1.本发明涉及一种电推轨道转移的点火姿态建立与动态跟踪方法,属于航天器姿态轨道控制领域。
背景技术:
2.采用化学推进与电推进联合变轨,即星箭分离后先采用化学远地点发动机实现多次变轨,将卫星送入一定高度、一定倾角的交接轨道后,利用电推进实现后续转移轨道期间的轨道提升和轨道圆化。电推进轨道提升模式,用于转移轨道使用电推进提升半长轴、减小偏心率和降低轨道倾角。
3.按照电推轨道转移策略,主要分为提升轨道半长轴阶段和轨道圆化阶段,提高轨道半长轴阶段推力沿速度方向(或垂直径向)与轨道角动量构成的平面内,与轨道平面有一定夹角用于调整轨道倾角;轨道圆化阶段推力方向垂直半长轴,同样与轨道平面有一定夹角用于调整轨道倾角。因此,电推变轨目标姿态复杂。
4.由于电推力器推力小,每圈次电推变轨耗时长,弧段可见性复杂,要求星上自主处理流程完备、可靠。同时,电推进用于轨道转移时需工作于高功率大推力模式下,对整星能源要求较高,需满足姿态和帆板联合调整、自动对日以保障能源。将能源角定义为太阳翼法向与太阳方向的夹角,电推轨道转移期间对能源角有明确的精度要求。
技术实现要素:
5.本发明解决的技术问题是:克服现有技术的不足,提出一种电推轨道转移的点火姿态建立与动态跟踪方法,使得点火姿态融合了提高半长轴或减小偏心率的变轨需求、压低轨道倾角的点火方向调整、动态跟踪太阳方向能源需求的多目标要求,能够准确建立电推点火目标姿态,并实现长时有效的姿态对日动态跟踪。
6.本发明解决技术的方案是:
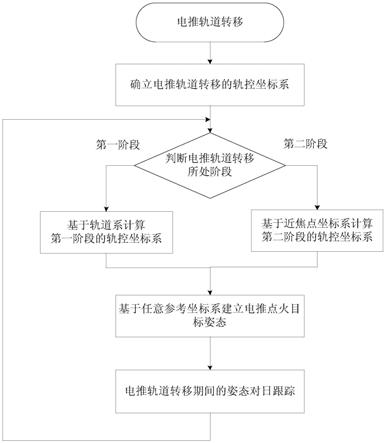
7.一种电推轨道转移的点火姿态建立与动态跟踪方法,步骤包括:
8.(1)确立电推轨道转移两个阶段的轨控坐标系
9.电推轨道转移分为两个阶段,将每个阶段的参考姿态设定为该阶段的轨控坐标系,设电推力器安装于卫星本体系
‑
z面,推力方向沿卫星本体系z轴;
10.(2)基于任意参考坐标系建立电推点火目标姿态
11.在任意参考坐标系基准下,通过解算欧拉角θ
br
,ψ
br
,将其设置为三轴姿态控制的目标姿态角,则可基于任意参考坐标系将卫星控制到电推点火的目标姿态;
12.(3)电推轨道转移期间的姿态对日跟踪
13.经步骤(2)由任意参考坐标系建立电推点火目标姿态后,转为以步骤(1)获得的轨控坐标系为参考坐标系,进行电推轨道转移期间的姿态控制;同时,电推轨道转移期间为满足能源要求,需通过绕点火方向所在轴旋转和绕太阳翼旋转实现太阳翼法向对日;
14.通过姿态对日跟踪和太阳帆板对日转角控制,将太阳帆板法向与太阳方向的夹
角,即能源角,控制到精度要求范围内,满足太阳帆板法向自主对日以保障能源。
15.进一步的,步骤(1)中,实施电推轨道转移,即转移轨道使用电推进提升半长轴、减小偏心率和降低轨道倾角。
16.进一步的,步骤(1)中,第一阶段的轨道转移目标是提高半长轴,同时压倾角,该阶段轨控推力在轨道坐标系的xoooyo平面内,与+xo保持一定夹角,其绝对值不变为ψ1,ψ1范围在0
°‑
90
°
,但在每间隔半个轨道周期时,幅角准确数值根据轨控策略而定,对应幅角在90
°
和270
°
时改变正负。
17.进一步的,第一阶段姿态控制的参考姿态,即轨控坐标系设定为:先绕轨道坐标系的z轴旋转角度ψ1,称为轨控偏航角,再绕轨道坐标系的y轴旋转90
°
,使轨控坐标系的
‑
x轴指地,此时轨控坐标系的+z轴与前进方向的夹角就是所需要的轨控偏航角,其幅值不变,但在幅角为90
°
和270
°
时改变正负。
18.进一步的,步骤(1)中,电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi1
