1.本实用新型属于无人机技术领域,具体为一种电力工程输电线路巡检无人机装置。
背景技术:
2.无人机通常是指利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行设备,为了方便从高空拍摄或对线路上进行巡检常常会使用无人机来完成。
3.现在市场上无人机一般在线路巡检时,经常因天气状况导致无人机在飞行时稳定性较差,因无人机的扇叶一般时固定角度进行飞行,无法有效的对扇叶的角度进行调节,导致无人机的适应能力较差,容易因风阻产生侧翻现象,为此,我们提出了一种电力工程输电线路巡检无人机装置。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种电力工程输电线路巡检无人机装置,有效的解决了无人机的扇叶一般时固定角度进行飞行,无法有效的对扇叶的角度进行调节,导致无人机的适应能力较差,容易因风阻产生侧翻现象的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种电力工程输电线路巡检无人机装置,包括机身,所述机身的外径均设置有支撑架,所述支撑架的内部设置有驱动电机,所述驱动电机的传动轴连接有扇叶机构,所述机身的底部设置有夹持机构;
6.所述扇叶机构包括壳体,所述壳体的底部与所述驱动电机的传动轴相连接,所述壳体的内部设置有梯形齿轮,所述壳体的内部均匀设置有作用齿块,所述作用齿块与所述梯形齿轮相啮合,所述作用齿块的外径均设置有扇叶,所述梯形齿轮的上部设置有转动栓。
7.优选的,所述夹持机构包括滑动架,所述滑动架的上部与所述机身的底部相连接,所述滑动架的内部设置有滑块,所述滑动架的内部设置有调节螺杆,所述调节螺杆与两组所述滑块相螺接,所述滑块的底部设置有夹持块。
8.优选的,所述夹持块的内部开设有限定槽,所述限定槽的形状呈弧形设置,且所述限定槽的内部设置有缓冲垫。
9.优选的,所述机身的形状呈八菱形设置,所述作用齿块呈三棱形设置,且所述支撑架分四组均固定连接在所述机身的四角。
10.优选的,所述壳体的外侧面均设置有轴承,所述作用齿块通过轴承固定在所述壳体的内部。
11.优选的,所述壳体的上部设置有第一齿块,所述转动栓的内部设置有缓冲簧,所述缓冲簧的底部设置有第二齿块,所述第二齿块与所述第一齿块相啮合。
12.与现有技术相比,本实用新型的有益效果是:
13.1.通过对扇叶的角度进行调节,可使得无人机更好的进行升起工作,有效的对扇叶风阻进行调节,使得更好的对无人机的飞行速度进行调节,辅助无人机更好的进行飞行
工作,且通过运行驱动电机,带动扇叶机构进行转动,使得无人机进行飞行检测工作,通过上述结构可通过对扇叶的角度调节,从而对无人机在飞行时的风阻进行体调节,避免风阻过大导致无人机飞行时,产生侧翻,辅助更好的对无人机的飞行速度进行调节,可有效的避免扇叶在调节时,扇叶的角度产生偏移,辅助更好的进行角度调节工作;
14.2.通过设置有滑动架,可对滑块的位置进行限定,通过旋转调节螺杆,对滑块的位置进行调节,使得两组滑块向内进行滑动,从而对夹持块的位置进行调节,使得夹持块更好的对摄像装置进行固定;
15.3.通过八棱形设置机身,可有效的减少风阻,辅助无人机更好的进行升起工作,且通过作用齿块,可辅助更好的对无人机涉扇叶的角度进行调节,辅助无人机更好的进行升起工作,且通过设置有四组支撑架,可在升起时,保证无人机的平衡性。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
17.在附图中:
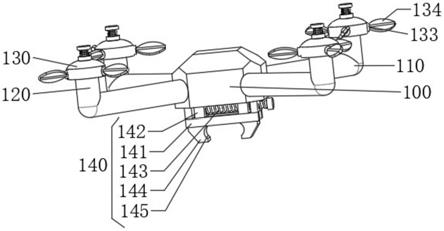
18.图1为本实用新型结构示意图;
19.图2为本实用新型第二轮齿结构示意图;
20.图3为本实用新型梯形齿轮结构示意图。
