1.本发明属于加油无人机技术领域,具体涉及一种复合动力重直起降无人加油机。
背景技术:
2.空中加油机即专门给正在飞行中的飞机和直升机补加燃料的飞机。使受油机增大航程,并且延长续航时间,增加有效载重,提高远程作战能力。空中加油机多由大型运输机或战略轰炸机改装而成,加油设备大多装在机身尾部或机翼下吊舱内,由飞行员或加油员操纵。
3.世界第一款也是唯一一款无人加油机即美国波音公司研发的mq25无人机,mq25无人机已经进行了多次的加油实验,未来mq25无人机将装备给美国海军加入到航母编队,为舰载机进行空中加油。可使航母舰载机作战效率大大提高,而且作战半径的增加,在很大程度上也提升了航母编队的安全性。但是,mq25无人机不可以垂直起降,不能在航母等设施上快速的起飞,对于及时迅速的进行加油等方面还是存在一定的缺点。
4.目前国内的空中加油机,基本上都采用运输机等大型飞机进行改造的加油机进行加油,因此存在很多的缺点。其中第一个缺点就是改造花费费用高昂,技术复杂。第二个缺点,就是大型的加油机不能进行垂直起降,对于起降场地的要求较高,不能及时的进行空中加油作业,降低了空中加油作业的效率。
技术实现要素:
5.本发明的目的是提供一种复合动力重直起降无人加油机,该无人机在保证可以进行空中加油的条件下,还要保证其在起飞和着陆的过程中可以垂直起降,且在正常飞行的情况下可以利用机翼上的小型涡喷发动机进行更加快速的飞行,能够实现高速高效的飞行。
6.本发明所采用的技术方案是,一种复合动力重直起降无人加油机,包括机身,机身的两侧对称分布有机翼;机身的前端设置有光电吊舱、尾端设置有涡喷发动机、下方设置有挂架,挂架上挂载有电子干扰吊舱;在涡喷发动机的两侧对称设置有尾翼;机身内设置有隔板和储油罐托盘,其中储油罐托盘将机身内部分为上下两层,上层设置有储油罐,下层设置有起落架舱、输油泵、飞行控制器和蓄电池组,输油泵通过导线连接飞行控制器和蓄电池组;隔板将相邻的储油罐分隔开来;
7.机身上方还设置有机载雷达天线和机载通信天线。
8.本发明的特点还在于,
9.位于机身前端的隔板上设置有光电吊舱基座,光电吊舱安装在光电吊舱基座上。
10.储油罐包括沿机身长度方向从前向后依次排列的储油罐a、储油罐b和储油罐c;其中储油罐a和储油罐c为加油吊舱提供燃油,为受油机进行加油,中间的储油罐b为机体提供燃油;其中储油罐a和储油罐c通过输油管连接在输油泵上,储油罐b通过输油管并联后连接在分油器上给机身尾部安装的涡喷发动机和机翼下方安装的小型涡喷发动机提供燃油,
11.涡喷发动机的前端设置有进气口,涡喷发动机的后端设置有喷口,涡喷发动机的进油口通过输油管与储油罐b相连接。
12.机翼包括与机身连接的翼根、远离机身的翼端,翼端为上翘结构;机翼的后侧设置有襟翼,其中襟翼由襟翼步进电机驱动,翼端上设置有航行灯,机翼的下方设置有挂架,其中挂架可挂载不同的用途设备;机翼下方还设置有发动机机翼连接臂,其中发动机机翼连接臂的前端设置有小型涡喷发动机,发动机机翼连接臂下方的后端设置有摄像头基座或者毫米波雷达基座,其中摄像头基座上安装有红外摄像头,毫米波雷达基座上安装有毫米波雷达;襟翼步进电机、红外摄像头、毫米波雷达分别通过导线与飞行控制器和蓄电池组连接。
13.小型涡喷发动机通过旋转臂和旋转电机与发动机机翼连接臂相连接,旋转臂固定在小型涡喷发动机上,旋转电机固定在发动机机翼连接臂上,旋转臂上刻有与旋转电机上配套齿轮相互啮合的齿;
14.发动机机翼连接臂和小型涡喷发动机的之间还安装有电推杆a,小型涡喷发动机在旋转电机和电推杆a的双重保障下绕着发动机机翼连接臂的前端转动,使无人机可以垂直起降;旋转电机和电推杆a分别通过导线连接飞行控制器和蓄电池组。
15.尾翼包括前缘、后缘以及远离机身的翼尖,其中后缘处设置有方向舵,方向舵通过方向舵步进电机驱动,方向舵步进电机的前端还设置有激光雷达基座,激光雷达基座上安装有激光雷达,方向舵步进电机和激光雷达分别通过导线连接飞行控制器和蓄电池组。
