5g网联物流无人机自动空投装置
技术领域
1.本实用新型涉及无人机技术领域,尤其是一种5g网联物流无人机自动空投装置。
背景技术:
2.当前,物流运输主要是以陆路、船舶运输为主,服以航空物流,已经形成非常成熟的产业网络,能够在交通发达的地区达到比较理想的运输效果;但是,一些偏远山区、边防哨所等特殊地区缺少地面交通网络,或当发生地震或泥石流等地质灾害,导致陆路运输瘫痪,尤其是当物资需求紧急或物资时效性要求较高时,这些情况下的物流需求仅凭传统运输难以实现。
3.随着无人驾驶技术的不断深入研究以及5g网络的逐步普及,我国物流行业领军企业已纷纷涉足无人机物流应用领域,采用无人机运输可以在成本同样的条件下实现更高的物流价值,因此,研发一种能与5g网联物流无人机配套使用的自动空投装置显得尤为重要。
技术实现要素:
4.本实用新型的目的在于针对现有技术的情况,提供一种结构合理,重量轻,成本低,空投便捷的5g网联物流无人机自动空投装置。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.5g网联物流无人机自动空投装置,其包括箱体,所述箱体顶部设有用于连接在无人机本体下部的连接件,所述箱体的底板为用于投出物资的底舱门,底舱门一端与箱体左侧铰接,所述箱体底部前后两侧分别设有两个第一舵机,两个第一舵机分别通过第一连杆组件与底舱门另一端两侧铰接,所述底舱门另一端由第一舵机带动靠近或者远离箱体右侧进行底舱门的关闭或者开启,所述箱体右侧设有带插槽的第二舵机,插槽与底舱门另一端设有的插舌插接,插舌和插槽上对应设有插孔,所述第二舵机通过第二连杆组件铰接有插销,插销自由端由第二舵机带动插入或拔出插孔进行底舱门的锁定或者解锁。
7.进一步,所述箱体的前侧板为用于放入物资的前舱门,前舱门一端与箱体左侧铰接,前舱门另一端与箱体右侧通过锁具连接。该前舱门的设计,便于接触式取放物流物资,在无人机飞行或空投期间不打开锁具或前舱门。
8.作为优选,所述锁具为机械锁或者数字密码锁。
9.作为优选,所述底舱门一端与箱体左侧、前舱门一端与箱体左侧均通过铰链铰接。
10.作为优选,所述箱体至少包括一矩形框体、设于矩形框体底部的底板、以及设于矩形框体四周侧的四个侧板,所述底板和四个侧板上均设有镂空。该镂空的设计,不仅可以减小飞行阻力,而且可以减轻箱体自身重量,还有利于降低制作成本。
11.作为优选,所述镂空为圆孔、规则多边形孔或者不规则多边形孔。
12.进一步,所述箱体顶部和左右两侧均设有加强筋。该加强筋的设计,可以对跨度较大的左右两侧进行加强,增强其受力能力,加强筋的数量不是设置越多越好,需要结合箱体体积大小和重量进行设计,较佳的,设置一根加强筋时,将其设于中间位置补强效果好。
13.作为优选,所述连接件上下两端分别设有上卡箍和下卡箍,上卡箍和下卡箍的轴中心线相互垂直。
14.作为优选,所述无人机本体为5g网联物流无人机。
15.作为优选,所述箱体通过连接件可拆卸或者不可拆卸的连接在无人机本体下部左右两侧的两个支撑架,且箱体位于两个支撑架之间。
16.本实用新型采用以上技术方案,在5g网联物流无人机搭载箱体到达指定的空投地点后,外置控制器控制第二舵机转动,第二舵机通过第二连杆组件带动插销自由端从插孔内拔出,使得插舌从第二舵机的插槽内脱离,底舱门处于解锁状态,然后控制两个第一舵机转动,第一舵机通过第一连杆组件带动底舱门另一端向下翻转,使得底舱门另一端远离箱体右侧,底舱门处于开启状态,箱体内物资在自身重力作用下做自由落体运动;物资下落后,外置控制器再控制两个第一舵机转动,第一舵机通过第一连杆组件带动底舱门另一端向上翻转,使得底舱门另一端靠近箱体右侧,插舌插接在插槽内,底舱门处于关闭状态,然后控制第二舵机转动,第二舵机通过第二连杆组件带动插销自由端插入插舌和插槽的插孔内,底舱门处于锁定状态。本实用新型设计合理,结构简单,重量轻,成本低,能够连接在5g网联物流无人机下部进行快速、便捷、精准的空投,为无人机在物流领域的应用提供了重要的配套装置。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本实用新型5g网联物流无人机自动空投装置的一种状态结构示意图;
19.图2为图1状态时的仰视图;
