1.本发明属于空间飞行器姿态规划技术领域,尤其涉及一种基于中继星测控的卫星姿态指向方法和系统。
背景技术:
2.我国现已部署多颗静止轨道中继通信卫星,具备了对其他卫星提供全球天基测控的能力,随着中高轨道卫星发展速度加快以及地面测控资源的制约,中继星测控将成为后续卫星飞控和在轨运行的主要测控手段之一。
3.一般情况下,卫星测控天线波束较宽,无需用户星姿态机动即可建立中继星通信链路,但也存在以下特殊情况需要卫星进行姿态机动:1)大偏心率转移轨道期间,卫星某定向姿态下星间通信链路的几何条件可能不满足;2)卫星配置可转动窄波束天线,其转动机构发生故障导致天线不可转动。用户星和中继星存在非线性相对轨道运行,为实现对中继星的快速指向,需要以最大角加速度进行姿态路径规划。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种基于中继星测控的卫星姿态指向方法和系统,用于在测控天线不可转动时建立用户星对中继星的测控链路,在姿态指向期间同时考虑了测控天线指向中继星的需求和太阳帆板对日需求,保障了能源的有效利用。
5.为了解决上述技术问题,本发明公开了一种基于中继星测控的卫星姿态指向方法,包括:
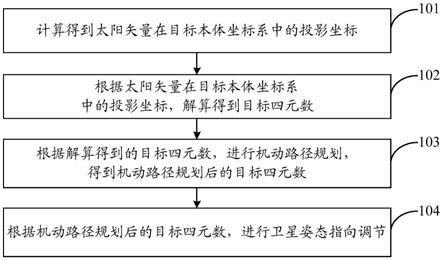
6.计算得到太阳矢量在目标本体坐标系中的投影坐标;
7.根据太阳矢量在目标本体坐标系中的投影坐标,解算得到目标四元数;
8.根据解算得到的目标四元数,进行机动路径规划,得到机动路径规划后的目标四元数;
9.根据机动路径规划后的目标四元数,进行卫星姿态指向调节。
10.在上述基于中继星测控的卫星姿态指向方法中,还包括:在进行卫星姿态指向调节的同时,根据太阳矢量在目标本体坐标系中的坐标,控制帆板转动,实现帆板法线对日。
11.在上述基于中继星测控的卫星姿态指向方法中,计算得到太阳矢量在目标本体坐标系中的投影坐标,包括:
12.根据太阳星历和卫星轨道位置,确定惯性坐标系下的太阳矢量和中继星矢量
13.根据测控天线在本体坐标系下的安装坐标(a
x
,a
y
,a
z
),确定测控天线在目标本体坐标系下的投影的坐标:
14.建立如下方程组(1):
[0015][0016]
其中,θ为与的夹角,s
x
和s
z
为方程组(1)的两个待求解;
[0017]
对方程组(1)进行求解,得到方程组(1)的解算结果;其中,方程组(1)的解算结果包括如下两组解:和
[0018]
根据方程组(1)的解算结果,确定太阳矢量在目标本体坐标系下的投影的坐标:
[0019]
在上述基于中继星测控的卫星姿态指向方法中,
[0020][0021][0022]
当即测控天线未指向卫星本体系的y轴时,方程组(1)有解,且为实数解;
[0023]
若s
x1
≠s
x2
,则选取与上一拍接近的一组解作为方程组(1)当前拍的解算结果。
[0024]
在上述基于中继星测控的卫星姿态指向方法中,根据太阳矢量在目标本体坐标系中的投影坐标,解算得到目标四元数,包括:
[0025]
根据和利用矢量叉乘,得到第一矩阵m
i
和第二矩阵m
b
:
[0026][0027][0028]
其中,和分别为由和生成的呈正交的3个坐标轴矢量,生成的呈正交的3个坐标轴矢量,生成的呈正交的3个坐标轴矢量,和分别为由和生成的呈正交的3个坐标轴矢
量,
[0029]
根据双矢量定姿原理,得到目标本体坐标系相对惯性坐标系的方向余弦矩阵c
bi
:
[0030][0031]
根据方向余弦矩阵c
bi
,解算得到目标四元数q
bi
。
[0032]
在上述基于中继星测控的卫星姿态指向方法中,根据解算得到的目标四元数,进行机动路径规划,得到机动路径规划后的目标四元数,包括:
[0033]
获取某定向姿态下的四元数q;
[0034]
根据q
bi
