1.本发明涉及微型飞行器技术领域,具体涉及一种可悬停仿生蜂鸟飞行器及其操控方法。
背景技术:
2.微型飞行器是指体积小于20cm,飞行距离大于5km,且滞空能力大于15min的微小飞行器。微型飞行器具有体积小、质量轻、隐蔽性高与机动灵活等优势,广泛应用于军事侦查、目标搜索、通信中继等关键的敏感应用中。与旋翼式、固定翼式微型飞行器相比,扑翼式飞行器具有形象的仿生外形与突出的低噪声优势,能够实现优异的隐蔽性能。此外,当飞行器几何尺寸减小时,小尺度下低雷诺数空气动力学特性造成旋翼、固定翼气动效率降低,这导致旋翼式、固定翼式微型飞行器难以实现更进一步的微型化,且小尺寸下飞行器运行效率低、噪声大。扑翼系统在小尺度下能够有效规避低雷诺数空气动力学特性带来的负面影响,甚至能够在昆虫尺寸下保持较高的气动效率实现低噪声、高能效运行。以蜂鸟为仿生蓝本的仿生飞行器体积小巧、外形更为生动形象、运行噪声低具有突出的隐蔽性,且一般具备像直升机那样的悬停飞行能力,可以灵活机动,在军事侦查等领域具有更加广阔的应用前景。目前,包括美国航空环境公司、普渡大学、韩国建国大学、欧洲布鲁塞尔自由大学等国际知名研究机构相继开展了仿生蜂鸟飞行器研究计划。
3.基于直流电机驱动的扑翼式微型飞行器,一般通过扑翼驱动机构将直流电机的旋转运动转化为扑翼的往复式运动。这些扑翼驱动机构,为了在有限的翅翼体积下提高升力,须最大限度提高翅翼扑动振幅,为解决这一问题,国内外诸多团队采用类似于多级连杆、滑轮之类的振幅放大机构。这样的振幅放大机构往往造成扑动机构复杂,重量也相对较大,不利于采用微纳加工工艺成型制造及微型化集成。针对仿生蜂鸟一类的扑翼式微型飞行器飞行操控问题,以航空环境公司为代表的国际领先研究团队先后提出了多种通过实时改变翅翼形状来产生用于姿态调节的气动力矩实现操纵控制。这种操控方法在改变翅翼形状的同时,也使翅翼的造型偏离设计理想形态,造成升力降低,并且翅翼气动性的改变给翅翼系统动力学特性增加了不可预知的非线性特征,加大了飞行器飞行控制难度,甚至会导致飞行器失控而坠落。
技术实现要素:
4.本发明的目的在于提供一种可悬停仿生蜂鸟飞行器及其操控方法,该飞行器的结构紧凑,能够根据设计需求将扑翼振幅放大至特定大小,以有效提高扑翼升力,且该飞行器能够实现俯仰、横滚、偏航三自由度姿态的可控飞行。
5.为实现上述目的,本发明采用了以下技术方案:
6.一种可悬停仿生蜂鸟飞行器,包括扑翼驱动机构、对称设置在扑翼驱动机构左右两侧的翅翼一与翅翼二、用于调节翅翼一扑动平面的舵机组件一、用于调节翅翼二扑动平面的舵机组件二、设置在扑翼驱动机构下方的机尾以及用于驱动机尾运动的舵机组件三。
7.所述扑翼驱动机构包括驱动组件和齿轮组件;所述驱动组件包括底座和安装在底座上的电机;所述底座上设有转轴一、转轴二、转轴三和转轴四;所述齿轮组件包括安装在电机输出轴上的主动齿轮、安装在转轴一上的双联齿轮、安装在转轴二上且与双联齿轮的上层齿轮啮合相连的从动齿轮、安装在转轴三上的分动齿轮一和安装在转轴四上且与分动齿轮一啮合相连的分动齿轮二;所述从动齿轮通过连杆与分动齿轮一相连;所述双联齿轮的下层齿轮与主动齿轮啮合相连;所述分动齿轮一的一侧设有与其啮合相连的增幅齿轮一,分动齿轮二的一侧设有与其啮合相连的增幅齿轮二;所述增幅齿轮一通过传动组件一与翅翼一及舵机组件一相连,增幅齿轮二通过传动组件二与翅翼二及舵机组件二相连。