16.涡喷发动机和小型涡喷发动机两部分作为供能模块,其中小型涡喷发动机转动到与地面垂直时可以使无人机进行垂直起降,涡喷发动机与蓄电池组相连,其中蓄电池组和飞行控制器能够为光电吊舱、电子干扰吊舱、机载雷达天线、机载通信天线、襟翼步进电机、旋转电机、电推杆a、航行灯、红外摄像头、毫米波雷达、加油吊舱、方向舵步进电机、激光雷达提供电能以及控制,其中机载通信天线通过无线传输连接地面控制站,红外摄像头和光电吊舱模块连接地面控制站。
17.本发明的有益效果是:
18.(1)弥补了我国在空中无人加油机领域的空白。
19.(2)可以实现垂直起降,减小了对起降场地的要求,提高加油作业的效率。
20.(3)在飞行过程中,小型涡喷发动机可以和主发动机配合,从而获得更高的速度。
附图说明
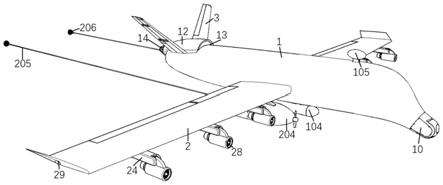
21.图1是本发明一种复合动力重直起降无人加油机的结构示意图;
22.图2是本发明一种复合动力重直起降无人加油机的垂直起降的结构示意图;
23.图3是本发明一种复合动力重直起降无人加油机的内部结构示意图;
24.图4是本发明一种复合动力重直起降无人加油机的油管连接示意图;
25.图5是本发明一种复合动力重直起降无人加油机的机翼发动机垂直结构示意图;
26.图6是本发明一种复合动力重直起降无人加油机的仰视结构示意图;
27.图7是本发明一种复合动力重直起降无人加油机的红外摄像头的结构示意图;
28.图8是本发明一种复合动力重直起降无人加油机的红米波雷达的结构示意图;
29.图9是本发明一种复合动力重直起降无人加油机的发动机机翼连接臂与涡喷发动
机连接结构示意图;
30.图10是本发明一种复合动力重直起降无人加油机的尾翼结构示意图;
31.图11是本发明一种复合动力重直起降无人加油机的起落架结构示意图;
32.图12是本发明一种复合动力重直起降无人加油机的起落架舱门与起落架舱连接示意图;
33.图13是本发明一种复合动力重直起降无人加油机的控制电路图;
34.图14是本发明一种复合动力重直起降无人加油机的垂直起降示意图。
35.图中,1.机身,2.机翼,3.尾翼,4.起落架;
36.10.光电吊舱,11.光电吊舱基座,12.涡喷发动机,13.进气口,14.喷口,15.起落架舱,16.储油罐托盘,17.隔板,18.储油罐a,19.储油罐b,100.储油罐c,101.输油泵,102.输油管,103.挂架,104.电子干扰吊舱,105.机载雷达天线,106.机载通信天线,107.飞行控制器,108.蓄电池组;
37.20.翼根,21.翼端,22.襟翼,23.襟翼步进电机,24.发动机机翼连接臂,25.旋转电机,26.旋转臂,27.电推杆a,28.小型涡喷发动机,29.航行灯,200.摄像头基座,201.红外摄像头,202.毫米波雷达基座,203.毫米波雷达,204.加油吊舱,205.输油软管,206.锥套;
38.30.方向舵,31.方向舵步进电机,32.前缘,33.后缘,34.翼尖,35.激光雷达基座,36.激光雷达;
39.40.起落架舱门,41.起落架舱门电动组件,41
‑
1.起落架舱门步进电机,41
‑
2.旋转臂a,41
‑
3.旋转臂b,41
‑
4.舱门连接臂,42.电推杆b,43.液压杆旋转轴,44
‑
1.支撑臂a,44
‑
2.支撑臂b,45.支撑臂旋转轴,46
‑
1.锁死臂a,46
‑
2,锁死臂b,47.立柱,48.立柱旋转轴,49.减震弹簧,400.机轮。
具体实施方式
40.下面结合附图和具体实施方式对本发明进行详细说明。
41.如图1
‑
