1.本发明涉及无人机技术领域,特别涉及一种培训用防损坏无人机。
背景技术:
2.随着无人机应用的蓬勃发展,无人机飞手的培训需求越来越迫切,通过培训提高飞手水平,降低炸机概率,已经成为行业共识,同时也是有关主管单位的明确要求,目前,用于培训的无人机大多数为品牌整机或者自制的无人机,其主要由机体、设于机体内的控制板、集成于控制板上的相关电子元件以及旋翼组成。
3.无人机新飞手由于不熟悉无人机的操作技巧,通过会进行仿真模拟训练,但进行实操时还是不熟练,任然容易出现无人机撞到障碍物、倾斜落地等等失误操作,无人机一旦撞到障碍物或者倾斜掉落,就容易损坏,尤其是旋翼最容易损坏,导致无人机的维修成本高,因此设计一种防损坏的无人机用于新手培训非常有必要。
技术实现要素:
4.本发明的目的是提供一种培训用防损坏无人机,在飞行过程中能够进行自动避障,即使撞到障碍物或者掉落也能够充分保护无人机主体及旋翼不受损坏,降低无人机的维修成本。
5.本发明的上述技术目的是通过以下技术方案得以实现的:
6.一种培训用防损坏无人机,包括机体,所述机体内设置有电池、控制电路板、陀螺仪传感器、加速度计、无线传输模块及gps,所述机体的下端及四周均设置有测距传感器,所述机体的四周向外设置有多根机臂,每一机臂自由端的上端均安装有电机,每一电机的上端均安装有旋翼,所述电池、所述陀螺仪传感器、所述加速度计、所述无线传输模块、所述gps及每一电机均与所述控制电路板电连;
7.每一机臂的自由端于对应电机的下方均设置有外端开口的条形减震壳,每一条形减震壳内靠近所述机体的一端均向外设置有两条呈上下相对设置的金属弹片,每一金属弹片的中部均设置有弧形段,两条相对的金属弹片的弧形段呈相对设置且弧度向外,每一条形减震壳内均设置有与对应两条金属弹片连接的支撑臂,每一支撑臂的上下与对应条形减震壳的内壁之间均有间隙,每一支撑臂均伸出对应条形减震壳连接有弧形支撑条,每一弧形支撑条均呈竖向设置且弧度向外。
8.通过采用上述技术方案,学员进行无人机操作时,当无人机要撞到障碍物,或者将要倾斜落地时,测距传感器检测到与障碍物或底面的距离,通过陀螺仪传感器与加速度计配合计算无人机会不会撞到障碍物或底面,若计算得出会撞到,则采取自动避障或自动悬停,避免撞到障碍物或底面;
9.若飞行过程中还是不可避免的撞到障碍物或底面时,首先是弧形支撑条与障碍物或底面接触,避免无人机主体及旋翼与障碍物或底面接触,并且弧形支撑条撞到后会使得支撑臂相对于条形减震壳上下运动压缩金属弹片达到减震的效果,减轻撞击力对无人机主
体及旋翼的冲击,若是受撞击后支撑臂垂直向后时,则会使得金属弹片的弧形段被压缩达到减震,最终减轻对无人机主体及旋翼的冲击,有效防止无人机损坏,降低培训用无人机的维修成本。
10.本发明的进一步设置为:每一支撑臂的长度均满足:相邻两条弧形支撑条接触地面时,所述旋翼不接触地面。
11.通过采用上述技术方案,使得旋翼受撞击时不会被直接接触障碍物或底面,避免旋翼损坏。
12.本发明的进一步设置为:每一支撑臂远离对应弧形支撑条的一端均开设有两个与所述金属弹片配合可拆卸连接的插孔。
13.本发明的进一步设置为:每一支撑臂的左右两侧均与对应条形减震壳的内壁相接触。
14.与现有技术相比,本发明具有以下有益效果:
15.其一、本发明通过机体周围的测距传感器测量与障碍物或底面的距离,并且通过陀螺仪传感器与加速度计配合计算无人机会不会撞到障碍物或底面,从而实现自动避障或自动悬停,避免撞到障碍物或底面;