由轨道坐标系c
oi
旋转得到,即
[0019][0020]
其中,ψ1为轨控偏航角。
[0021]
进一步的,步骤(1)中,第二阶段的轨道转移目标是减小偏心率,同时压倾角,该阶段轨控推力在对惯性定向的基础上保持一定轨控夹角,从而进一步调整轨道倾角,其绝对值不变为ψ2,但在幅角为90
°
和270
°
时改变正负。
[0022]
进一步的,步骤(1)中,第一阶段姿态控制的参考姿态,即轨控坐标系基于近焦点坐标系pqw旋转得到。
[0023]
进一步的,近焦点坐标系pqw中,p轴指向轨道的近地点方向、w轴指向轨道正法向,q轴与p轴、w轴构成右手正交坐标系统。
[0024]
进一步的,轨控坐标系与pqw坐标系各轴对应关系为,轨控坐标系x轴对应pqw坐标系
‑
p轴,轨控坐标系y轴对应pqw坐标系
‑
w轴,轨控坐标系z轴对应pqw坐标系
‑
q,转换坐标轴对应关系后,再绕当前坐标系x轴旋转ψ2,即得电推轨道转移第二阶段的轨控坐标系c
ormi2
。
[0025]
进一步的,首先根据轨道要素计算惯性系到pqw坐标系的转换矩阵c
pqwi
[0026][0027]
其中ω为轨道近地点幅角,ω为轨道升交点赤经,i为轨道倾角;
[0028]
进一步可得到电推轨道转移第二阶段的轨控坐标系c
ormi2
,
[0029][0030]
其中:
[0031]
sψ2=sin(ψ2),cψ2=cos(ψ2)
[0032]
sω=sin(ω),cω=cos(ω)
[0033]
si=sin(i),ci=cos(i)
[0034]
sω=sin(ω),cω=(cosω)
[0035]
g
k1
=cω
·
sω+sω
·
cω
·
ci
[0036]
g
k2
=sω
·
sω
‑
cω
·
cω
·
ci。
[0037]
进一步的,步骤(2)中,首先,电推轨道转移的点火姿态建立完毕后,卫星本体系相对参考坐标系的姿态转换矩阵c
br
应满足
[0038]
c
br
·
c
ri
=c
ormi1
或c
br
·
c
ri
=c
ormi2
[0039]
其中c
ri
为惯性系到参考坐标系的姿态转换矩阵,设卫星在参考坐标系下的三轴姿态欧拉角为θ
br
,ψ
br
,则有
[0040]
或
[0041]
对电推轨道转移第一阶段建立电推点火目标姿态时,令
[0042][0043]
对电推轨道转移第二阶段建立电推点火目标姿态时,令
[0044][0045]
给定欧拉角转序,即可由c
br
求取θ
br
,ψ
br
。
[0046]
进一步的,当欧拉转动顺序为3
‑2‑
1时,
[0047][0048][0049]
ψ
br
=tan2
‑1(c
12
,c
11
)∈[
‑
π,π]
[0050]
其中函数tan2
‑1(y,x)定义为
[0051][0052]
当欧拉转动顺序为3
‑1‑
2时,
[0053][0054]
θ
br
=tan2
‑1(
‑
c
13
,c
33
)∈[
‑
π,π]
[0055]
ψ
br
=tan2
‑1(
‑
c
21
,c
22
)∈[
‑
π,π]
[0056]
其余欧拉转动顺序同理。
[0057]
进一步的,如果电推轨道转移处于第一阶段,则点火姿态基于轨道系基准,太阳方向时变,为跟踪能源需实现姿态动态偏置,即转移轨道电推进变轨期间,卫星+z轴指向轨控推力方向,当需要帆板指向太阳时,本体系绕轨控坐标系z轴旋转一定的角度,使卫星的xoz平面与太阳方向和推力方向组成的平面重合。
[0058]
进一步的,根据当前星时和太阳星历计算得到太阳矢量在惯性坐标系的表达s
i
,经电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi1
