1.本实用新型属于无人机设备技术领域,尤其涉及一种太阳能无人机的空中续航系统。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,通过内置的蓄电池,提供无人机螺旋桨的动力,通常通过充电桩进行充电作业的,也有通过太阳能电池板的充电方式。
3.现有的太阳能无人机的空中续航系统,在其使用的过程中,无人机因供电电池有限,存在续航时间有限的问题,导致在工作区域无法长时间连续作业,效率低,现在的很多太阳能无人机都是靠电池板边飞边充电,但是太阳能电池板充电慢,往往充几个小时,可能几分钟就消耗完了,又或者是增加电池板的电容量来达到续航的目的,但是电容量越大的电池质量越重,增加无人机的自身重量,飞行时需要的电量更大,是一种利弊共存的状态。
技术实现要素:
4.本实用新型提供一种太阳能无人机的空中续航系统,旨在解决无人机续航短的技术问题,可以飞行与充电持续交换进行,在无需人控制的情况下完成远程飞行任务。
5.本实用新型是这样实现的,一种太阳能无人机的空中续航系统,包括有无人机本体,所述无人机本体四周固定连接有四根连接杆,且四根连接杆另一端固定连接有螺旋桨基座,并且该螺旋桨基座顶端安装有螺旋桨,所述无人机本体底端安装有收纳箱,且收纳箱内部开设有两个收纳腔,所述收纳箱前端面固定连接有红外传感摄像头,所述收纳腔内部两侧开设有滑槽,且滑槽内部套接插设有滑块,所述滑块另一端固定连接有太阳板模组,所述收纳箱一侧嵌合连接有第一液压杆,且第一液压杆与太阳板模组之间固定连接,所述收纳箱底端固定连接有两个超声波识别模组。
6.优选的,所述太阳板模组与收纳腔活动连接,且太阳板模组通过滑块与滑槽构成滑动结构。
7.优选的,所述第一液压杆一端与收纳腔内部连接,所述太阳板模组通过第一液压杆与收纳箱构成伸缩结构。
8.优选的,所述收纳箱底端两侧固定连接有第一活动轴,且第一活动轴另一端转动连接有支撑架,所述收纳箱底端固定连接有两个第二活动轴,且第二活动轴另一端转动连接有第二液压杆,所述第二液压杆与支撑架之间固定连接有第三活动轴。
9.优选的,所述第二液压杆通过第三活动轴与支撑架之间构成第一旋转结构,且第二液压杆通过第二活动轴与收纳箱之间构成第二旋转结构。
10.优选的,所述支撑架通过第一活动轴与收纳箱之间构成第三旋转结构,且支撑架通过第二液压杆、第一活动轴与收纳箱之间构成可折叠结构。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型中,通过超声波识别模组,可以监测地面的平坦光流,当无人机需要充电作业时,可以识别飞行路上适合降落的、有光照可充电的平坦路段,再通过第一液压杆,可以将收纳腔内的太阳板模组推出,使其两个太阳板模组展开,进行太阳能充电作业,展开的太阳能板可以提高充电速度,并在飞行时收纳,减少风阻不妨碍飞行作业,且通过红外传感摄像头,可以在地面停靠时,监测是否有人类、动物靠近,一旦有不利因素,可以放弃当前位置,起飞继续巡航寻找安全降落点。
13.2、本实用新型中,通过第二液压杆,可以推动着支撑架转动,使其两个支撑架可以转动至合适角度,通过两个可调节的支撑架,可以当无人机本体在停靠充电时,更为平稳,防止地面坑洼造成无人机出现倾倒。
附图说明
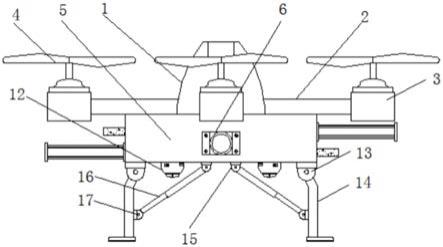
14.图1为本实用新型电热式热空气能暖气设备的主视结构示意图;
15.图2为本实用新型中内部的结构示意图;
16.图3为本实用新型中收纳箱俯视内部的结构示意图。