8.进一步的,所述舵机组件一包括安装在底座上的舵机一和与舵机一的输出轴相连的舵机臂一;所述舵机组件二包括安装在底座上的舵机二和与舵机二的输出轴相连的舵机臂二。
9.进一步的,所述传动组件一包括传动轴一、万向联轴器一和传动轴二;所述传动轴一的一端与舵机臂一相连,另一端穿过翅翼座一后与万向联轴器一的上端相连,万向联轴器一的下端与传动轴二的上端相连,传动轴二的下端与增幅齿轮一相连;所述传动组件二包括传动轴三、万向联轴器二和传动轴四;所述传动轴三的一端与舵机臂二相连,另一端穿过翅翼座二后与万向联轴器二的上端相连,万向联轴器二的下端与传动轴四的上端相连,传动轴四的下端与增幅齿轮二相连。
10.进一步的,所述舵机组件三包括安装在机尾下端的舵机三和与舵机三的输出轴相连的舵机臂三;所述扑翼驱动机构还包括顶盖;所述舵机臂三通过推拉连杆与顶盖相连。
11.进一步的,所述万向联轴器一和万向联轴器二的结构相同,均包括自上向下依次设置的叉形接头一、十字轴和叉形接头二;所述叉形接头一和叉形接头二的结构相同,均包括u型的支座、开设在支座中间的传动轴孔和分别开设在支座左右侧壁上的轴销孔一与轴销孔二;所述十字轴为正方体,其四个侧面上分别开设有销轴孔一、销轴孔二、销轴孔三和销轴孔四;所述十字轴分别通过一对轴销与叉形接头一、叉形接头二相连。
12.进一步的,所述分动齿轮一和分动齿轮二均为直齿轮,二者的齿数大于增幅齿轮一或增幅齿轮二的齿数。
13.进一步的,所述翅翼一和翅翼二的结构相同,均包括翅脉和安装在翅脉上的翅膜;所述翅翼一通过翅翼座一与传动轴一相连,翅翼二通过翅翼座二与传动轴二相连。
14.本发明还涉及一种上述可悬停仿生蜂鸟飞行器的操控方法,该方法包括以下步骤:
15.(1)横滚调节:当舵机臂三逆时针旋转时,在推拉连杆作用下,机尾将向左摆动,整机重心向左偏移,进而产生向左倾转的姿态调节力矩;同理,当舵机臂顺时针旋转时,在推拉连杆作用下,机尾将向右摆动,整机重心向右偏移,进而产生向右倾转的姿态调节力矩。
16.(2)俯仰调节:当舵机一、舵机二分别驱动舵机臂一和舵机臂二小幅向y轴正方向倾转时,翅翼一、翅翼二扑动平面同步向后倾转,使升力作用方向向后倾转进而产生使机身后仰的姿态调节力矩;当舵机一、舵机二分别驱动舵机臂一和舵机臂二小幅向y轴负方向倾转时,翅翼一、翅翼二扑动平面同步向前倾转,使升力作用方向向前倾转,进而产生使机身前倾的姿态调节力矩。
17.(3)偏航调节:当舵机一驱动舵机臂一小幅向y轴负方向倾转,舵机二驱动舵机臂
二小幅向y轴正方向倾转时,翅翼一扑动平面向前倾转,翅翼二扑动平面向后倾转,同时产生使机身向右偏航的航向调节力矩;当舵机一驱动舵机臂一小幅向y轴正方向倾转,舵机二驱动舵机臂二小幅向y轴负方向倾转时,翅翼一扑动平面向后倾转,翅翼二扑动平面向前倾转,同时产生使机身向左偏航的航向调节力矩。
18.和现有技术相比,本发明的优点为:
19.(1)本发明提出了一种基于齿轮组的扑翼驱动机构,通过一组齿轮相互啮合配合实现振幅放大,能够达到提高升力的效果,并且零部件构造均为2d结构,有利于使用mems工艺制造及整体机构的微型化集成,最终实现减小体积、减轻重量。