,将太阳矢量表达于第一阶段的轨控坐标系,即
[0059]
s
orm1
=[s
orm1x s
orm1y s
orm1z
]
t
=c
ormi1
·
s
i
[0060]
则姿态控制目标在第一阶段轨控坐标系的基础上,绕轨控坐标系z轴偏置角度ψ
d
为ψ
d
=tan2
‑1(s
orm1y
,s
orm1x
)∈[
‑
π,π]。
[0061]
进一步的,如果电推轨道转移处于第二阶段,则点火姿态基于惯性系基准,太阳矢量方向短期内固定,因而为保障能源的姿态偏置角也固定,即转移轨道电推进变轨期间,卫星+z轴指向轨控推力方向,当需要帆板指向太阳时,本体系绕轨控坐标系z轴旋转一定的角度,使卫星的xoz平面与太阳方向和推力方向组成的平面重合。
[0062]
进一步的,根据当前星时和太阳星历计算得到太阳矢量在惯性坐标系的表达s
i
,经电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi2
,将太阳矢量表达于第一阶段的轨控坐标系,即
[0063]
s
orm2
=[s
orm2x s
orm2y s
orm2z
]
t
=c
ormi2
·
s
i
[0064]
则姿态控制目标在第一阶段轨控坐标系的基础上,绕轨控坐标系z轴偏置角度ψ
d
为ψ
d
=tan2
‑1(s
orm2y
,s
orm2x
)∈[
‑
π,π]。
[0065]
进一步的,卫星本体系定义为:以卫星某特征点为原点,x轴和z轴都沿航天器特征轴方向,y轴与z轴和x轴垂直,且构成右手正交坐标系,卫星在轨道系零姿态时本体系x、y、z轴方向与轨道坐标系xo、yo、zo轴方向重合;
[0066]
轨道坐标系定义为:原点oo为卫星质心,zo轴指向地心,xo轴在卫星轨道平面内,垂直于zo轴,指向卫星飞行方向,yo轴与zo轴和xo轴垂直,且构成右手正交坐标系。
[0067]
本发明与现有技术相比的有益效果是:
[0068]
(1)现有技术主要针对电推轨道转移的变轨策略优化问题,而在实施电推轨道转移控制的实际应用中,还有许多需要考虑的工程问题;按照电推轨道转移策略,主要分为提升轨道半长轴阶段和轨道圆化阶段,提高轨道半长轴阶段推力沿速度方向(或垂直径向)与轨道角动量构成的平面内,与轨道平面有一定夹角用于调整轨道倾角;轨道圆化阶段推力方向垂直半长轴,同样与轨道平面有一定夹角用于调整轨道倾角。因此,电推变轨目标姿态复杂,本发明针对电推进轨道转移期间的复杂姿态控制问题,提出了一种电推轨道转移的点火姿态建立与动态跟踪方法,划分不同轨控阶段以确立电推轨道转移的轨控坐标系,可基于任意参考坐标系准确建立电推点火目标姿态,同时满足电推进轨道转移期间的多目标姿态控制需求,包括提高半长轴或减小偏心率的变轨需求、压低轨道倾角的点火方向调整需求;
[0069]
(2)本发明在电推轨道转移不同阶段的轨控坐标系基础上,通过绕轨控推力方向所在轴的姿态偏置,有效保持点火过程姿态跟踪对日平面,满足姿态跟踪太阳方向的能源需求,创新性地解决了电推点火期间多目标的姿态控制问题,即同时满足提高半长轴或减小偏心率的变轨需求、压低轨道倾角的点火方向调整需求、以及动态跟踪太阳方向的能源需求,为实现电推进轨道转移期间的精准姿态控制提供了有效的技术手段;
[0070]
(3)本发明方法已成功实现工程应用,在轨验证基于该方法可准确建立电推点火目标姿态,并实现长时有效的姿态对日动态跟踪,有力地促进了电推进轨道转移技术在各类航天器上的工程应用。利用电推进高比冲的显著优势,可以大幅减少航天器推进剂携带量。随着对航天器承载能力要求不断提高和电推进技术水平的不断进步,越来越多的航天器将配备电推进系统,本发明提出的电推轨道转移的点火姿态建立与动态跟踪方法,提供了电推轨道转移期间融合多目标需求的点火目标姿态建立方法,并确保电推轨道转移期间满足能源对日需求,具有较强的应用效能和市场竞争力。
