1.本发明涉及一种电推进系统推力方向调节方法,属于空间电推进技术领域。
背景技术:
2.电推进系统目前已经广泛应用在卫星和各种飞行器中,且对电推进系统提出了轨道转移模式和位保模式的任务需求,为了在不同工作模式下都具备尽量高的效率,要求电推进系统具备在轨大范围调节推力方向的能力。
3.在轨道转移阶段,要求电推进系统将推力方向调节至
‑
z方向,实现推力效率接近1,在位保阶段,要求电推进系统将推力方向调节调节至指向质心执行南北、东西位保任务,或者相对质心偏转一个很小角度,在执行南北东西位保任务过程中,同步完成动量轮卸载任务。这样就要求电推进系统可实现推力方向大范围调节,x方向
‑
20
°
~﹢50
°
y方向
‑
30
°
~﹢30
°
。
4.现有的电推进系统推力方向调节是通过一个步进电机+滚珠丝杠的并联驱动装置来实现,推力调节范围很小,只能实现x方向
‑9°
~﹢7
°
y方向
‑5°
~﹢5
°
,并且因为并联驱动,转动角度计算方法相对复杂,不能满足要求。
技术实现要素:
5.本发明解决的技术问题为:克服上述现有技术的不足,提供一种电推进系统推力方向调节方法,实现卫星对电推进系统提出的推力方向调节要求。
6.本发明解决的技术方案为:
7.一种电推进系统推力方向调节方法,步骤如下:
8.(1)建立三维正交坐标系o
‑
xyz,作为整星机械坐标系;
9.(2)在卫星的背地板上的+y侧和
‑
y侧各安装2台推力矢量调节装置,+y侧的+x方向的推力矢量调节装置记为se;+y侧的
‑
x方向的推力矢量调节装置记为sw;
‑
y侧的+x方向的推力矢量调节装置记为ne;
‑
y侧的
‑
x方向的推力矢量调节装置记为nw;每台推力矢量调节装置上安装一个电推力器;
10.(3)每台推力矢量调节装置建立一个装置坐标系o
‑
xyz,即局部坐标系;
11.对于推力矢量调节装置se和sw,其装置坐标系的y轴与整星机械坐标系的y轴平行,且y轴正方向与y轴正方向相反;
12.对于推力矢量调节装置ne和nw,其装置坐标系的y轴与整星机械坐标系的y轴平行,且y轴正方向与y轴正方向相同;
13.对于推力矢量调节装置se和ne,其装置坐标系的x轴与整星机械坐标系的x轴平行,且x轴正方向与x轴正方向相反;
14.对于推力矢量调节装置sw和nw,其装置坐标系的x轴与整星机械坐标系的x轴平行,且x轴正方向与x轴正方向相同;
15.每台推力矢量调节装置包括正交连接的a轴和b轴两个轴,每台推力矢量调节装置
的a轴和b轴中心点连线与安装在其驱动面上的电推力器推力矢量平行;局部坐标系原点位于推力矢量调节装置a轴的中心,b轴是指靠近电推力器安装面的轴,另一个轴即为a轴;a轴与局部坐标系y轴平行,定义转动角α,沿局部坐标系+y方向看,顺时针转动为正;当α=0时,b轴与局部坐标系x轴平行,定义转动角β,此时沿局部坐标系+x方向看,逆时针转动为正;当α=β=0时,该台推力矢量调节装置对应的电推力器的推力方向为局部坐标系z轴方向,与整星机械坐标系o
‑
xyz的+z轴平行;
16.(4)计算出四台电推力器的推力矢量与xoy平面交点的坐标;
17.(5)根据步骤(3)四台推力矢量调节装置的装置坐标系o
‑
xyz的原点在整星机械坐标系中位置关系,确定四台推力矢量调节装置在星上安装的空间几何关系;根据四台推力矢量调节装置在星上安装的空间几何关系、a轴和b轴中心点连线与电推力器推力矢量的平行间距以及任务所需的推力目标方向,确定出四台推力矢量调节装置的两个正交转轴的转角;