20.(2)本发明针对所述仿生蜂鸟飞行器提出了一套飞行操控方法。所述的仿生蜂鸟飞行器借助万向联轴器进行动力传动,能够分别实现两侧翅翼扑动平面的独立倾转,通过倾转两侧翅翼扑动平面可实现俯仰、偏航控制,通过机尾的左右摆动可控制整机重心的左右偏移,同时产生横滚调节力矩,最终实现俯仰、横滚、偏航三自由度的姿态可控飞行。这种操纵机构与控制方法能够实现飞行器飞行状态下姿态的有效控制,并且无须干涉翅翼的形态,因此翅翼系统始终运行在理想形态,提高了动态气动效率,并改善了飞行器动力学特性降低了控制难度,有利于实现飞行器可控、高机动飞行。
附图说明
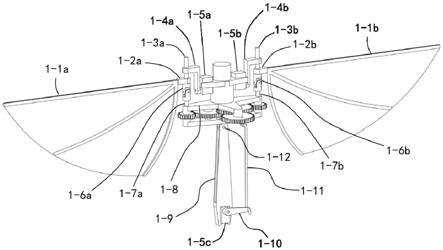
21.图1是本发明中仿生蜂鸟飞行器的结构示意图;
22.图2是翅翼一和翅翼二的结构示意图;
23.图3a是万向联轴器的结构示意图;
24.图3b是叉形接头一和叉形接头二的结构示意图;
25.图3c是十字轴的结构示意图;
26.图4是扑翼驱动机构的结构示意图;
27.图5a是舵机臂一和舵机臂二的结构示意图;
28.图5b是舵机一、舵机二和舵机三的结构示意图;
29.图5c是机尾的结构示意图;
30.图5d是舵机臂三的结构示意图;
31.图5e是推拉连杆的结构示意图;
32.图6a是顶盖的结构示意图;
33.图6b是连杆的结构示意图;
34.图6c是增幅齿轮一和增幅齿轮二的结构示意图;
35.图6d是分动齿轮一和分动齿轮二的结构示意图;
36.图6e是从动齿轮的结构示意图;
37.图6f是双联齿轮的结构示意图;
38.图6g是主动齿轮的结构示意图;
39.图6h是底座的结构示意图;
40.图6i是电机的结构示意图;
41.图7是横滚调节示意图;
42.图8是俯仰调节示意图;
43.图9是偏航调节示意图。
具体实施方式
44.下面结合附图对本发明做进一步说明:
45.如图1所示的一种可悬停仿生蜂鸟飞行器包括扑翼驱动机构1
‑
8、对称设置在扑翼驱动机构1
‑
8左右两侧的翅翼一1
‑
1a与翅翼二1
‑
1b、用于调节翅翼一扑动平面的舵机组件一、用于调节翅翼二扑动平面的舵机组件二、设置在扑翼驱动机构下方的机尾以及用于驱动机尾运动的舵机组件三。翅翼一1
‑
1a通过翅翼座一1
‑
2a与传动轴一1
‑
3a相连。翅翼二1
‑
1b通过翅翼座二1
‑
2b与传动轴三1
‑
3b相连。所述舵机组件一包括舵机一1
‑
5a和与舵机一1
‑
5a的输出轴相连的舵机臂一1
‑
4a。所述舵机组件二包括舵机二1
‑
5b和与舵机二1
‑
5b的输出轴相连的舵机臂二1
‑
4b。所述舵机组件三包括安装在机尾上的舵机三1
‑
5c和与舵机三1
‑
5c的输出轴相连的舵机臂三1
‑
10。
46.如图2所示,翅翼一1
‑
1a和翅翼二1
‑
1b的结构相同,均包括翅脉1
‑1‑
1、和翅膜1
‑1‑
2。翅翼一1
‑
1a通过翅翼座一1
‑
2a连接至传动轴一1
‑
3a。翅翼二1
‑
1b通过翅翼座二1
‑
2b连接至传动轴三1
‑
3b。所述翅脉1
‑1‑
1可由碳纤维、玻璃纤维等高强度、高韧性的轻质材料一体成型,其上具有多条辐射状加强筋用于改善翅翼气动性。所述翅膜1
‑1‑
2采用轻质薄膜材料一体切割成型,并通过粘合剂附着在翅脉1
‑1‑
1上。所述翅翼座一1
‑
2a、翅翼座二1
‑
2b上具有方形轴孔1
‑2‑
1和圆形轴孔1
‑2‑
2,翅翼一及翅翼二的翅脉1
‑1‑
1根部可插入方形轴孔1
‑2‑
1通过过盈配合连接。
47.传动轴一1
‑
3a通过万向联轴器一1
‑
6a与传动轴二1
‑
7a相连。传动轴三1
‑
3b通过万向联轴器二1
‑
6b与传动轴四1
‑