和q,解算得到误差四元数q
e
:
[0035][0036]
其中,表示四元数乘法运算;
[0037]
根据四元数与欧拉轴角的对应关系,将误差四元数q
e
表示为:
[0038][0039]
其中,表示误差四元数对应的欧拉转角;q
e0
、q
e1
、q
e2
和q
e3
分别为q
e
的四个元数;
[0040]
联立公式(2)和(3),解算得到误差四元数对应的欧拉转角和欧拉转轴:
[0041][0042][0043]
其中,e
q
表示误差四元数对应的欧拉转轴,e
x
、e
y
和e
z
分别为e
q
的3个分量;
[0044]
进行机动路径规划,得到机动路径规划后的目标四元数。
[0045]
在上述基于中继星测控的卫星姿态指向方法中,进行机动路径规划,得到机动路径规划后的目标四元数,包括:
[0046]
根据误差四元数对应的欧拉转角,计算得到误差四元数对应的欧拉转角的误差和增益:
[0047][0048][0049]
其中,表示第i时刻误差四元数对应的欧拉转角的误差,表示第i时刻误差四元数对应的欧拉转角,表示第i时刻机动路径规划后的的拉转角,k(i)表示第i时刻误差四元数对应的欧拉转角的增益,α和k0分别为误差四元数对应的欧拉转角的增益中的两个系数;
[0050]
根据和k(i),计算得到第i时刻的输入角速度v(i):
[0051]
[0052]
根据v(i)与角速度限幅阈值的关系,得到经角速度限幅后的角速度:
[0053][0054]
其中,v
in
(i)表示第i时刻经角速度限幅后的角速度;v
max
表示角速度限幅阈值;
[0055]
根据v
in
(i)与角加速度限幅阈值的关系,得到经角加速度限幅后的角速度:
[0056][0057]
其中,v
out
(i)表示第i时刻经角加速度限幅后的角速度,v
out
(i
‑
1)表示第i
‑
1时刻经角加速度限幅后的角速度;a
max
表示角加速度限幅阈值;t表示星载计算机运算步长;
[0058]
根据v
out
(i),由角速度积分,解算得到机动路径规划后的欧拉转角:
[0059][0060]
根据v
out
(i),解算得到机动路径规划后的目标四元数。
[0061]
在上述基于中继星测控的卫星姿态指向方法中,根据v
out
(i),解算得到机动路径规划后的目标四元数,包括:
[0062]
根据v
out
(i),解算得到机动路径规划后的误差四元数q
eout
:
[0063][0064]
根据q
eout
,解算得到机动路径规划后的目标四元数q
dout
:
[0065][0066]
在上述基于中继星测控的卫星姿态指向方法中,根据太阳矢量在目标本体坐标系中的坐标,控制帆板转动,实现帆板法线对日,包括:
[0067]
根据方程组(1)的解算结果,得到目标帆板转角β:
[0068][0069]
根据目标帆板转角β,控制帆板转动,实现帆板法线对日。
[0070]
相应的,本本发明还公开了一种基于中继星测控的卫星姿态指向系统,包括:
[0071]
计算模块,用于计算得到太阳矢量在目标本体坐标系中的投影坐标;
[0072]
解算模块,用于根据太阳矢量在目标本体坐标系中的投影坐标,解算得到目标四
元数;
[0073]
机动路径规划模块,用于根据解算得到的目标四元数,进行机动路径规划,得到机动路径规划后的目标四元数;
[0074]
调节模块,用于根据机动路径规划后的目标四元数,进行卫星姿态指向调节。
[0075]
本发明具有以下优点:
[0076]
(1)本发明公开了一种基于中继星测控的卫星姿态指向方案,基于统一的坐标系设计了最小角度方向的角速度机动,实现通信链路的快速建立,在姿态指向期间同时考虑了测控天线指向中继星的需求和太阳帆板对日需求,保障了能源的有效利用。
[0077]