3所示,一种复合动力重直起降无人加油机,包括机身1,机身1的前端通过隔板17上安装的光电吊舱基座11设置有光电吊舱10,机身1上方设置有机载雷达天线105和机载通信天线106,机身1尾部安装有喷气发动机12和尾翼3,机身1的两侧对称分布有机翼2,机身1的下方设置有挂架103,其中挂架103上挂载有电子干扰吊舱104,机身1内部包括隔板17和储油罐托盘16,其中储油罐托盘16将机身1内部分为上下两层,其中上层设置有储油罐,下层设置有起落架舱15、输油泵101、输油管102、飞行控制器107、蓄电池组108等设备。
42.涡喷发动机12的前端设置有进气口13,涡喷发动机12的后端设置有喷口14,其中涡喷发动机12的进油口通过输油管102连接在储油罐b19上。
43.如图4所示,机身1内部包括有储油罐,其中前端的储油罐a18和后端的储油罐c100为加油吊舱204提供燃油,为受油机进行加油,中间的储油罐b19为机体提供燃油,其中储油罐a18和储油罐c100通过输油管102连接在输油泵101上,输油泵101通过输油管102连接在挂架103的预留接口上,储油罐b19通过输油管102并联后连接在分油器上给机身1尾部安装的涡喷发动机12和机翼2下方安装的小型涡喷发动机28提供燃油,其中输油泵101通过导线连接飞行控制器107和蓄电池组108。
44.如图5
‑
8所示,机翼2包括与机身1连接的翼根20、远离机身1的翼端21,翼端21为上
翘结构;机翼2的后侧设置有襟翼22,其中襟翼22通过襟翼步进电机23转动,翼端21上设置有航行灯29,机翼2的下方设置有挂架103,其中挂架103可以根据不同的用途挂载加油吊舱204等设备,还设置有发动机机翼连接臂24,其中发动机机翼连接臂24的前端设置有小型涡喷发动机28,发动机机翼连接臂24下方的后端设置有摄像头基座200或者毫米波雷达基座202,其中摄像头基座200上安装有红外摄像头201,毫米波雷达基座202上安装有毫米波雷达203,襟翼步进电机23、红外摄像头201、毫米波雷达203别通过导线连接飞行控制器107和蓄电池组108。
45.如图9所示,其中小型涡喷发动机28上包括有旋转臂26,旋转臂26铰接在发动机机翼连接臂24的前端,其中旋转臂26上刻有与旋转电机25上配套的齿轮相互啮合的齿,发动机机翼连接臂24和小型涡喷发动机28的外壳上还安装有电推杆a27,小型涡喷发动机28在旋转电机25和电推杆a27的双重保障下绕着发动机机翼连接臂24的前端转动,使无人机可以垂直起降,旋转电机25和电推杆a27分别通过导线连接飞行控制器107和蓄电池组108。
46.如图10所示,尾翼3包括前缘32和后缘33,以及远离机身1的翼尖34,其中后缘33处设置有方向舵30,方向舵30通过方向舵步进电机31转动,方向舵步进电机31的前端还设置有激光雷达基座35,激光雷达基座35上安装有激光雷达36,其中方向舵30在飞行作业过程中配合机身1动力系统工作,方向舵步进电机31和激光雷达36分别通过导线连接飞行控制器107和蓄电池组108。
47.如图11所示,起落架舱15内设置有起落架4,起落架4包括固定安装在起落架舱15内的液压杆旋转轴43、支撑臂旋转轴45以及立柱旋转轴48;液压杆旋转轴43上铰接有电推杆b42、支撑臂旋转轴45上铰接有支撑臂a44
‑
1、立柱旋转轴48上铰接立柱47;电推杆b42的另一端铰接在立柱47上部,支撑臂a44
‑
1的另一端共同铰接有支撑臂b44
‑
2和锁死臂a46
‑
1,锁死臂a46
‑
1的另一端铰接有锁死臂b46
‑
2,并且锁死臂b46
‑
2铰接在电推杆b42与立柱47连接的铰链上,支撑臂b44
‑
2另一端铰接在立柱47下部,立柱47另一端安装有减震弹簧49,减震弹簧49远离机身1的一侧安装有机轮400,电推杆b42通过导线连接飞行控制器107和蓄电池组108。