7b相连。万向联轴器一1
‑
6a、万向联轴器二1
‑
6b分别用于连接传动轴一1
‑
3a与传动轴二1
‑
7a、传动轴三1
‑
3b与传动轴四1
‑
7b,并使传动轴一1
‑
3a、传动轴三1
‑
3b能够自由调节其轴心指向。如图3所示,万向联轴器一1
‑
6a和万向联轴器二1
‑
6b的结构相同,均包括自上向下依次设置的叉形接头一2
‑
1a、十字轴2
‑
3和叉形接头二2
‑
1b,还包括轴销2
‑
2a、2
‑
2b、2
‑
2c、2
‑
2d。叉形接头一2
‑
1a和叉形接头二2
‑
1b的结构相同,均包括u型的支座、开设在支座中间的传动轴孔2
‑1‑
2和开设在支座左右两侧侧壁上的轴销孔一2
‑1‑
1a和轴销孔二2
‑1‑
1b。轴销2
‑
2a、2
‑
2b、2
‑
2c、2
‑
2d采用轻质刚性材料制成,用于约束叉形接头一2
‑
1a、叉形接头二2
‑
1b与十字轴2
‑
3。十字轴2
‑
3为轻质刚性材料制成的正方体,其上四周首尾相接的四面的中心依次开有销轴孔一2
‑3‑
1a、销轴孔二2
‑3‑
1b、销轴孔三2
‑3‑
1c、销轴孔四2
‑3‑
1d。轴销2
‑
2a、轴销2
‑
2c分别穿过叉形接头2
‑
1a的轴销孔一2
‑1‑
1a、轴销孔二2
‑1‑
1b,插入十字轴2
‑
3上的销轴孔一2
‑3‑
1a、销轴孔三2
‑3‑
1c,且轴销2
‑
2a、轴销2
‑
2c与叉形接头一2
‑
1a上的轴销孔一2
‑1‑
1a、轴销孔二2
‑1‑
1b间隙配合,与十字轴2
‑
3上的销轴孔一2
‑3‑
1a、销轴孔三2
‑3‑
1c过盈配合。轴销2
‑
2b、轴销2
‑
2d分别穿过叉形接头二2
‑
1b上的轴销孔一2
‑1‑
1a、轴销孔二2
‑1‑
1b,插入十字轴2
‑
3上的销轴孔二2
‑3‑
1b、销轴孔四2
‑3‑
1d,且轴销2
‑
2b、轴销2
‑
2d与叉形接头二2
‑
1b上的轴销孔一2
‑1‑
1a、轴销孔二2
‑1‑
1b间隙配合,与十字轴2
‑
3上的销轴孔二2
‑3‑
1b、销轴孔四2
‑3‑
1d过盈配合。图1中的传动轴一1
‑
3a、传动轴三1
‑
3b、传动轴二1
‑
7a和传动轴四1
‑
7b均采用轻质刚性材料制成。传动轴一1
‑
3a、传动轴三1
‑
3b分别穿过翅翼座一1
‑
2a、翅翼座二1
‑
2b上的轴孔1
‑2‑
2,插入万向联轴器一1
‑
6a、万向联轴器二1
‑
6b上部的叉形接头一2
‑
1a内的传动轴孔2
‑1‑
2,并分别通过过盈配合将其紧固。传
动轴二1
‑
7a、传动轴四1
‑
7b分别与万向联轴器一1
‑
6a、万向联轴器二1
‑
6b下部的叉形接头二2
‑
1b内的传动轴孔2
‑1‑
2过盈配合。当传动轴二1
‑
7a、传动轴四1
‑
7b转动时,通过万向联轴器一1
‑
6a、万向联轴器二1
‑
6b的连接,传动轴一1
‑
3a、传动轴三1
‑
3b轴心往任意方向小幅偏转均可保持与传动轴二1
‑
7a、传动轴四1
‑
7b同步转动。
48.本发明中的扑翼驱动机构1
‑
8采用直流电机作为动力,通过齿轮组和连杆机构驱动翅翼扑动。如图4所示,扑翼驱动机构1
‑
8包括顶盖3
‑
1,传动轴二1
‑
7a、传动轴四1
‑
7b,销钉3
‑
2a、销钉3
‑
2b,连杆3
‑
3,增幅齿轮一3
‑
4a、增幅齿轮二3
‑
4b、分动齿轮一3
‑
5a、分动齿轮二3