18.(6)将步骤(5)计算得到的每台推力矢量调节装置的两个正交转轴的转角由弧度转换为角度后作为目标转角,然后按照两个目标转角值分别驱动每台矢量调节装置的两个转轴,使四台推力矢量调节装置对应的电推力器的推力方向,与各自对应的推力目标方向一致。
19.进一步的,所述三维正交坐标系o
‑
xyz具体为:原点位于卫星与火箭对接面的中心,z轴正方向为卫星质心指向地心的方向;x轴正方向为卫星飞行方向;y轴通过右手定则确定;卫星的背地板与oxy平面平行。
20.进一步的,所述步骤(4)计算出四台电推力器的推力矢量与xoy平面交点的坐标,具体为:令卫星质心在整星机械坐标系o
‑
xyz下的位置为xgc0,ygc0,zgc0,令目标推力指向与整星机械坐标系的xoy平面的交点偏离质心的偏移量为(dx
i
,dy
i
),其中i=1,2,3,4,分别代表电推力器ne、nw、se和sw;计算出四台电推力器的推力矢量与xoy平面交点的坐标为:
21.xgi=xgc0+dx
i
22.ygi=ygc0+dy
i
23.zgi=zgc0。
24.进一步的,四台推力矢量调节装置的两个正交转轴的转角,包括:ne推力矢量调节装置的两个轴的转角、nw推力矢量调节装置的两个轴的转角、sw推力矢量调节装置的两个轴的转角和se推力矢量调节装置的两个轴的转角。
25.进一步的,四台推力矢量调节装置ne/nw/se/sw的a轴的中心和b轴的中心在整星机械坐标系下的坐标为
26.[0027][0028]
进一步的,ne推力矢量调节装置的两个轴的转角具体为:
[0029]
a轴转动角α1为:
[0030][0031]
b轴转动角β1为:
[0032][0033]
四台推力矢量调节装置的a轴和b轴中心点连线与安装在推力矢量调节装置上的电推力器推力矢量平行间距均为d。
[0034]
进一步的,nw推力矢量调节装置的两个轴的转角计算:
[0035]
a轴转动角α2为:
[0036][0037]
b轴转动角β2为:
[0038][0039]
进一步的,se推力矢量调节装置的两个轴的转角计算:
[0040]
a轴转动角α3为:
[0041][0042]
b轴转动角β3为:
[0043][0044]
进一步的,sw推力矢量调节装置的两个轴的转角计算:
[0045]
a轴转动角α4为:
[0046][0047]
b轴转动角β4为:
[0048][0049]
进一步的,推力矢量调节装置的要求为:每台推力矢量调节装置由a轴和b轴两个正交连接的轴串联组成,两个轴之间通过一个立体8字型支架连接,每台推力矢量调节装置上安装一台电推力器,电推力器的推力矢量方向与电推力器在矢量调节装置上的安装面法向一致;
[0050]
电推力器的要求为:电推力器为离子推力器或者霍尔推力器,其自身无法对推力矢量进行调节,需要安装在矢量调节装置上,通过矢量调节装置的双轴转动实现推力矢量的调节。
[0051]
本发明与现有技术相比的优点在于:
[0052]
(1)本发明可实现多模式电推进系统推力方向大范围调节,满足轨道转移、位保、动量轮卸载等多种任务需求,具有广泛的适用范围。
[0053]
(2)本发明采用串联正交双轴推力矢量调节方案,通过在星上合理布局推力矢量调节装置,利用空间几何关系可推导出推力方向转角计算公式,方便可靠,具有很好的技术先进性。
[0054]
(3)本发明已在卫星上得到应用,成功的实现了电推进系统推力方向在轨大范围调节,满足卫星多模式任务需求,效果很好,表明本方法适用于工程实践,能够用于多模式电推进系统推力方向大范围调节,对于电推进技术工程应用有重要意义。
附图说明
[0055]
图1为本发明串联正交双轴推力矢量调节装置示意图;
