1.本实用新型涉及无人机设备领域,尤其涉及一种抗干扰的无人机悬停装置。
背景技术:
2.无人机在进行悬停飞行时,需要通过光流进行定点,光流定点主要通过拍摄地面进行,且光流必须在有光的情况下拍摄清楚地面才能运行,在暗光环境下光流定点准确性会降低,从而导致悬停定位不准,稳点性降低,且无人机在进行飞行时,当gps信号受到干扰,就会导致无人机造成悬停不稳、返航、甚至坠毁,因此,为了解决此类问题,我们提出了一种抗干扰的无人机悬停装置。
技术实现要素:
3.本实用新型提出的一种抗干扰的无人机悬停装置,解决了现有的无人机存在的缺少抗干扰设备,当gps信号受到干扰,就会导致无人机造成悬停不稳、返航、甚至坠毁,稳点性差的问题。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种抗干扰的无人机悬停装置,包括无人机机体,所述无人机机体顶端设置有多模信号接收器,所述无人机机体远离多模信号接收器的一侧设置有散光板,所述散光板内侧设置有补光灯,所述无人机机体侧壁固定安装有舵机,所述舵机输出轴安装有桨叶,所述散光板侧壁设置有连接件,所述连接件与无人机机体固定连接,所述连接件远离无人机机体的一侧安装有相机,所述相机靠近散光板的一侧设置有光流,所述光流与无人机机体固定连接,所述散光板侧壁设置有支撑架,所述无人机机体的侧壁设置有电池。
6.优选的,所述电池和多模信号接收器均内嵌于无人机机体,且电池和多模信号接收器均与无人机机体的侧壁结构一致。
7.优选的,所述无人机机体与连接件、散光板、补光灯和电池的中轴线均一致,且散光板和补光灯均与无人机机体的中心线一致。
8.优选的,所述舵机和桨叶均以无人机机体呈十字交叉分布的两条中轴线为对称轴呈对称分布。
9.优选的,所述支撑架呈u型,所述支撑架与无人机机体固定连接,所述支撑架以无人机机体的中轴线为对称轴呈对称分布。
10.优选的,所述多模信号接收器同时接收gps、北斗、格洛纳斯信号。
11.本实用新型的有益效果为:
12.1、通过增设散光板对补光灯进行光源折射发散,形成无死角照明,避免因光线过暗,导致光流定点误差,从而保证光流的拍摄清洗,进行精确的定点,保证悬停的稳定性。
13.2、通过设置多模信号接收器,同时接收gps、北斗、格洛纳斯信号,当某一卫星信号不好、受到干扰的时候,系统可以自动切换至其他导航系统,保证定位的正常使用,优化定位的准确性。
14.综上所述,该装置补光效果好,光流定点准确,悬停稳定性高,定位准确性好。
附图说明
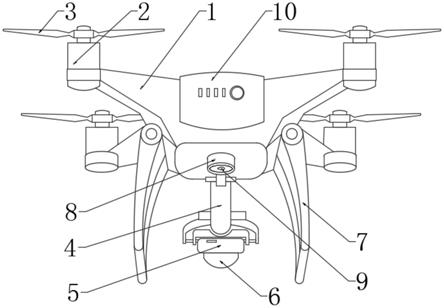
15.图1为本实用新型仰视状态在的三维结构示意图。
16.图2为本实用新型的俯视图。
17.图3为本实用新型的仰视图。
18.图中标号:1、无人机机体;2、舵机;3、桨叶;4、连接件;5、相机;6、光流;7、支撑架;8、散光板;9、补光灯;10、电池;11、多模信号接收器。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1-图3,一种抗干扰的无人机悬停装置,包括无人机机体1,所述无人机机体1顶端设置有多模信号接收器11,所述无人机机体1远离多模信号接收器11的一侧设置有散光板8,所述散光板8内侧设置有补光灯9,所述无人机机体1侧壁固定安装有舵机2,所述舵机2输出轴安装有桨叶3,所述散光板8侧壁设置有连接件4,所述连接件4与无人机机体1固定连接,所述连接件4远离无人机机体1的一侧安装有相机5,所述相机5靠近散光板8的一侧设置有光流6,所述光流6与无人机机体1固定连接,所述散光板8侧壁设置有支撑架7,所述无人机机体1的侧壁设置有电池10,所述电池10和多模信号接收器11均内嵌于无人机机体1,且电池10和多模信号接收器11均与无人机机体1的侧壁结构一致,所述无人机机体1与连接件4、散光板8、补光灯9和电池10的中轴线均一致,且散光板8和补光灯9均与无人机机体1的中心线一致,所述舵机2和桨叶3均以无人机机体1呈十字交叉分布的两条中轴线为对称轴呈对称分布,所述支撑架7呈u型,所述支撑架7与无人机机体1固定连接,所述支撑架7以无人机机体1的中轴线为对称轴呈对称分布,所述多模信号接收器11同时接收gps、北斗、格洛纳斯信号。