‑
5b、从动齿轮3
‑
6、双联齿轮3
‑
7、主动齿轮3
‑
8、底座3
‑
9和电机3
‑
10。顶盖3
‑
1与底座3
‑
9相配合,主要用于支承、连接及约束可动部件。连杆3
‑
3,用于连接从动齿轮3
‑
6与分动齿轮一3
‑
5a,将从动齿轮3
‑
6的旋转运动转化为摆动形式的往复运动。增幅齿轮一3
‑
4a和增幅齿轮二3
‑
4b,用于放大扑翼驱动机构输出振幅。分动齿轮一3
‑
5a与连杆3
‑
3、从动齿轮3
‑
6配合,将从动齿轮3
‑
6的旋转运动转化为摆动形式的往复运动。分动齿轮二3
‑
5b与分动齿轮一3
‑
5a配合。从动齿轮3
‑
6与双联齿轮3
‑
7的小齿轮3
‑7‑
1配合,实现二级减速,同时,借助连杆3
‑
3驱动分动齿轮一3
‑
5a摆动。双联齿轮3
‑
7的大齿轮3
‑7‑
3与主动齿轮3
‑
8配合实现一级减速,同时小齿轮3
‑7‑
1与从动齿轮3
‑
6配合实现二级减速,双联齿轮3
‑
7能够有效提高传动比。主动齿轮3
‑
8将电机的动力输入扑翼驱动机构。本发明所述的扑翼驱动机构,采用两级齿轮减速机构,能够有效提升齿轮传动机构输出扭矩,将电机实际工况调节至理想工作区间。分动齿轮组将单一摆动输出转化为双组同步反向输出。此外,增幅齿轮分别与分动齿轮配合,提高扑动机构输出振幅最终实现提高升力的目的。本发明中所述的扑动机构主要由齿轮构成,这种设计有利于采用微纳加工工艺制备扑动机构零部件,减小了整体机构的体积和重量。
49.如图6所示,顶盖3
‑
1上部开设有轴孔3
‑1‑
1a、轴孔3
‑1‑
1b、轴孔3
‑1‑
2a和轴孔3
‑1‑
2b,底部开设有轴孔3
‑1‑
3和轴孔3
‑1‑
4。销钉3
‑
2a和3
‑
2b的构造相同,其上具有钉柱。连杆3
‑
3两端开设有轴孔3
‑3‑
1a和轴孔3
‑3‑
1b。增幅齿轮一3
‑
4a和增幅齿轮二3
‑
4b的构造相同,均为标准直齿轮,其中心设有轴孔3
‑4‑
1。分动齿轮3
‑
5a一和分动齿轮二3
‑
5b的构造相同,为标准直齿轮,其上设有轴孔3
‑5‑
1和轴孔3
‑5‑
2,其中轴孔3
‑5‑
2位于中心,且其齿数明显大于增幅齿轮一3
‑
4a、增幅齿轮二3
‑
4b。从动齿轮3
‑
6上同样设有轴孔3
‑6‑
1、轴孔3
‑6‑
2,其中轴孔3
‑6‑
2位于中心。双联齿轮3
‑
7由大齿轮3
‑7‑
3(即下层齿轮)与小齿轮3
‑7‑
1(即上层齿轮)串联一体成型,其中心设有轴孔3
‑7‑
2。主动齿轮3
‑
8中心设有轴孔3
‑8‑
1,用于安装电机轴。底座3
‑
9上开设有轴孔3
‑9‑
1a和轴孔3
‑9‑
1b,转轴3
‑9‑
2a、转轴3
‑9‑
2b、转轴3
‑9‑
4、转轴3
‑9‑
5,电机安装孔3
‑9‑
3以及底部的u形舵机安装卡口3
‑9‑
6a、3
‑9‑
6b。电机3
‑
10上具有电机轴3
‑
10
‑
1。电机3
‑
10装于底座3
‑
9上的电机安装孔3
‑9‑
3内,并通过过盈配合固定,且其上的电机轴3
‑
10
‑
1与主动齿轮3
‑
8中心轴孔3
‑8‑
1过盈配合。双联齿轮3
‑
7中心的轴孔3
‑7‑
2与转轴3
‑9‑
4间隙配合,从动齿轮3
‑
6上的轴孔3
‑6‑
1与底座3
‑
9上的转轴3
‑9‑
5间隙配合。同时,双联齿轮3
‑
7上的下层齿轮3
‑7‑
3与主动齿轮3
‑