(2)本发明公开了一种基于中继星测控的卫星姿态指向方案,克服了现有以固定角加速度进行姿态路径规划的不足,可实现自适应路径规划,在实现最大角加速度姿态机动的同时,避免了姿态机动末期收敛时间较慢的问题。
[0078]
(3)本发明公开了一种基于中继星测控的卫星姿态指向方案,将卫星姿态运动分解为两个步骤:基于最小路径的姿态角速度机动,从而快速建立星间链路;在跟踪误差范围内通过姿态指向运动,实时维持星间链路。上述途径有效解决了对中继星的快速跟踪和稳定指向问题。
[0079]
(4)本发明公开了一种基于中继星测控的卫星姿态指向方案,以明显的物理意义建立了测控天线指向中继星的矢量和太阳矢量的约束关系,同时利用双矢量定姿原理得到卫星目标姿态,加之帆板驱动机构的转动,创造性地解决了测控天线指向中继星和帆板法线同时指向太阳的工程问题,提高了测控期间太阳能源利用效率。
[0080]
(5)本发明公开了一种基于中继星测控的卫星姿态指向方案,针对一类不可转动的测控天线进行设计,对测控天线的安装位置和天线波束并无特殊要求。
附图说明
[0081]
图1是本发明实施例中一种基于中继星测控的卫星姿态指向方法的步骤流程图;
[0082]
图2是本发明实施例中一种欧拉转角的自适应规划框图;
[0083]
图3是本发明实施例中一种欧拉转角规划曲线图;
[0084]
图4是本发明实施例中一种欧拉转角加速度和角加速度规划曲线图;
[0085]
图5是本发明实施例中一种目标四元数规划曲线图;
[0086]
图6是本发明实施例中一种基于中继星测控的卫星姿态指向系统的结构框图。
具体实施方式
[0087]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0088]
本发明的核心思想之一在于:引入太阳矢量在本体坐标系xoz面内的约束条件,建立方程得到太阳矢量在目标本体坐标系中的坐标,进一步利用双矢量原理得到卫星姿态指向的目标四元数。计算出后误差四元数后,求取与之对应的欧拉轴角,并且采用自适应方法对欧拉转角进行最大角加速度规划,以实现测控天线对中继星通信链路的快速建立。通过帆板转动,实现帆板法线对日。
[0089]
如图1,在本实施例中,该基于中继星测控的卫星姿态指向方法,包括:
[0090]
步骤101,计算得到太阳矢量在目标本体坐标系中的投影坐标。
[0091]
在本实施例中,可以根据太阳星历和卫星轨道位置,确定惯性坐标系下的太阳矢量和中继星矢量然后,根据测控天线在本体坐标系下的安装坐标(a
x
,a
y
,a
z
),确定测控天线在目标本体坐标系下的投影的坐标:
[0092]
进一步的,建立如下方程组(1):
[0093][0094]
对方程组(1)进行求解,得到方程组(1)的解算结果。
[0095]
最后,根据方程组(1)的解算结果,确定太阳矢量在目标本体坐标系下的投影的坐标:
[0096]
其中,θ为与的夹角,s
x
和s
z
为方程组(1)的两个待求解;方程组(1)的解算结果包括如下两组解:和
[0097]
优选的:
[0098][0099][0100]
其中,当即测控天线未指向卫星本体系的y轴时,方程组(1)有解,且为实数解。若s
x1
≠s
x2
,则选取与上一拍接近的一组解作为方程组(1)当前拍的解算结果。
[0101]
步骤102,根据太阳矢量在目标本体坐标系中的投影坐标,解算得到目标四元数。
[0102]
在本实施例中,可以根据和利用矢量叉乘,得到第一矩阵m
i
和第二矩阵m
b
:
[0103][0104]
[0105]
其中,和分别为由和生成的呈正交的3个坐标轴矢量,生成的呈正交的3个坐标轴矢量,生成的呈正交的3个坐标轴矢量,和分别为由和生成的呈正交的3个坐标轴矢量,
[0106]
然后,根据双矢量定姿原理,得到目标本体坐标系相对惯性坐标系的方向余弦矩阵c
bi
:
[0107][0108]
最后,根据方向余弦矩阵c