附图说明
[0071]
图1为本发明方法流程图。
具体实施方式
[0072]
下面结合实施例对本发明作进一步阐述。
[0073]
下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供该实施例是为了能够更透彻地理解本发明,并且能够将本发明的方法完整的传达给本领域的技术人员。下面将参考附图并结合实施例来详细说明本发明。
[0074]
本发明提供一种电推轨道转移的点火姿态建立与动态跟踪方法,如图1所示,步骤如下:
[0075]
首先进入步骤(1)确立电推轨道转移两个阶段的轨控坐标系。
[0076]
实施电推轨道转移,即转移轨道使用电推进提升半长轴、减小偏心率和降低轨道倾角。电推轨道转移可分为两个阶段,将每个阶段的参考姿态设定为改阶段的轨控坐标系。一般而言,电推力器安装于卫星本体系
‑
z面,推力方向沿卫星本体系z轴。
[0077]
卫星本体系定义为:以卫星某特征点为原点,x轴和z轴都沿航天器特征轴方向,y轴与z轴和x轴垂直,且构成右手正交坐标系。本文中卫星在轨道系零姿态时本体系x、y、z轴方向与轨道坐标系xo、yo、zo轴方向重合。
[0078]
其中轨道坐标系定义为:原点oo为卫星质心,zo轴指向地心,xo轴在卫星轨道平面内,垂直于zo轴,指向卫星飞行方向,yo轴与zo轴和xo轴垂直,且构成右手正交坐标系。
[0079]
第一阶段的轨道转移目标是提高半长轴,同时压倾角。该阶段轨控推力在轨道坐标系的xoooyo平面内,与+xo保持一定夹角,其绝对值不变为ψ1,但在幅角为90
°
和270
°
前后,改变正负。第一阶段姿态控制的参考姿态,即轨控坐标系设定为:先绕轨道坐标系的z轴旋转角度ψ1,称为轨控偏航角,再绕轨道坐标系的y轴旋转90
°
,使轨控坐标系的
‑
x轴指地,此时轨控坐标系的+z轴与前进方向(朝东)的夹角就是所需要的轨控偏航角,其幅值不变,但在幅角为90
°
和270
°
前后改变正负。因此,电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi1
由轨道坐标系c
oi
旋转得到,即
[0080][0081]
第二阶段的轨道转移目标是减小偏心率,同时压倾角。该阶段轨控推力在对惯性定向的基础上保持一定轨控夹角,从而进一步调整轨道倾角,其绝对值不变为ψ2,但在幅角为90
°
和270
°
前后改变正负。第一阶段姿态控制的参考姿态,即轨控坐标系基于近焦点坐标系pqw旋转得到。近焦点坐标系pqw中,p轴指向轨道的近地点方向、w轴指向轨道正法向,q轴与p轴、w轴构成右手正交坐标系统。轨控坐标系与pqw坐标系各轴对应关系为,轨控坐标系x轴对应pqw坐标系
‑
p轴,轨控坐标系y轴对应pqw坐标系
‑
w轴,轨控坐标系z轴对应pqw坐标系
‑
q。转换坐标轴对应关系后,再绕当前坐标系x轴旋转ψ2,即得电推轨道转移第二阶段的轨控坐标系c
ormi2
。即首先根据轨道要素计算惯性系到pqw坐标系的转换矩阵c
pqwi
[0082][0083]
其中ω为轨道近地点幅角,ω为轨道升交点赤经,i为轨道倾角。
[0084]
进一步可得到电推轨道转移第二阶段的轨控坐标系c
ormi2
,
[0085][0086]
其中
[0087]
sψ2=sin(ψ2),cψ2=cos(ψ2)
[0088]
sω=sin(ω),cω=cos(ω)
