1.本发明涉及直升机起落架技术领域,特别涉及一种三足式自适应起落架及其控制方法。
背景技术:
2.澳大利亚昆士兰大学的samuel baker等人于2013年上提出了一种“采用耦合机械设计被动起落架”。该起落架系统主要设计有四条均匀分布的两两对称相连接于一个扩散弹簧锁的两自由度无动力机器人腿,可以适应近15cm高度的阶梯以及倾斜20
°
的斜坡。但被动式起落架过分依赖机械元件性能,且不能实时调整,不论是稳定性还是适应性均有较大限制。
3.2015年美国佐治亚理工学院提出了一种“新型自动起落架”。该套自适应着陆系统采用四条两两对称铰接于机身两侧的两自由度有动力机器人腿代替传统的起落架。该技术能够使直升机在更为崎岖、倾斜的地面以及摇晃角度更大的舰面完成着陆。该自适应起落架采用的二自由度机器人腿具有灵活度高、适应性强等特点。但是电驱动的二自由度机器人腿的承载能力较低,难以支撑起大中型直升机,同时其机械臂式的结构抗冲击性能较差,难以抵抗飞机落地瞬间产生的冲击力。
技术实现要素:
4.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
5.为此,本发明的一个目的在于提出一种三足式自适应起落架。
6.本发明的另一个目的在于提出一种三足式自适应起落架的控制方法。
7.为达到上述目的,本发明一方面实施例提出了三足式自适应起落架,包括:机架、前液压支腿、前电液伺服阀、右液压支腿、右电液伺服阀、左液压支腿、左电液伺服阀和惯性导航仪,其中,所述机架为中位线带梁的等腰梯形结构,所述前液压支腿铰接在所述机架的上底,所述右液压支腿和所述左液压支腿分别铰接在所述机架的下底,所述前电液伺服阀固定在所述机架的上底中心位置,所述右电液伺服阀和左电液伺服阀分别固定在所述机架的下底两端处,所述惯性导航仪固定在所述机架的梁的中心位置。
8.本发明实施例的三足式自适应起落架,采用三足式单自由度液压支腿结构,液压支腿采用平行四边形结构,无自由度冗余,使得系统具有更好的稳定性和可靠性;采用液压缸作为做动元件,力密度大,可以适用于多种型号的舰载直升机,有较为广阔的使用范围;使用激光测距仪和惯性导航仪进行多传感器融合控制,保证系统有更高的可靠性。
9.另外,根据本发明上述实施例的三足式自适应起落架还可以具有以下附加的技术特征:
10.进一步地,在本发明的一个实施例中,所述前液压支腿、所述左液压支腿和所述右液压支腿的结构相同,均包括上连杆、下连杆、液压缸、缓冲装置、激光测距仪和机轮。
11.进一步地,在本发明的一个实施例中,所述上连杆一端铰接在所述机架处,另一端
铰接在所述缓冲装置上端;所述下连杆一端铰接在所述机架处,另一端铰接在所述缓冲装置下端;所述液压缸一端铰接在所述机架处,另一端铰接在所述缓冲装置上端。
12.进一步地,在本发明的一个实施例中,所述上连杆、所述下连杆、所述机架和所述缓冲装置构成平行四边形结构。
13.进一步地,在本发明的一个实施例中,所述激光测距仪固定在所述机轮上端,所述机轮上端与所述缓冲装置连接,构成缓冲吸震机构。
14.为达到上述目的,本发明另一方面实施例提出了三足式自适应起落架的控制方法,包括以下步骤:步骤s1,当直升机处于降落时,利用所述激光测距仪对舰面进行观测,若距舰面高度为h1时,将起落架展开至预设姿态;步骤s2,以预设速率v1下降,当距舰面高度为h2时,根据所述激光测距仪的反馈信息调整所述起落架的各液压缸的伸长量,以保证支腿末端的机轮所组成的平面与舰面保持平行;步骤s3,以预设速度v2下降,直至着舰,立即开启所述惯性导航仪获取起落架的姿态信息,根据所述姿态信息调整所述液压缸长度,使机体始终保持水平,直至直升机被系留。
15.本发明实施例的三足式自适应起落架的控制方法,应用于舰载直升机情况下的运动规划以及相应的控制算法,依据所提出的运动规划方法以及所设计的控制算法,自适应起落架可实现直升机在晃动舰面上安全着舰以及着舰后一段时间内随舰面调整,使机体始终保持平稳的功能。
16.另外,根据本发明上述实施例的三足式自适应起落架的控制方法还可以具有以下附加的技术特征:
17.进一步地,在本发明的一个实施例中,所述着舰时尽量处于舰面近乎水平的时刻,所述着舰包含预判下一个舰面水平时刻,并在距舰面200mm处完成的自由落体。
18.进一步地,在本发明的一个实施例中,所述距舰面高度h1大于所述距舰面高度h2,所述预设速率v1大于所述预设速度v2。