16.其二、本发明通过机臂外的弧形支撑条保护无人机主体及旋翼,发生撞击时,无人机主体及旋翼不会直接与障碍物或底面接触,有效防止无人机主体及旋翼受撞击损坏;
17.其三、本发明在弧形支撑条受撞击时能够通过金属弹片实现减震,减轻撞击对无人机主体及旋翼产生的冲击,有效防止无人机内部松动及旋翼损坏;
18.其四、无人机落地时,首先是弧形支撑条的下端落地,使支撑板向上挤压金属弹片实现简单,使无人机达到落地减震的效果。
附图说明
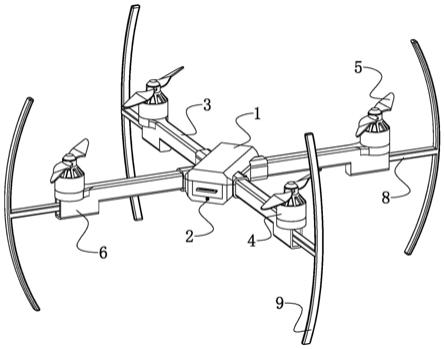
19.图1是本发明的整体结构示意图;
20.图2是用于展示机体内部结构的爆炸图;
21.图3主要用于展示支撑臂与金属弹片的连接。
22.图中:1、机体;11、电池;12、控制电路板;13、陀螺仪传感器;14、加速度计;15、无线传输模块;16、gps;2、测距传感器;3、机臂;4、电机;5、旋翼;6、条形减震壳;7、金属弹片;71、弧形段;8、支撑臂;81、插孔;9、弧形支撑条。
具体实施方式
23.以下结合附图对本发明作进一步详细说明。
24.实施例,参照图1
‑
3,一种培训用防损坏无人机,包括机体1,机体1内设置有电池11、控制电路板12、陀螺仪传感器13、加速度计14、无线传输模块15及gps16,机体1的下端及四周均设置有一个测距传感器2,机体1的四周向外设置有四根机臂3,每一机臂3自由端的上端均安装有一台电机4,每一电机4的上端均安装有一个旋翼5,电池11、陀螺仪传感器13、加速度计14、无线传输模块15、gps16及每一电机4均与控制电路板12电连。
25.每一机臂3的自由端于对应电机4的下方均设置有一个外端开口的条形减震壳6,每一条形减震壳6内靠近机体1的一端均向外设置有两条呈上下相对设置的金属弹片7,每
一金属弹片7的中部均设置有一段弧形段71,两条相对的金属弹片7的弧形段71呈相对设置且弧度向外,每一条形减震壳6内均设置有一根与对应两条金属弹片7连接的支撑臂8,每一支撑臂8的上下与对应条形减震壳6的内壁之间均有间隙,每一支撑臂8的左右两侧均与对应条形减震壳6的内壁相接触,使支撑臂8能够上下减震运动,每一支撑臂8均伸出对应条形减震壳6连接有一条弧形支撑条9,每一弧形支撑条9均呈竖向设置且弧度向外,每一支撑臂8远离对应弧形支撑条9的一端均开设有两个与金属弹片7配合可拆卸连接的插孔81,每一支撑臂8的长度均满足:相邻两条弧形支撑条9接触地面时,旋翼5不接触地面。
26.原理:学员进行无人机操作时,当无人机要撞到障碍物,或者将要倾斜落地时,测距传感器2检测到与障碍物或底面的距离,通过陀螺仪传感器13与加速度计14配合计算无人机会不会撞到障碍物或底面,若计算得出会撞到,则采取自动避障或自动悬停,避免撞到障碍物或底面;
27.若飞行过程中还是不可避免的撞到障碍物或底面时,首先是弧形支撑条9与障碍物或底面接触,避免无人机主体及旋翼5与障碍物或底面接触,并且弧形支撑条9撞到后会使得支撑臂8相对于条形减震壳6上下运动压缩金属弹片7达到减震的效果,减轻撞击力对无人机主体及旋翼5的冲击,若是受撞击后支撑臂8垂直向后时,则会使得金属弹片7的弧形段71被压缩达到减震,最终减轻对无人机主体及旋翼5的冲击,有效防止无人机损坏,降低培训用无人机的维修成本。
28.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。