21.图中:100、机身;110、支撑架;120、驱动电机;130、扇叶机构;131、壳体;132、梯形齿轮;133、作用齿块;134、扇叶;135、转动栓;136、第一齿块;137、缓冲簧;138、第二齿块;140、夹持机构;141、滑动架;142、滑块;143、调节螺杆;144、夹持块;145、限定槽。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例一,由图1、图2与图3给出,一种电力工程输电线路巡检无人机装置,包括机身100,机身100的外径均设置有支撑架110,支撑架110的内部设置有驱动电机120,驱动电机120的传动轴连接有扇叶机构130,机身100的底部设置有夹持机构140;
24.扇叶机构130包括壳体131,壳体131的底部与驱动电机120的传动轴相连接,壳体131的内部设置有梯形齿轮132,壳体131的内部均匀设置有作用齿块133,作用齿块133与梯形齿轮132相啮合,作用齿块133的外径均设置有扇叶134,梯形齿轮132的上部设置有转动栓135。
25.实施例二,由图1给出,夹持机构140包括滑动架141,滑动架141的上部与机身100的底部相连接,滑动架141的内部设置有滑块142,滑动架141的内部设置有调节螺杆143,调节螺杆143与两组滑块142相螺接,滑块142的底部设置有夹持块144,通过设置有滑动架141,可对滑块142的位置进行限定,通过旋转调节螺杆143,对滑块142的位置进行调节,使得两组滑块142向内进行滑动,从而对夹持块144的位置进行调节,使得夹持块144更好的对
摄像装置进行固定。
26.实施例三,由图1给出,夹持块144的内部开设有限定槽145,限定槽145的形状呈弧形设置,且限定槽145的内部设置有缓冲垫,通过设置有限定槽145与缓冲垫,可更好的对摄像装置进行卡接安装工作,更好的对摄像装置进行安装固定工作。
27.实施例四,由图1给出,机身100的形状呈八菱形设置,作用齿块133呈三棱形设置,且支撑架110分四组均固定连接在机身100的四角,通过八棱形设置机身100,可有效的减少风阻,辅助无人机更好的进行升起工作,且通过作用齿块133,可辅助更好的对无人机涉扇叶134的角度进行调节,辅助无人机更好的进行升起工作,且通过设置有四组支撑架110,可在升起时,保证无人机的平衡性。
28.实施例五,由图3给出,壳体131的外侧面均设置有轴承,作用齿块133通过轴承固定在壳体131的内部,通过设置有轴承,可对作用齿块133的位置进行限定,辅助作用齿块133更好的进行转动工作。
29.实施例六,由图2给出,壳体131的上部设置有第一齿块136,转动栓135的内部设置有缓冲簧137,缓冲簧137的底部设置有第二齿块138,第二齿块138与第一齿块136相啮合,通过设置有第一齿块136与第二齿块138,可对转动栓135的位置进行卡接固定,避免转动栓135产生自转现象,且通过设置有缓冲簧137,可对第二齿块138进行缓冲,可更好的对第二齿块138的位置进行调节工作,辅助第二齿块138更好的进行转动工作。
30.工作原理:通过把摄像装置安装在夹持机构140的内部,通过旋转转动栓135带动梯形齿轮132进行转动,通过梯形齿轮132的转动带动作用齿块133进行转动,通过作用齿块133的转动对扇叶134的角度进行调节工作,使得扇叶134进行同步旋转,避免扇叶134的角度不同,导致无人机在升起时,产生倾斜现象,且通过对扇叶134的角度进行调节,可使得无人机更好的进行升起工作,有效的对扇叶134风阻进行调节,使得更好的对无人机的飞行速度进行调节,辅助无人机更好的进行飞行工作,且通过运行驱动电机120,带动扇叶机构130进行转动,使得无人机进行飞行检测工作,通过上述结构可通过对扇叶134的角度调节,从而对无人机在飞行时的风阻进行体调节,避免风阻过大导致无人机飞行时,产生侧翻,辅助更好的对无人机的飞行速度进行调节,可有效的避免扇叶134在调节时,扇叶134的角度产生偏移,辅助更好的进行角度调节工作。
31.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。