[0056]
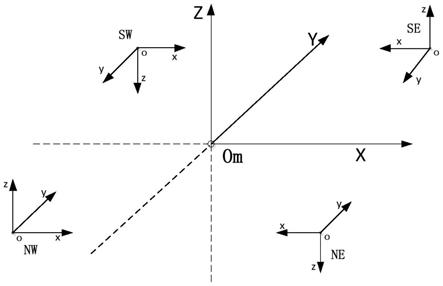
图2为本发明推力矢量调节装置在星上安装后的局部坐标系和整星坐标系的关系示意图。
具体实施方式
[0057]
下面结合附图和具体实施例对本发明做进一步详细描述。
[0058]
为了实现多模式电推进系统推力方向大范围调节,本发明提出一种电推进系统推力矢量调节方法,采用串联正交双轴推力矢量调节方案,通过在星上合理布局推力矢量调节装置,可以利用空间几何关系给出转动角度计算方法,该方法简单、方便、灵活、可靠。
[0059]
针对卫星对多模式电推进系统提出的推力方向大范围调节要求,需要解决以下几个技术问题:
[0060]
(1)针对性的设计能够实现推力方向大范围调节的推力矢量调节装置,在星上合理布局,通过星上安装几何关系推导出四台推力矢量调节装置的转角计算方法。
[0061]
(2)根据卫星不同任务对推力目标方向的需求,求解当前任务模式下的四台推力器的推力方向,然后代入到推力矢量调节转角计算公式中,分别求出各装置的a轴和b轴转角,通过驱动a轴和b轴转动,使a轴和b轴转动到目标角度,完成推力方向调节。
[0062]
(3)针对上述技术问题,对电推进系统推力方向大范围调节方法进行针对性设计:
[0063]
如附图1所示为了实现a轴和b轴的大范围转动,设计一种串联正交双轴推力矢量调节装置,将电推力器安装在该装置的驱动安装面上,a轴通过一个立体8字型支架与b轴连接,b轴转动时,通过立体8字型支架带动a轴转动,a轴转动时,通过电推力器驱动安装面带动电推力器转动,通过a轴和b轴的转动实现电推力器的推力方向大范围转动。b轴为靠近电推力器安装面的轴,另一个轴即为a轴。
[0064]
具体的,本发明提出的一种电推进系统推力方向调节方法,包括如下步骤:
[0065]
(1)如图2所示,建立三维正交坐标系o
‑
xyz,作为整星机械坐标系;原点位于卫星与火箭对接面的中心,z轴正方向为卫星质心指向地心的方向;x轴正方向为卫星飞行方向;y轴通过右手定则确定;卫星的背地板与oxy平面平行;
[0066]
(2)在卫星的背地板上的+y侧和
‑
y侧各安装2台推力矢量调节装置,总共4台,+y侧的+x方向的推力矢量调节装置记为se;+y侧的
‑
x方向的推力矢量调节装置记为sw;
‑
y侧的+x方向的推力矢量调节装置记为ne;
‑
y侧的
‑
x方向的推力矢量调节装置记为nw;每台推力矢量调节装置上安装一个电推力器;
[0067]
(3)每台推力矢量调节装置建立一个装置坐标系o
‑
xyz,即局部坐标系;原点位于该台推力矢量调节装置a轴的中心;
[0068]
对于推力矢量调节装置se和sw,其装置坐标系的y轴与整星机械坐标系的y轴平行,且y轴正方向与y轴正方向相反;
[0069]
对于推力矢量调节装置ne和nw,其装置坐标系的y轴与整星机械坐标系的y轴平行,且y轴正方向与y轴正方向相同;
[0070]
对于推力矢量调节装置se和ne,其装置坐标系的x轴与整星机械坐标系的x轴平行,且x轴正方向与x轴正方向相反;
[0071]
对于推力矢量调节装置sw和nw,其装置坐标系的x轴与整星机械坐标系的x轴平行,且x轴正方向与x轴正方向相同;
[0072]
每台推力矢量调节装置包括正交连接的a轴和b轴两个轴,每台推力矢量调节装置的a轴和b轴中心点连线与安装在其驱动面上的电推力器推力矢量平行;局部坐标系原点位于推力矢量调节装置a轴的中心,b轴是指靠近电推力器安装面的轴,另一个轴即为a轴;a轴