21.工作原理:该抗干扰的无人机悬停装置在使用时,首先将该抗干扰的无人机悬停装置中的散光板8和补光灯9与无人机机体1底端匹配,然后将散光板8和补光灯9固定在无人机机体1上,且使补光灯9位于散光板8中部,随即将多模信号接收器11与无人机机体1顶端匹配,然后将多模信号接收器11固定在无人机机体1上,且将多模信号接收器11和补光灯9与无人机机体1内的cpu电性连接,随即根据飞行需求,将电池10与无人机机体1连接,通过遥控装置对该抗干扰的无人机悬停装置进行控制操作,开启舵机2和多模信号接收器11,使其舵机2工作,使与之连接的桨叶3转动,桨叶3转动使该无人机机体1受力起飞,当需要对该装置进行悬停时,开启补光灯9,补光灯9工作进行照明,同时散光板8工作,将补光灯9产生的光源进行反射发散,形成无死角的明亮照明,从而使光流6能够清楚的对地面进行拍摄,从而进行悬停,多模信号接收器11工作,同时接收gps、北斗、格洛纳斯信号,当出现卫星信号不稳定或受到干扰时,系统自动切换至其他导航系统,从而进行精确的定位,避免受干扰而造成悬停不稳、返航、甚至坠毁,使用接收后,关闭该装置即可。
22.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不
局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种抗干扰的无人机悬停装置,包括无人机机体(1),其特征在于,所述无人机机体(1)顶端设置有多模信号接收器(11),所述无人机机体(1)远离多模信号接收器(11)的一侧设置有散光板(8),所述散光板(8)内侧设置有补光灯(9),所述无人机机体(1)侧壁固定安装有舵机(2),所述舵机(2)输出轴安装有桨叶(3),所述散光板(8)侧壁设置有连接件(4),所述连接件(4)与无人机机体(1)固定连接,所述连接件(4)远离无人机机体(1)的一侧安装有相机(5),所述相机(5)靠近散光板(8)的一侧设置有光流(6),所述光流(6)与无人机机体(1)固定连接,所述散光板(8)侧壁设置有支撑架(7),所述无人机机体(1)的侧壁设置有电池(10)。2.根据权利要求1所述的一种抗干扰的无人机悬停装置,其特征在于,所述电池(10)和多模信号接收器(11)均内嵌于无人机机体(1),且电池(10)和多模信号接收器(11)均与无人机机体(1)的侧壁结构一致。3.根据权利要求1所述的一种抗干扰的无人机悬停装置,其特征在于,所述无人机机体(1)与连接件(4)、散光板(8)、补光灯(9)和电池(10)的中轴线均一致,且散光板(8)和补光灯(9)均与无人机机体(1)的中心线一致。4.根据权利要求1所述的一种抗干扰的无人机悬停装置,其特征在于,所述舵机(2)和桨叶(3)均以无人机机体(1)呈十字交叉分布的两条中轴线为对称轴呈对称分布。5.根据权利要求1所述的一种抗干扰的无人机悬停装置,其特征在于,所述支撑架(7)呈u型,所述支撑架(7)与无人机机体(1)固定连接,所述支撑架(7)以无人机机体(1)的中轴线为对称轴呈对称分布。6.根据权利要求1所述的一种抗干扰的无人机悬停装置,其特征在于,所述多模信号接收器(11)同时接收gps、北斗、格洛纳斯信号。
技术总结
本实用新型公开了一种抗干扰的无人机悬停装置,涉及无人机设备领域,针对现有的无人机存在的缺少抗干扰设备,当GPS信号受到干扰,就会导致无人机造成悬停不稳、返航、甚至坠毁,稳点性差的问题,现提出如下方案,其包括无人机机体,所述无人机机体顶端设置有多模信号接收器,所述无人机机体远离多模信号接收器的一侧设置有散光板,所述散光板内侧设置有补光灯,所述无人机机体侧壁固定安装有舵机,所述舵机输出轴安装有桨叶,所述散光板侧壁设置有连接件,所述连接件与无人机机体固定连接,所述连接件远离无人机机体的一侧安装有相机。本实用新型结构新颖,且补光效果好,光流定点准确,悬停稳定性高,定位准确性好。定位准确性好。定位准确性好。
技术研发人员:张聪 代丞烁 姚显瑞
受保护的技术使用者:河北普冠地理信息技术有限公司
技术研发日:2021.09.16
技术公布日:2022/2/19