[0089]
si=sin(i),ci=cos(i)
[0090]
sω=sin(ω),cω=(cosω)
[0091]
g
k1
=cω
·
sω+sω
·
cω
·
ci
[0092]
g
k2
=sω
·
sω
‑
cω
·
cω
·
ci
[0093]
不妨设本实施例中处于电推轨道转移的第一阶段,轨控坐标系取为c
ormi1
。
[0094]
(2)基于任意参考坐标系建立电推点火目标姿态
[0095]
首先,电推轨道转移的点火姿态建立完毕后,卫星本体系相对参考坐标系的姿态转换矩阵c
br
应满足
[0096]
c
br
·
c
ri
=c
ormi1
或c
br
·
c
ri
=c
ormi2
[0097]
其中c
ri
为惯性系到参考坐标系的姿态转换矩阵,假设卫星在参考坐标系下的三轴姿态欧拉角为θ
br
,ψ
br
,则有
[0098]
或
[0099]
对电推轨道转移第一阶段建立电推点火目标姿态时,令
[0100][0101]
对电推轨道转移第二阶段建立电推点火目标姿态时,令
[0102][0103]
给定欧拉角转序,即可由c
br
求取θ
br
,ψ
br
。当欧拉转动顺序为3
‑2‑
1时,
[0104][0105][0106]
ψ
br
=tan2
‑1(c
12
,c
11
)∈[
‑
π,π]
[0107]
其中函数tan2
‑1(y,x)定义为
[0108][0109]
当欧拉转动顺序为3
‑1‑
2时,
[0110][0111]
θ
br
=tan2
‑1(
‑
c
13
,c
33
)∈[
‑
π,π]
[0112]
ψ
br
=tan2
‑1(
‑
c
21
,c
22
)∈[
‑
π,π]
[0113]
其余欧拉转动顺序同理。在任意参考坐标系基准下,通过解算欧拉角θ
br
,ψ
br
,将其设置为三轴姿态控制的目标姿态角,则可基于任意参考坐标系将卫星控制到电推点火的目标姿态。
[0114]
本实施例处于电推轨道转移的第一阶段,不失一般性,设定基于惯性系建立电推点火目标姿态,电推轨道转移的点火姿态建立完毕后,卫星本体系相对惯性系的姿态转换矩阵应满足
[0115]
c
bi
=c
ormi1
[0116]
假设卫星在j2000惯性系下的三轴姿态欧拉角为θ
br
,ψ
br
,则有
[0117][0118]
此时c
ri
为单位阵,则有
[0119][0120]
本实施处于电推轨道转移第一阶段,建立电推点火目标姿态时,令
[0121][0122]
给定欧拉角转序,即可由c
br
求取θ
br
,ψ
br
。本实施例设定欧拉转动顺序为3
‑2‑
1,则
[0123][0124][0125]
ψ
bi
=tan2
‑1(c
12
,c
11
)∈[
‑
π,π]
[0126]
其中函数tan2
‑1(y,x)定义为
[0127][0128]
在惯性坐标系基准下,通过解算欧拉角θ
br
,ψ
br
,将其设置为三轴姿态控制的目标姿态角,则可基于惯性坐标系将卫星控制到电推点火的目标姿态。
[0129]
(3)电推轨道转移期间的姿态对日跟踪
[0130]
经步骤(2)由任意参考坐标系建立电推点火目标姿态后,转为以步骤(1)获得的轨控坐标系为参考坐标系,进行电推轨道转移期间的姿态控制。同时,电推轨道转移期间为满足能源要求,需通过绕点火方向所在轴旋转和太阳翼旋转实现太阳翼法向对日。
[0131]
如果电推轨道转移处于第一阶段,则点火姿态基于轨道系基准,太阳方向时变,为跟踪能源需实现姿态动态偏置。即转移轨道电推进变轨期间,卫星+z轴指向轨控推力方向,当需要帆板指向太阳时,本体系绕轨控坐标系z轴旋转一定的角度,使卫星的xoz平面与太阳方向和推力方向组成的平面重合。