与局部坐标系y轴平行,定义转动角α,沿局部坐标系+y方向看,顺时针转动为正;当α=0时,b轴与局部坐标系x轴平行,定义转动角β,此时沿局部坐标系+x方向看,逆时针转动为正;当α=β=0时,该台推力矢量调节装置对应的电推力器的推力方向为局部坐标系z轴方向,与整星机械坐标系o
‑
xyz的+z轴平行。
[0073]
(4)令卫星质心在整星机械坐标系o
‑
xyz下的位置为xgc0,ygc0,zgc0,令目标推力指向与整星机械坐标系的xoy平面的交点偏离质心的偏移量为(dx
i
,dy
i
),其中i=1,2,3,4,分别代表推力器ne、nw、se和sw;计算出四台推力器的推力矢量与xoy平面交点的坐标为:
[0074]
xgi=xgc0+dx
i
[0075]
ygi=ygc0+dy
i
[0076]
zgi=zgc0
[0077]
(5)根据α=β=0时四台推力矢量调节装置的a轴和b轴的中心在整星机械坐标系中坐标以及a轴和b轴中心点连线与电推力器推力矢量的平行间距,确定出四台推力矢量调节装置的两个正交转轴的转角,具体如下:
[0078]
若四台推力矢量调节装置ne/nw/se/sw的a轴的中心和b轴的中心在整星机械坐标系下的坐标为
[0079][0080][0081]
四台推力矢量调节装置的a轴和b轴中心点连线与安装在推力矢量调节装置上的电推力器推力矢量平行间距均为d。
[0082]
那么ne推力矢量调节装置的两个轴的转角计算:
[0083]
a轴转动角α1为:
[0084][0085]
b轴转动角β1为:
[0086][0087]
nw推力矢量调节装置的两个轴的转角计算:
[0088]
a轴转动角α2为:
[0089][0090]
b轴转动角β2为:
[0091][0092][0093]
se推力矢量调节装置的两个轴的转角计算:
[0094]
a轴转动角α3为:
[0095][0096]
b轴转动角β3为:
[0097][0098]
sw推力矢量调节装置的两个轴的转角计算:
[0099]
a轴转动角α4为:
[0100][0101]
b轴转动角β4为:
[0102]
[0103]
(5)对步骤(4)得到的四台推力矢量调节装置各自的两个正交转轴的转角αi,βi由弧度转换为角度αi0,βi0,然后以此作为四台推力矢量调节装置a轴和b轴的转动目标角,再分别驱动a轴和b轴转动直至达到目标角度αi0,βi0,使推力指向与目标推力指向一致。
[0104]
本发明中推力矢量调节装置的要求为:每台推力矢量调节装置由a轴和b轴两个正交连接的轴串联组成,两个轴之间通过一个立体8字型支架连接,每台推力矢量调节装置上安装一台电推力器,电推力器的推力矢量方向与电推力器在矢量调节装置上的安装面法向一致;
[0105]
电推力器的要求为:电推力器为离子推力器或者霍尔推力器,其自身无法对推力矢量进行调节,需要安装在矢量调节装置上,通过矢量调节装置的双轴转动实现推力矢量的调节。
[0106]
实施例:
[0107]
(1)令卫星质心在整星机械坐标系o
‑
xyz下的位置(xgc0,ygc0,zgc0)=(0,0,2300),若要四台电推力器ne/nw/se/sw的目标推力指向均指向质心,即目标推力指向与整星机械坐标系的xoy平面的交点偏离质心的偏移量(dx
i
,dy
i
)=(0,0),其中i=1,2,3,4;由此计算出四台推力器的推力矢量与xoy平面交点的坐标为:
[0108] xgiygizgi电推力器ne推力指向与xoy交点002300电推力器nw推力指向与xoy交点002300电推力器se推力指向与xoy交点002300电推力器sw推力指向与xoy交点002300