bi
,解算得到目标四元数q
bi
。
[0109]
步骤103,根据解算得到的目标四元数,进行机动路径规划,得到机动路径规划后的目标四元数。
[0110]
在本实施例中,首先,获取某定向姿态下的四元数q;根据q
bi
和q,解算得到误差四元数q
e
:
[0111][0112]
其中,表示四元数乘法运算。
[0113]
然后,根据四元数与欧拉轴角的对应关系,将误差四元数q
e
表示为:
[0114][0115]
其中,表示误差四元数对应的欧拉转角;q
e0
、q
e1
、q
e2
和q
e3
分别为q
e
的四个元数。
[0116]
进一步的,联立公式(2)和(3),解算得到误差四元数对应的欧拉转角和欧拉转轴:
[0117][0118][0119]
其中,e
q
表示误差四元数对应的欧拉转轴,e
x
、e
y
和e
z
分别为e
q
的3个分量。
[0120]
最后,进行机动路径规划,得到机动路径规划后的目标四元数。
[0121]
优选的,进行机动路径规划,得到机动路径规划后的目标四元数具体可以包括:
[0122]
根据误差四元数对应的欧拉转角,计算得到误差四元数对应的欧拉转角的误差和增益:
[0123][0124][0125]
其中,表示第i时刻误差四元数对应的欧拉转角的误差,表示第i时刻误差四元数对应的欧拉转角,表示第i时刻机动路径规划后的的拉转角,k(i)表示第
i时刻误差四元数对应的欧拉转角的增益,α和k0分别为误差四元数对应的欧拉转角的增益中的两个系数。
[0126]
根据和k(i),计算得到第i时刻的输入角速度v(i):
[0127][0128]
根据v(i)与角速度限幅阈值的关系,得到经角速度限幅后的角速度:
[0129][0130]
根据v
in
(i)与角加速度限幅阈值的关系,得到经角加速度限幅后的角速度:
[0131][0132]
根据v
out
(i),由角速度积分,解算得到机动路径规划后的欧拉转角:
[0133][0134]
根据v
out
(i),解算得到机动路径规划后的目标四元数。
[0135]
其中,v
in
(i)表示第i时刻经角速度限幅后的角速度;v
max
表示角速度限幅阈值;v
out
(i)表示第i时刻经角加速度限幅后的角速度,v
out
(i
‑
1)表示第i
‑
1时刻经角加速度限幅后的角速度;a
max
表示角加速度限幅阈值;t表示星载计算机运算步长。
[0136]
进一步优选的,先根据v
out
(i),解算得到机动路径规划后的误差四元数q
eout
:
[0137][0138]
然后,根据q
eout
,解算得到机动路径规划后的目标四元数q
dout
:
[0139][0140]
如图2,为欧拉转角的自适应规划框图,与相减,可得到欧拉转角误差将乘以增益并与相加得到v(i),v(i)先后经过角速度限幅和角加速度限幅,得到v
out
(i);最后,通过积分得到可以看出,增益能够根据误差的大小进行自适应调整:误差增大时,增益减小;误差减小时,增益增大。这样设计的优点在于,可以减小姿态机动末期的跟踪误差收敛时间。
[0141]
步骤104,根据机动路径规划后的目标四元数,进行卫星姿态指向调节。
[0142]
步骤105,在进行卫星姿态指向调节的同时,根据太阳矢量在目标本体坐标系中的坐标,控制帆板转动,实现帆板法线对日。
[0143]
在本实施例中,根据方程组(1)的解算结果,得到目标帆板转角β:
[0144][0145]
根据目标帆板转角β,控制帆板转动,实现帆板法线对日。
[0146]
在上述实施例的基础上,下面以以一颗处于椭圆轨道的用户星和一颗处于geo轨道的中继星为例进行说明。
[0147]
卫星初始轨道参数如表1所示:
[0148]
项目中继星用户星轨道历元2022
‑
09
‑
08 08:00:002022