20.图3为本实用新型5g网联物流无人机自动空投装置的另一种状态结构示意图;
21.图4为本实用新型连接件的结构示意图;
22.图5为本实用新型连接在5g网联物流无人机下部时去除部分侧板后的一种状态结构示意图;
23.图6为本实用新型连接在5g网联物流无人机下部时去除部分侧板后的另一种状态结构示意图。
具体实施方式
24.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
25.如图1
‑
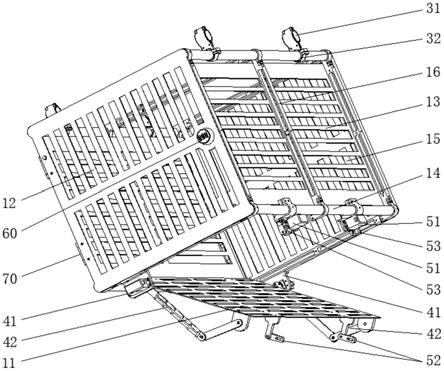
6之一所示,本实用新型的5g网联物流无人机自动空投装置,其包括箱体10,所述箱体10顶部设有用于连接在无人机本体20下部的连接件30,所述箱体10的底板为用于投出物资的底舱门11,底舱门11一端与箱体10左侧铰接,所述箱体10底部前后两侧分
别设有两个第一舵机41,两个第一舵机41分别通过第一连杆组件42与底舱门11另一端两侧铰接,所述底舱门11另一端由第一舵机41带动靠近或者远离箱体10右侧进行底舱门11的关闭或者开启,所述箱体10右侧设有带插槽53的第二舵机51,插槽53与底舱门11另一端设有的插舌52插接,插舌52和插槽53上对应设有插孔,所述第二舵机51通过第二连杆组件铰接有插销54,插销54自由端由第二舵机51带动插入或拔出插孔进行底舱门11的锁定或者解锁。
26.进一步,所述箱体10的前侧板为用于放入物资的前舱门12,前舱门12一端与箱体10左侧铰接,前舱门12另一端与箱体10右侧通过锁具60连接。该前舱门12的设计,便于接触式取放物流物资,在无人机飞行或空投期间不打开锁具60或前舱门12。
27.作为优选,所述锁具60为机械锁或者数字密码锁。
28.作为优选,所述底舱门11一端与箱体10左侧、前舱门12一端与箱体10左侧均通过铰链70铰接。
29.作为优选,所述箱体10至少包括一矩形框体14、设于矩形框体14底部的底板、以及设于矩形框体14四周侧的四个侧板13,所述底板和四个侧板13上均设有镂空15。该镂空15的设计,不仅可以减小飞行阻力,而且可以减轻箱体10自身重量,还有利于降低制作成本。
30.作为优选,所述镂空15为圆孔、规则多边形孔或者不规则多边形孔。
31.进一步,所述箱体10顶部和左右两侧均设有加强筋16。该加强筋16的设计,可以对跨度较大的左右两侧进行加强,增强其受力能力,加强筋16的数量不是设置越多越好,需要结合箱体10体积大小和重量进行设计,较佳的,设置一根加强筋16时,将其设于中间位置补强效果好。
32.作为优选,所述连接件30上下两端分别设有上卡箍31和下卡箍32,上卡箍31和下卡箍32的轴中心线相互垂直。
33.作为优选,所述无人机本体20为5g网联物流无人机。
34.作为优选,所述箱体10通过连接件30可拆卸或者不可拆卸的连接在无人机本体20下部左右两侧的两个支撑架21,且箱体10位于两个支撑架21之间。
35.本实用新型采用以上技术方案,在5g网联物流无人机搭载箱体10到达指定的空投地点后,外置控制器控制第二舵机51转动,第二舵机51通过第二连杆组件带动插销54自由端从插孔内拔出,使得插舌52从第二舵机51的插槽53内脱离,底舱门11处于解锁状态,然后控制两个第一舵机41转动,第一舵机41通过第一连杆组件42带动底舱门11另一端向下翻转,使得底舱门11另一端远离箱体10右侧,底舱门11处于开启状态,箱体10内物资在自身重力作用下做自由落体运动;物资下落后,外置控制器再控制两个第一舵机41转动,第一舵机41通过第一连杆组件42带动底舱门11另一端向上翻转,使得底舱门11另一端靠近箱体10右侧,插舌52插接在插槽53内,底舱门11处于关闭状态,然后控制第二舵机51转动,第二舵机51通过第二连杆组件带动插销54自由端插入插舌52和插槽53的插孔内,底舱门11处于锁定状态。本实用新型设计合理,结构简单,重量轻,成本低,能够连接在5g网联物流无人机下部进行快速、便捷、精准的空投,为无人机在物流领域的应用提供了重要的配套装置。
36.以上所述为本实用新型的较佳具体实施例,应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验所
做的均等变化、修改、替换和变型,皆应在由权利要求书所确定的保护范围内。