[0109]
其中i=1,2,3,4,分别代表电推力器ne/nw/se/sw。
[0110]
四台推力矢量调节装置ne/nw/se/sw的a轴的中心和b轴的中心在整星机械坐标系下的坐标如下表
[0111][0112][0113]
四台推力矢量调节装置的a轴和b轴中心点连线与安装在推力矢量调节装置上的电推力器推力矢量平行间距均为242.6。
[0114]
(2)根据步骤(1)中的四台电推力器ne/nw/se/sw的目标推力指向与xoy平面交点
的坐标、四台推力矢量调节装置ne/nw/se/sw的a轴的中心和b轴的中心在整星机械坐标系下的坐标以及四台推力矢量调节装置的a轴和b轴中心点连线与安装在推力矢量调节装置上的电推力器推力矢量平行间距,可以计算出四台推力矢量调节装置ne/nw/se/sw的a轴和b轴的转动角度如下:
[0115]
ne推力矢量调节装置的两个轴的转角计算:
[0116]
a轴转动角α1为:
[0117][0118]
b轴转动角β1为:
[0119][0120]
nw推力矢量调节装置的两个轴的转角计算:
[0121]
a轴转动角α2为:
[0122][0123]
b轴转动角β2为:
[0124][0125]
se推力矢量调节装置的两个轴的转角计算:
[0126]
a轴转动角α3为:
[0127][0128]
b轴转动角β3为:
[0129][0130]
sw推力矢量调节装置的两个轴的转角计算:
[0131]
a轴转动角α4为:
[0132][0133]
b轴转动角β4为:
[0134][0135]
(3)对步骤(2)得到的四台推力矢量调节装置各自的两个正交转轴的转角αi,βi由弧度转换为角度αi0,βi0,其中i=1,2,3,4;
[0136]
α10=
‑
12.23,β10=
‑
28.86
[0137]
α20=12.23,β10=28.86
[0138]
α30=12.23,β30=28.86
[0139]
α40=
‑
12.23,β40=
‑
28.86
[0140]
(4)以步骤(3)计算得到的四台推力矢量调节装置的a轴和b轴角度αi0,βi0作为转动目标角,再分别驱动a轴和b轴转动直至达到目标角度αi0,βi0,此时,每台电推力器的推力指向即与目标推力指向一致。
[0141]
本发明实施例提供的技术方案已经过验证,目前经过在轨飞行验证,该方法成功地实现了卫星上配置的四台5kw多模式电推力器的推力矢量在轨精确调节。在执行卫星南北位保任务时,要求四台电推力器的推力矢量均指向质心,最后通过角度控调整至指向质心,卫星推力矢量实际调节结果如下表所示:
[0142]
序号tpam转动目标角实测角度误差1.ne(
‑
12.23,
‑
28.36)(
‑
12.226,
‑
28.362(0.004,
‑
0.002)2.nw(12.23,28.36)(12.224,28.36)(
‑
0.006,0)3.se(12.23,28.36)(12.226,28.362)(
‑
0.004,0.002)4.sw(
‑
12.23,
‑
28.36)(
‑
12.224,
‑
28.354)(0.006,0.006)
[0143]
双轴转角的最大控制偏差0.006
°
,精度优于0.01
°
。这表明本方法适用于工程实
践,能够用于电推进系统推力矢量大范围精确调节,对于电推进技术工程应用有重要意义。此外,该方法具有广泛的适用性,可适用于需要在轨调节电推进系统推力矢量的航天器,为电推进系统在轨应用提供了很好的技术支撑。