48.如图12所示,起落架舱15外铰接有起落架舱门40,起落架舱门40为两片对开门结构,其中门板40与起落架舱14通过铰链铰接,门板40与起落架舱14上还安装有起落架舱门电动组件41,其中起落架舱门电动组件41包括起落架舱门步进电机41
‑
1,起落架舱门步进电机41
‑
1安装在起落架舱14的内壁上,起落架舱门步进电机41
‑
1上固定连接有旋转臂a41
‑
2,旋转臂a41
‑
2的另一端铰接有旋转臂b41
‑
3,旋转臂b41
‑
3的另一端铰接有基座41
‑
4,其中基座41
‑
4固定在门板40上,起落架舱门步进电机41
‑
1通过导线连接飞行控制器107和蓄电池组108。
49.如图13所示,本发明供能模块包括涡喷发动机12和小型涡喷发动机28两部分,其中小型涡喷发动机28转动到与地面垂直时可以使无人机进行垂直起降,其中安装在机身1尾部的涡喷发动机12的发电机可以产生电能,其产生的电能可以为蓄电池组108充电,其中蓄电池组108和飞行控制器107可以为光电吊舱10、电子干扰吊舱104、机载雷达天线105、机载通信天线106、襟翼步进电机23、旋转电机25、电推杆a27、航行灯29、红外摄像头201、毫米波雷达203、加油吊舱204、方向舵步进电机31、激光雷达36、起落架舱门步进电机41
‑
1提供电能和控制,其中机载通信天线106通过无线传输连接地面控制站,红外摄像头201和光电
吊舱10通过图传模块连接地面控制站。
50.如图14所示,本发明的一种复合动力重直起降无人加油机的垂直起降过程为:
51.起飞:机翼2下通过发动机机翼连接臂24安装的小型涡喷发动机28通过旋转电机25和电推杆a27转动到与机翼2垂直的位置,小型涡喷发动机28启动,无人机开始缓缓垂直上升,上升到一定高度后,起落架4收回起落架舱15中,起落架舱门40关闭,无人机的涡喷发动机12启动,无人机开始往前飞行,在飞行的过程中小型涡喷发动机28停机,然后在旋转电机25和电推杆a27的作用下慢慢转回与机翼2平行的状态,垂直起飞过程完成。
52.降落:加油任务完毕后,返航到达降落地点,小型涡喷发动机28在旋转电机25和电推杆a的作用下开始转动到与机翼2垂直的位置,涡喷发动机28停车的同时小型涡喷发动机28启动,开始缓缓垂直降落,当无人机离地面到一定距离时,起落架4下落直至降落到地面,小型涡喷发动机28停车,小型涡喷发动机28在旋转电机25和电推杆a的作用下转回与机翼2平行的位置,垂直降落过程完成。
53.以下以一个实例来说明本发明的作业全过程:
54.无人机到达起飞地点,地面控制站的指挥人员发送起飞指令,通过机载通信天线106将该指令发送至飞行控制器107,飞行控制器107将指令处理后发送相应的作业设备及蓄电池组108,蓄电池组108开始供电,发动机机翼连接臂24中的旋转电机25和电推杆a27开始工作,将小型涡喷发动机28转动到与机翼2垂直的位置,小型涡喷发动机28启动,无人机开始垂直上升,在离地一段距离后,起落架4收回起落架舱15中,起落架舱门40关闭,上升到一定高度后,无人机的涡喷发动机12启动开始往前飞行,在飞行的过程中小型涡喷发动机28停机,然后在旋转电机25和电推杆a27的带动下慢慢转回与机翼2平行的状态,需要更快的速度时,小型涡喷发动机28启动开始为无人机提供动力,到达加油地点后,无人机机翼2下挂载的加油吊舱204中的输油软管205和锥套206开始释放,当锥套206上的加油接头与受油机上的受油接口对接后,开始加油,加油结束后,输油软管205和锥套206收回到加油吊舱204中,无人机开始返航,到达降落地点后,小型涡喷发动机28在旋转电机25和电推杆a的带动下开始转动到与机翼垂直的位置,涡喷发动机28停车的同时小型涡喷发动机28启动,开始逐渐降落,当无人机离地面到一定距离时,起落架4下落直至降落到地面,小型涡喷发动机28停车,小型涡喷发动机28转回与机翼平行的位置,任务结束。