方向,两个滚轮264的安装支架转动连接第二连接板261远离第一连接板21的第一面;两个第一活塞杆266的一端转动连接于两个安装支架相互靠近或相互远离的一侧,另一端转动连接于第二连接板261;两个弹簧267分别套设于第一活塞杆266外,弹簧267的两端分别与滚轮264和第二连接板261接触。
30.当遇到较大的障碍物时,电动推杆24改变第二连接板261与第一连接板21之间的距离,升高无人机机体,避开路面上较大的障碍物,避免无人机发生倾倒。当遇到较小的障碍物,无人机机体产生震动时,第二连接板261向下移动,则两个滚轮264的安装支架向靠近第二连接板261的方向转动,第一活塞杆266的长度缩短,两个滚轮264的安装支架与第二连接板261对弹簧267进行挤压,实现柔性缓冲,无人机基本不发生反弹。因此,该起落架能防止无人机发生倾倒或反弹,具有很好减震效果,避免了震动对无人机内部的精密元件造成损坏。
31.参见图1和图2,起落架包括升降机构2,升降机构2包括第一连接板21、两个第二连接板261和两个第三连接板23,两个第三连接板23设于第一连接板21的第一面,两个第三连接板23沿第一方向关于第一连接板21的中部对称设置,两个第二连接板261间隔设于两个第三连接板23远离第一连接板21的一面,第二连接板261与第一连接板21之间设有电动推杆24,电动推杆24的两侧分别设有一个第二活塞杆25,第二活塞杆25沿第二方向关于电动推杆24对称设置,第二方向垂直于第一方向,电动推杆24及两个第二活塞杆25的两端分别连接第二连接板261和第三连接板23。
32.减震机构包括两组缓冲组件26,两组缓冲组件26分别设于两个第二连接板261远离第三连接板23的一侧,缓冲组件26包括两个第一连接部263和两个滚轮264,两个第一连接部263沿第二方向关于第二连接板261的中部对称,两个滚轮264的安装支架转动连接于第一连接部263上,两个第一连接部263之间设有两个第二连接部262,两个第二连接部262关于第二连接板261的中部对称,两个滚轮264的安装支架靠近第二连接部262的一侧设有第三连接部265。第二连接部262与第三连接部265之间连接有第一活塞杆266,第一活塞杆266外套设有弹簧267,弹簧267的两端分别与滚轮264和第二连接板261接触。在弹簧267的作用下,两组缓冲组件26未与地面接触时,滚轮264的安装支架朝向第二连接部262与第二连接板261的固定位置倾斜,即每组缓冲组件26的两个滚轮264的安装支架处于相互靠近的状态,以便在滚轮264受力时,弹簧267第一时间产生变形,能起到更好的缓冲效果。
33.升降机构2在实际使用中,通过电动推杆24伸缩,可带动两组第一活塞杆266进行伸缩,从而对缓冲组件26与第一连接板21之间的距离进行调节,从而避开地面较大的障碍物。在遇到较小的障碍物时无需进行避让,滚轮264与障碍物接触,第三连接板23向下移动,两个滚轮264的安装支架向靠近第二连接板261的方向转动,第一活塞杆266的长度缩短,两个滚轮264的安装支架与第二连接板261对弹簧267进行挤压,实现柔性缓冲,进而实现减震的效果。
34.需要说明的是,上面所提到的第一方向为第一连接板21的长度方向,第二方向为第一连接板21的宽度方向。
35.如图1至图6所示,本公开实施方式提供了一种无人机。该无人机包括本公开实施方式提供的起落架、无人机机体1和搭载装置3,无人机机体1设于第一连接板21与第一面相对的第二面,搭载装置3设于两个电动推杆24之间,搭载装置3包括安装板、电机34、传动机构、至少一对滑轨311和一对夹板313,安装板连接于第一连接板21的第一面,两个滑轨311沿第二方向对称设于安装板中部两侧,两个夹板313沿第一方向对称设于安装板中部两侧,夹板313与两个滑轨311均滑动连接,电机34的输出轴穿过安装板;传动机构与电机34的输出轴固定连接,用于带动夹板313与电极的输出轴同步转动。
36.搭载装置3在实际使用中,电机34的输出轴转动,通过传动机构带动两个夹板313沿着两组滑轨311同步相互靠近,进而对物体进行夹持搭载。可以通过起落架中的升降机构2改变无人机机体1与地面的高度差,调节夹板313与待夹持物品的相对位置。