8啮合,上层齿轮3
‑7‑
1与从动齿轮3
‑
6啮合。底座3
‑
9上的转轴3
‑9‑
2a与分动齿轮一3
‑
5a上的轴孔3
‑5‑
2间隙配合,并插入顶盖3
‑
1的轴孔3
‑1‑
2a并与之过盈配合。转轴3
‑9‑
2b与分动齿轮二3
‑
5b上的轴孔3
‑5‑
2间隙配合,并插入顶盖3
‑
1的轴孔3
‑1‑
2b并与之过盈配合。分动齿轮一3
‑
5a、分动齿轮二3
‑
5b相互啮合。传动轴二1
‑
7a依次穿过顶盖3
‑
1的轴孔3
‑1‑
1a,增幅齿轮3
‑
4a的轴孔3
‑4‑
1以及底座3
‑
9的轴
孔3
‑9‑
1a,并且与增幅齿轮3
‑
4a的轴孔3
‑4‑
1间过盈合,与轴孔3
‑1‑
1a、轴孔3
‑9‑
1a间隙配合。传动轴四1
‑
7b依次穿过顶盖3
‑
1的轴孔3
‑1‑
1b,增幅齿轮二3
‑
4b的轴孔3
‑4‑
1以及底座3
‑
9的轴孔3
‑9‑
1b,并且与增幅齿轮二3
‑
4b的轴孔3
‑4‑
1间过盈合,与轴孔3
‑1‑
1b、轴孔3
‑9‑
1b间隙配合。同时,增幅齿轮一3
‑
4a与分动齿轮3
‑
5a相互啮合。增幅齿轮二3
‑
4b与分动齿轮二3
‑
5b相互啮合。此外,销钉3
‑
2a、销钉3
‑
2b的钉柱分别与连杆3
‑
3两端的轴孔3
‑3‑
1a、3
‑3‑
1b间隙配合,同时分别与从动齿轮3
‑
6上的轴孔3
‑6‑
2、分动齿轮3
‑
5a上的轴孔3
‑5‑
1过盈配合。销钉3
‑
2a、销钉3
‑
2b,连杆3
‑
3,分动齿轮3
‑
5a,从动齿轮3
‑
6构成曲柄连杆机构。当从动齿轮3
‑
6旋转时,连杆3
‑
3在销钉3
‑
2a、3
‑
2b约束下将驱动分动齿轮3
‑
5a往复摆动。当电机3
‑
10驱动主动齿轮3
‑
8转动时,在双联齿轮3
‑
7的传动作用下,从动齿轮3
‑
6将同步转动。同时,分动齿轮一3
‑
5a往复摆动,由于分动齿轮一3
‑
5a、分动齿轮二3
‑
5b相互啮合,分动齿轮一3
‑
5a与分动齿轮二3
‑
5b等速反向同步摆动。由于增幅齿轮一3
‑
4a、增幅齿轮二3
‑
4b分别与分动齿轮一3
‑
5a、分动齿轮二3
‑
5b相互啮合,且增幅齿轮一3
‑
4a、增幅齿轮二3
‑
4b齿数远小于分动齿轮一3
‑
5a、分动齿轮二3
‑
5b,增幅齿轮一3
‑
4a、增幅齿轮二3
‑
4b与分动齿轮一3
‑
5a、分动齿轮二3
‑
5b同步往复摆动,且振幅等比例放大。
50.舵机一1
‑
5a、舵机二1
‑
5b、舵机三1
‑
5c、舵机臂1
‑
4a、舵机臂二1
‑
4b、舵机臂三1
‑
10、推拉连杆1
‑
11和机尾1
‑
9组成飞行器的操纵系统。推拉连杆1
‑
11,用于连接舵机臂三和顶盖,并与之相互配合使机尾能够在舵机驱动作用下左右摆动,最终实现横滚自由度的姿态控制。如图5所示,舵机臂一1
‑
4a、舵机臂二1
‑
4b上具有舵机安装轴孔1
‑4‑
2与传动轴孔1
‑4‑
1。舵机一1
‑
5a、舵机二1
‑
5b、舵机三1
‑
5c的结构相同,其上具有舵机轴1
‑5‑
1。机尾1
‑
9顶端具有贯穿的轴孔1
‑9‑
1,底部具有u形舵机安装卡口1
‑9‑
2。舵机臂三1
‑
10上具有轴孔1
‑
10
‑
1和轴孔1
‑
10
‑
2。推拉连杆1
‑
11由轻质刚性材料一体折弯而成,其两端具有z形端1
‑
11
‑