17.图中:1、无人机本体;2、连接杆;3、螺旋桨基座;4、螺旋桨;5、收纳箱;6、红外传感摄像头;7、收纳腔;8、滑槽;9、滑块;10、太阳板模组;11、第一液压杆;12、超声波识别模组;13、第一活动轴;14、支撑架;15、第二活动轴;16、第二液压杆;17、第三活动轴。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
19.请参阅图1
‑
3,本实用新型提供一种太阳能无人机的空中续航系统,包括有无人机本体1,无人机本体1四周固定连接有四根连接杆2,且四根连接杆2另一端固定连接有螺旋桨基座3,并且该螺旋桨基座3顶端安装有螺旋桨4,无人机本体1底端安装有收纳箱5,且收纳箱5内部开设有两个收纳腔7,收纳箱5前端面固定连接有红外传感摄像头6,收纳腔7内部两侧开设有滑槽8,且滑槽8内部套接插设有滑块9,滑块9另一端固定连接有太阳板模组10,收纳箱5一侧嵌合连接有第一液压杆11,且第一液压杆11与太阳板模组10之间固定连接,收纳箱5底端固定连接有两个超声波识别模组12。
20.在本实施方式中,红外传感摄像头6在光谱中波长自0.76至400微米的一段称为红外线,红外线是不可见光线,所有高于绝对零度(
‑
273.15℃)的物质都可以产生红外线。现代物理学称之为热射线,可以监测是否有人类或动物靠近装置。
21.具体的,太阳板模组10与收纳腔7活动连接,且太阳板模组10通过滑块9与滑槽8构成滑动结构。在本实施方式中,第一液压杆11可以推动着太阳板模组10,使其两个太阳板模组10展开或收纳。
22.第一液压杆11一端与收纳腔7内部连接,太阳板模组10通过第一液压杆11与收纳箱5构成伸缩结构。在本实施方式中,太阳板模组10通过连接线,与无人机本体1内置的蓄电池连接。
23.进一步的,收纳箱5底端两侧固定连接有第一活动轴13,且第一活动轴13另一端转
动连接有支撑架14,收纳箱5底端固定连接有两个第二活动轴15,且第二活动轴15另一端转动连接有第二液压杆16,第二液压杆16与支撑架14之间固定连接有第三活动轴17。
24.在本实施方式中,第二液压杆16可以推动着支撑架14,使其支撑架14能够通过第一活动轴13转动,调节角度。
25.进一步的,第二液压杆16通过第三活动轴17与支撑架14之间构成第一旋转结构,且第二液压杆16通过第二活动轴15与收纳箱5之间构成第二旋转结构。在本实施方式中,通过两个可调节角度的支撑架14,可以对装置进行平稳的支撑。
26.进一步的,支撑架14通过第一活动轴13与收纳箱5之间构成第三旋转结构,且支撑架14通过第二液压杆16、第一活动轴13与收纳箱5之间构成可折叠结构。在本实施方式中,支撑架14可以折叠,使其无人机本体1在飞行时,降低风阻。
27.本实用新型的工作原理及使用流程:使用时,首先当无人机本体1出现电量不足时,通过超声波识别模组12,监测扫描地面的平坦光流,寻找适合降落的、有光照可充电的平坦路段,当无人机本体1停靠在合适地面时,通过第二液压杆16推动着支撑架14,使其支撑架14通过第一活动轴13转动,将两个支撑架14转动至合适角度,通过两个可调节好的支撑架14,将无人机本体1平稳的停靠,再通过第一液压杆11,推动着太阳板模组10,使其太阳板模组10通过滑块9在滑槽8内滑动,从收纳腔7内推出,将其两个太阳板模组10展开,进行太阳能充电作业,通过红外传感摄像头6,监测扫描是否有人类、动物靠近,一旦有不利因素,太阳板模组10收纳,放弃当前位置,起飞继续巡航寻找安全降落点,就这样完成了本实用新型的工作原理。
28.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。