37.参见图3至图5,无人机包括起落架、无人机机体1和搭载装置3,搭载装置3连接于第一连接板21的第一面,无人机机体1设于第一连接板21与所述第一面相对的第二面。
38.搭载装置3包括安装板31,安装板31靠近第一连接板21的一面设有沿第二方向延伸的支撑板,支撑板沿第一方向关于第一连接板21的中部对称。每个支撑板上设有两个第
一紧固螺栓32,第一连接板21上设有与两个支撑板的四个第一紧固螺栓32对应的四个第一通孔22,通过第一紧固螺栓32穿过第一通孔22将安装板31与第一连接板21固定在一起。
39.两个支撑板之间设有电机34,电机34可以采用扁平伺服电机。安装板31远离所述第一连接板21的一侧设有限位件37,安装板31的中心设有第二通孔33,限位件37的中心设有第三通孔39,电机34的输出轴依次穿过第二通孔33和第三通孔39,输出轴的穿出端套接有齿轮35,齿轮35的的圆周对称的两点啮合连接有两组齿条36,限位件37沿第二方向的两侧具有两个支边,两个支边靠近第一连接板21的一侧的设有第二紧固螺栓38,通过第二紧固螺栓38将限位件37与安装板31连接起来,齿轮35和齿条36设于限位件37与安装板31之间。
40.搭载装置3包括还包括两个滑轨311,两个滑轨311沿第二方向对称设于所述安装板31限位件37两侧,滑轨311固定连接于安装板31上。两个滑轨311的两端分别设有一个滑块312,位于两个滑轨311的同一端的两个滑块312远离第一连接板21的一侧设有夹板313,夹板313与两个滑块312正对的位置设有两组第三紧固螺栓314,夹板313通过两组第三紧固螺栓314分别与两个滑块312固定连接。两个夹板313沿第一方向对称设于安装板31中部两侧,且位于两所述电动推杆24之间,夹板313与两个滑轨311均滑动连接。夹板313上设有连接件315,连接件315上设有第四紧固螺栓316,通过第四紧固螺栓316与滑轨311上的第四通孔310配合将夹板313与滑轨311固定在一起。
41.由于两个夹板313相互靠近的一侧均粘合连接有防滑层317,防滑层317可减少对搭载物体的损坏,同时减少两组夹板313受到的磨损,增加使用寿命。每个防滑层317的侧面均开设有若干组的防滑槽318,可增加与搭载物体之间的摩擦力,使夹持更牢固。示例性的,防滑层317的材质可以采用橡胶。
42.搭载装置3在实际使用中,可以先电动推杆24带动第二活塞杆25伸缩,改变无人机机体1与地面的高度差,调节夹板313与待夹持物品的相对位置。待夹板313的相对位置确定后,通过电机34带动齿轮35转动,齿轮35带动两个齿条36沿第一方向移动,从而带动两个夹板313顺着两个滑轨311相互靠近,进而对物体进行夹持搭载。
43.参见图6,无人机还包括控制系统4,控制系统4设于无人机机体1远离第一连接板21的一侧,控制系统4包括gps导航模块43、5g通信模块42、远程控制终端44和控制器41,gps导航模块43与无人机本体电性连接,用于实时监测无人机本体的三维位置和三维速度;5g通信模块42与控制器41电性连接,5g通信模块42用于发送三维位置和三维速度;远程控制终端44接收三维位置和三维速度,并发送操作指令;控制器41与无人机机体1电性连接,控制器41用于接收操作指令,并控制电动推杆24和电机34。
44.使用时,当gps导航模块43实时监测无人机本体的三维位置和三维速度均为零时,通过5g通信模块42进行接收并发送至远程控制终端44,远程控制终端44确定三维速度小于某一数值时,发送第一操作指令至控制器41,由控制器41对电动推杆24进行操控,使得电动推杆24伸长至最大值,可带动两个第二活塞杆25进行伸长,直至使无人机机体1与地面的距离达到最大值。接着降落无人机,使搭载装置3位于待搭载物体的正上方,且位于两个夹板313之间,远程控制终端44发送第二操作指令至控制器41,控制器41控制电动推杆24缩短,进而使两个第二活塞杆25缩短,直至夹板313与待搭载物体处于同一高度。远程控制终端44发送第三控制指令,启动电机34。
45.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。