1a和z形端1
‑
11
‑
1b。如图1所示,轴销1
‑
12穿过机尾1
‑
9顶部的轴孔1
‑9‑
1与之间隙配合,并穿过顶盖3
‑
1的轴孔3
‑1‑
3与之过盈配合。舵机一1
‑
5a、舵机二1
‑
5b、舵机三1
‑
5c分别装入底座3
‑
9的舵机安装卡口3
‑9‑
6a、3
‑9‑
6b以及机尾1
‑
9底部的舵机安装卡口1
‑9‑
2。舵机臂一1
‑
4a、舵机臂二1
‑
4b的舵机安装轴孔1
‑4‑
2以及舵机臂三1
‑
10的轴孔1
‑
10
‑
1分别与舵机一1
‑
5a、舵机二1
‑
5b、舵机三1
‑
5c的舵机轴1
‑5‑
1过盈配合。舵机臂一1
‑
4a、舵机臂二1
‑
4b上的传动轴孔1
‑4‑
1分别与传动轴一1
‑
3a、传动轴三1
‑
3b间隙配合。同时,推拉连杆1
‑
11的z形端1
‑
11
‑
1a、z形端1
‑
11
‑
1b分别穿入顶盖3
‑
1上的轴孔3
‑1‑
4以及舵机臂三1
‑
10末端的轴孔1
‑
10
‑
2,并分别进行间隙配合。
51.本发明还提出了一种上述可悬停仿生蜂鸟飞行器的操控方法,该操控方法通过倾转扑动平面和摆动机尾调节重心实现俯仰、横滚、偏航,三自由度飞行姿态控制。该操控方法包括以下步骤:
52.(1)横滚调节:如图7所示,当舵机臂三1
‑
10逆时针旋转时,在推拉连杆1
‑
11作用下,机尾1
‑
5c将向左摆动。因此,整机重心向左偏移进而产生向左倾转的姿态调节力矩;同理,当舵机臂三1
‑
10顺时针旋转时,在推拉连杆1
‑
11作用下,机尾1
‑
5c将向右摆动。因此,整机重心向右偏移进而产生向右倾转的姿态调节力矩。
53.(2)俯仰调节:如图8所示,当舵机一、舵机二分别驱动舵机臂一1
‑
4a、舵机臂二1
‑
4b同时小幅向y轴正方向倾转时,翅翼一1
‑
1a、翅翼二1
‑
1b扑动平面同步向后倾转,使升力作用方向向后倾转,进而产生使机身后仰的姿态调节力矩;当舵机一、舵机二分别驱动舵机
臂一1
‑
4a、舵机臂二1
‑
4b同时小幅向y轴负方向倾转时,翅翼一1
‑
1a、翅翼二1
‑
1b扑动平面同步向前倾转,使升力作用方向向前倾转,进而产生使机身前倾的姿态调节力矩。y轴正方向为机身后向,y轴负方向为机身前向。
54.(3)偏航调节:如图9所示,当舵机一驱动舵机臂一1
‑
4a小幅向y轴负方向倾转,舵机二驱动舵机臂二1
‑
4b小幅向y轴正方向倾转时,翅翼一1
‑
1a扑动平面向前倾转,翅翼二1
‑
1b扑动平面向后倾转,同时产生使机身向右偏航的航向调节力矩;当舵机一驱动舵机臂一1
‑
4a小幅向y轴正方向倾转,舵机二驱动舵机臂二1
‑
4b小幅向y轴负方向倾转时,翅翼一1
‑
1a扑动平面向后倾转,翅翼二1
‑
1b扑动平面向前倾转,同时产生使机身向左偏航的航向调节力矩。
55.本发明所述的可悬停仿生蜂鸟飞行器,其采用一只直流电机驱动翅翼扑动,通过三只伺服舵机实现飞行操纵控制,能够实现可控悬停飞行。本发明通过增幅齿轮构造的大振幅扑翼驱动机构,通过一组齿轮相互啮合配合实现振幅放大,能够达到提高升力的效果;通过万向节来进行扑翼的动力传动,并结合舵机分别实现每个翅翼扑动平面的实时调节进而产生姿态调节力矩实现姿态控制;通过摆动尾部实现横滚自由度的姿态控制。
56.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。