19.进一步地,在本发明的一个实施例中,所述激光测距仪分别测量得到所述机轮到舰面的距离h
i
(i=1、2、3),当其平均距离为h1时,起落架展开至预定姿态,当其平均距离为h2时,将h2作为所述机轮的目标距离,将三个机轮的到舰面距离均调整至同一目标距离,使机轮所在平面与舰面平行,再通过目标距离得到各机轮距地变化量δh
i
,通过运动学解算得到所述液压缸长度l
ii
,并进行调整。
20.进一步地,在本发明的一个实施例中,所述惯性导航仪开启后,获取当前起落架的俯仰角α与翻滚角β,为保证所述机架始终维持在水平状态,通过坐标变换计算得到所述机轮在单腿坐标系z轴方向的变换量δz
i
,然后将δh
i
替换为δz
i
,利用运动学解算流程计算得到所述液压缸的目标长度,并进行调整。
21.本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
22.本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
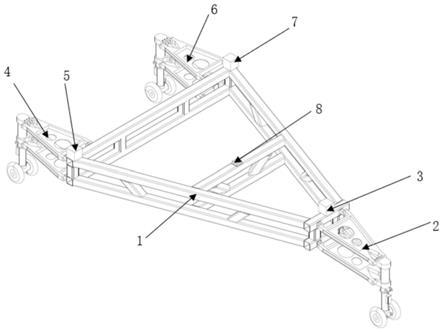
23.图1是本发明一个实施例的三足式自适应起落架的结构示意图;
24.图2是本发明一个实施例的液压支腿结构图;
25.图3是本发明一个实施例的三足式自适应起落架的控制方法的流程图;
26.图4是本发明一个实施例的起落架姿态调整算法的流程图;
27.图5是本发明一个实施例的动态平衡调整算法的流程图。
28.附图标记说明:
[0029]1‑
机架、2
‑
前液压支腿、3
‑
前电液伺服阀、4
‑
右液压支腿、5
‑
右电液伺服阀、6
‑
左液压支腿、7
‑
左电液伺服阀、8
‑
惯性导航仪、9
‑
上连杆、10
‑
下连杆、11
‑
液压缸、12
‑
缓冲装置、13
‑
激光测距仪和14
‑
机轮。
具体实施方式
[0030]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0031]
下面参照附图描述根据本发明实施例提出的三足式自适应起落架及其控制方法,首先将参照附图描述根据本发明实施例提出的三足式自适应起落架。
[0032]
图1是本发明一个实施例的三足式自适应起落架的结构示意图。
[0033]
如图1所示,该三足式自适应起落架包括:机架1、前液压支腿2、前电液伺服阀3、右液压支腿4、右电液伺服阀5、左液压支腿6、左电液伺服阀7和惯性导航仪8。
[0034]
其中,机架1为中位线带梁的等腰梯形结构,激光测距仪前液压支腿200铰接在激光测距仪机架1的上底,激光测距仪右液压支腿4和激光测距仪左液压支腿6分别铰接在激光测距仪机架1的下底,激光测距仪前电液伺服阀3固定在激光测距仪机架1的上底中心位置,激光测距仪右电液伺服阀5和左电液伺服阀7分别固定在激光测距仪机架1的下底两端处,激光测距仪惯性导航仪8固定在激光测距仪机架1的梁的中心位置。
[0035]
进一步地,如图2所示,本发明实施例中前液压支腿2、激光测距仪左液压支腿6和激光测距仪右液压支腿4的结构相同,均包括上连杆9、下连杆10、液压缸11、缓冲装置12、激光测距仪13和机轮14,其中,激光测距仪上连杆9一端铰接在激光测距仪机架1处,另一端铰接在激光测距仪缓冲装置12上端;激光测距仪下连杆10一端铰接在激光测距仪机架1处,另一端铰接在激光测距仪缓冲装置12下端;激光测距仪液压缸11一端铰接在激光测距仪机架1处,另一端铰接在激光测距仪缓冲装置12上端。
[0036]
具体地,当液压缸11在液压伺服阀的控制下伸长或缩短时,缓冲装置12便在由机架1、上连杆9、下连杆10和缓冲装置12组成的平行四边形结构的驱动下实现上下运动,该种运动结构原理可靠性强,保证整个起落架系统有较好的稳定性;同时缓冲装置12为液压缓冲装置,其末端与机轮14铰接保证机轮可以正常转动;在起落架着陆时,机轮14受到冲击,此时缓冲装置12的末端部分收缩至缓冲装置12中,由此抵消冲击,实现平稳降落。另外,为了实现对地距离的实时测量,本发明实施例还在缓冲装置12的末端收缩部分行程之外安装了激光测距仪13。
[0037]
根据本发明实施例提出的三足式自适应起落架,采用三足式单自由度液压支腿结构,液压支腿采用平行四边形结构,无自由度冗余,使得系统具有更好的稳定性和可靠性;采用液压缸作为做动元件,力密度大,可以适用于多种型号的舰载直升机,有较为广阔的使
用范围;使用激光测距仪和惯性导航仪进行多传感器融合控制,保证系统有更高的可靠性。