[0132]
根据当前星时和太阳星历计算得到太阳矢量在惯性坐标系的表达s
i
,经电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi1
,将太阳矢量表达于第一阶段的轨控坐标系,即
[0133]
s
orm1
=[s
orm1x s
orm1y s
orm1z
]
t
=c
ormi1
·
s
i
[0134]
则姿态控制目标在第一阶段轨控坐标系的基础上,绕轨控坐标系z轴偏置角度ψ
d
为
[0135]
ψ
d
=tan2
‑1(s
orm1y
,s
orm1x
)∈[
‑
π,π]
[0136]
如果电推轨道转移处于第二阶段,则点火姿态基于惯性系基准,太阳矢量方向短期内固定,因而为保障能源的姿态偏置角也固定。即转移轨道电推进变轨期间,卫星+z轴指向轨控推力方向,当需要帆板指向太阳时,本体系绕轨控坐标系z轴旋转一定的角度,使卫星的xoz平面与太阳方向和推力方向组成的平面重合。
[0137]
根据当前星时和太阳星历计算得到太阳矢量在惯性坐标系的表达s
i
,经电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi2
,将太阳矢量表达于第一阶段的轨控坐标系,即
[0138]
s
orm2
=[s
orm2x s
orm2y s
orm2z
]
t
=c
ormi2
·
s
i
[0139]
则姿态控制目标在第一阶段轨控坐标系的基础上,绕轨控坐标系z轴偏置角度ψ
d
为
[0140]
ψ
d
=tan2
‑1(s
orm2y
,s
orm2x
)∈[
‑
π,π]
[0141]
通过姿态对日跟踪和太阳帆板对日转角控制,可将太阳帆板法向与太阳方向的夹角,即能源角,控制到精度要求范围内,满足太阳帆板法向自主对日以保障能源。
[0142]
本实施例中电推轨道转移处于第一阶段,则点火姿态基于轨道系基准,太阳方向时变,为跟踪能源需实现姿态动态偏置。即转移轨道电推进变轨期间,卫星+z轴指向轨控推
力方向,当需要帆板指向太阳时,本体系绕轨控坐标系z轴旋转一定的角度,使卫星的xoz平面与太阳方向和推力方向组成的平面重合。
[0143]
根据当前星时和太阳星历计算得到太阳矢量在惯性坐标系的表达s
i
,经电推轨道转移第一阶段的轨控坐标系相对于惯性系的转换矩阵c
ormi1
,将太阳矢量表达于第一阶段的轨控坐标系,即
[0144]
s
orm1
=[s
orm1x s
orm1y s
orm1z
]
t
=c
ormi1
·
s
i
[0145]
则姿态控制目标在第一阶段轨控坐标系的基础上,绕轨控坐标系z轴偏置角度ψ
d
为
[0146]
ψ
d
=tan2
‑1(s
orm1y
,s
orm1x
)∈[
‑
π,π]
[0147]
通过姿态对日跟踪和太阳帆板对日转角控制,可将太阳帆板法向与太阳方向的夹角,即能源角,控制到精度要求范围内,满足太阳帆板法向自主对日以保障能源。
[0148]
综上,本发明涉及的一种电推轨道转移的点火姿态建立与动态跟踪方法,可根据电推转移轨道控制的不同目标阶段,基于任意参考坐标系准确建立电推轨道转移的点火目标姿态,并在电推轨道转移期间提供自主跟踪能源的对日目标姿态。本发明方法可同时满足电推进轨道转移期间的多目标姿态控制需求,包括提高半长轴或减小偏心率的变轨需求、压低轨道倾角的点火方向调整需求、以及动态跟踪太阳方向的能源需求,为在轨实现电推进轨道转移提供了技术途径。
[0149]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。