‑
09
‑
08 08:00:00半长轴(km)42166.318378.1偏心率(
°
)0.0010.3轨道倾角(
°
)0.0540升交点赤经(
°
)11050近地点幅角(
°
)5100平近点角(
°
)1055
[0149]
表1,卫星初始轨道参数表
[0150]
测控天线安装在卫星本体
‑
z轴上,即a
b
=[0 0
ꢀ‑
1]
t
。用户星初始时刻处于对地定向姿态。姿态角加速度限幅为0.5
°
/s2,姿态角速度限幅为3
°
/s,星载计算机仿真步长t=0.064s。自适应增益参数分别为k0=0.2和α=5。
[0151]
(1)计算太阳矢量在目标本体坐标系的坐标
[0152]
取太阳矢量在目标本体坐标系的投影为s
b
=[s
x 0 s
z
]
t
。测控天线坐标为t
b
=a
b
=[a
x a
y a
z
]
t
=[0 0
ꢀ‑
1]
t
。设θ为矢量和的夹角,根据以上条件,建立方程:
[0153][0154]
解得:
[0155][0156]
当即测控天线未指向本体y轴时,方程有解,且为实数解。如果s
x1
≠s
x2
,为保证卫星姿态跟踪的连续性,应选取与上一拍接近的解。
[0157]
(2)计算惯性系到目标本体系的姿态转换矩阵
[0158]
利用矢量叉乘建立矩阵:
[0159][0160][0161]
则,矩阵矩阵
[0162]
根据双矢量定姿原理,得到目标本体系相对惯性系的方向余弦阵为
[0163]
最后,根据方向余弦矩阵c
bi
,解算得到目标四元数q
bi
。
[0164]
(3)姿态四元数机动路径规划
[0165]
误差四元数q
e
为:
[0166][0167]
已知四元数与欧拉轴角存在对应的关系,误差四元数q
e
可进一步写为:
[0168][0169]
解得:
[0170][0171][0172]
对欧拉转角进行自适应规划:
[0173]
计算误差和增益:
[0174][0175][0176]
其中,k0=0.2和α=5
[0177]
计算输入角速度:
[0178][0179]
进行角速度限幅,得到经角速度限幅后的角速度:
[0180][0181]
其中,v
max
=3。
[0182]
进行角加速度限幅,得到经角加速度限幅后的角速度:
[0183][0184]
其中,a
max
=0.5,t=0.064。
[0185]
由角速度积分得到规划后的欧拉转角:
[0186]
φ
out
(i)=φ
out
(i
‑
1)+tv(i)
[0187]
进而,得到机动路径规划后的目标四元数q
eout
:
[0188][0189][0190]
(4)计算目标帆板转角
[0191]
设太阳帆板零位位置的法线指向卫星本体的
‑
z轴,根据得到目标帆板转角为:β=arctan(
‑
s
x
,
‑
s
z
)。其中,如果β<0,则β=β+360。仿真曲线如图3~5所示。
[0192]
在上述实施例的基础上,如图6,本发明还公开了一种基于中继星测控的卫星姿态指向系统,包括:计算模块601,用于计算得到太阳矢量在目标本体坐标系中的投影坐标;解算模块602,用于根据太阳矢量在目标本体坐标系中的投影坐标,解算得到目标四元数;机动路径规划模块603,用于根据解算得到的目标四元数,进行机动路径规划,得到机动路径规划后的目标四元数;调节模块604,用于根据机动路径规划后的目标四元数,进行卫星姿态指向调节。
[0193]
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
[0194]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0195]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。