[0038]
其次参照附图描述根据本发明实施例提出的三足式自适应起落架的控制方法。
[0039]
图3是本发明一个实施例的三足式自适应起落架的控制方法的流程图。
[0040]
如图3所示,该三足式自适应起落架的控制方法,即自适应着舰的运动规划包括以下步骤:
[0041]
在步骤s1中,当直升机处于降落时,利用激光测距仪激光测距仪13对舰面进行观测,若距舰面高度为h1时,将起落架展开至预设姿态。
[0042]
举例而言,针对三足式自适应起落架的舰载直升机,直升机进入降落程序,悬停在距离舰面高度为h1(约2
‑
3m)处,此时启动起落架,利用激光测距仪13对舰面情况进行观测并对舰面情况进行预判,起落架展开至预定姿态。
[0043]
在步骤s2中,以预设速率v1下降,当距舰面高度为h2时,根据激光测距仪激光测距仪13的反馈信息调整激光测距仪起落架的各液压缸11的伸长量,以保证支腿末端的机轮14所组成的平面与舰面保持平行。
[0044]
具体地,直升机以一定速率v1下降,当下降至距离舰面高度为h2(约1m)时,起落架依据激光测距仪13的反馈信息,不断调整各液压缸11的伸长量,保证支腿末端机轮14所组成的平面与舰面保持平行。
[0045]
在步骤s3中,以预设速度v2下降,直至着舰,立即开启激光测距仪惯性导航仪8获取起落架的姿态信息,根据激光测距仪姿态信息调整激光测距仪液压缸11长度,使机体始终保持水平,直至直升机被系留。
[0046]
具体地,直升机继续以较低速度v2下降,直至着舰。着舰时尽量处于舰面近乎水平的时刻,其中,着舰包含预判下一个舰面水平时刻,并在距舰面200mm处完成的自由落体。着舰后,立即开启惯性导航仪8,并依据其反馈的起落架姿态信息,不断调整液压缸11长度,使机体始终保持水平,直至直升机被系留。
[0047]
其中,激光测距仪距舰面高度h1大于激光测距仪距舰面高度h2,激光测距仪预设速率v1大于激光测距仪预设速度v2。
[0048]
进一步地,针对与上述的运动规划,本发明实施例还提出了对起落架姿态调整控制算法和动态平衡调整控制算法,具体如下:
[0049]
如图4所示,起落架姿态调整控制算法为:首先由安装在足端的激光测距仪激光测距仪13分别测量得到激光测距仪机轮14到舰面的距离h
i
(i=1、2、3),当其平均距离为h1时,起落架展开至预定姿态,当其平均距离为h2时,将h2作为激光测距仪机轮14的目标距离,只要将三个机轮的到舰面距离均调整至同一目标距离,则可以认为机轮14所在平面与舰面平行,之后通过目标距离得到各机轮距地变化量δh
i
,通过运动学解算得到激光测距仪液压缸11长度l
ii
,并将其传递给液压伺服控制系统。
[0050]
如图5所示,动态平衡调整算法为:首先由惯性导航仪8获取当前起落架的俯仰角α与翻滚角β(舰面为二维平面,无需测量偏航角γ),之后为保证机架1始终维持在水平状态,通过坐标变换计算得到机轮14在单腿坐标系z轴方向的变换量δz
i
。然后将δh
i
替换为δz
i
,同样利用运动学解算流程计算得到液压缸11的目标长度,并将其传递给液压伺服控制系统。
[0051]
也就是说,上述该三足式自适应起落架的工作流程为:自适应起落架系统依据激
光测距仪13和惯性导航仪8反馈的信息,获取当前起落架系统位姿,并将该位姿信息传递给相应的控制算法,控制算法由此计算得到液压缸11所需伸长量。液压缸11伸长,带动由上连杆10、下连杆11、机架1和缓冲装置12构成平行四边形结构,从而带动机轮14实现抬升动作。根据空间内不共线三点组成一平面的原理,分别控制前液压支腿2、左液压支腿4和右液压支腿6抬升其相应的机轮14,由此即可构成不同的平面,从而实现自适应功能。
[0052]
根据本发明实施例提出的三足式自适应起落架的控制方法,应用于舰载直升机情况下的运动规划以及相应的控制算法,依据所提出的运动规划方法以及所设计的控制算法,自适应起落架可实现直升机在晃动舰面上安全着舰以及着舰后一段时间内随舰面调整,使机体始终保持平稳的功能。
[0053]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0054]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0055]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。