1.本实用新型涉及无人机技术领域,尤其涉及一种环境监测无人机。
背景技术:
2.随着无人机技术的发展,越来越多的领域已经广泛采用无人机作为检测、勘察工具。现有技术中,通常通常在无人机上设置监测、勘察设备来对目标区域、建筑物等进行检测、勘察。比如,无人机搭载环境监测设备,在移动终端中规划目标监测区域,然后控制无人机在目标区域内飞行,以对目标区域进行环境监测。但是,现有技术中,都是将环境监测设备挂设在无人机上,这样一方面会给无人机的飞行稳定性带来影响,在环境监测设备处于非工作状态(比如升降、巡航等状态)时,外挂设备会带来额外的阻力,降低无人机的续航里程;另一方面,外挂环境监测设备,会增加无人机结构的复杂性,在非工作状态时,外挂环境监测设备的安装和拆卸非常不方便。
技术实现要素:
3.本实用新型所要解决的技术问题是针对上述现有技术的不足,提供一种环境监测无人机。
4.本实用新型解决上述技术问题的技术方案如下:一种环境监测无人机,包括无人机本体、环境探测组件和控制器,所述无人机本体的上部四周分别设有螺旋桨,所述无人机本体的下部两侧分别固定连接有支腿,所述无人机本体的顶部设有开口以及用于打开或关闭所述开口的盖板,所述环境探测组件通过驱动机构可拆卸设置在所述无人机本体内,且所述驱动机构可驱动所述环境探测组件从所述开口向上伸出无人机本体外,或驱动所述环境探测组件从所述无人机本体外经由所述开口缩进至所述无人机本体内,所述控制器设置与无人机本体内,且所述控制器分别与所述环境探测组件和驱动机构电连接。
5.本实用新型的有益效果是:本实用新型的环境监测无人机,通过在无人机本体的顶部设置可以打开或关闭的盖板,并有设置在无人机本体内的驱动机构驱动环境探测组件伸出或缩进无人机本体,这样可以在无人机飞行至目标区域后控制环境探测组件伸出无人机本体并进行探测,在其余飞行时间控制环境探测组件缩进无人机本体,大大提高了无人机的飞行稳定性,降低了无人机整个飞行过程中的阻力,大大延长了无人机续航里程,并且在不使用时可以将环境探测组件缩进无人机本体或者直接拆卸,结构简洁,外观漂亮,使用方便。
6.在上述技术方案的基础上,本实用新型还可以做如下改进:
7.进一步:所述环境探测组件包括球形的基座和多个环境探测传感器,所述基座的表面设有多个安装孔,多个所述环境探测传感器一一对应安装于所述安装孔内,所述基座安装于所述驱动机构的驱动端,且所述驱动机构可驱动所述基座连同设置于其上的多个环境探测传感器伸出所述无人机本体外,或驱动所述基座连同设置于其上的多个环境探测传感器经由所述开口缩进至所述无人机本体内。
8.上述进一步方案的有益效果是:通过将多个环境探测传感器安装于球形的基座上,这样可以在所述驱动机构驱动所述基座连同设置于其上的多个环境探测传感器伸出所述无人机本体外时同步对目标区域进行环境监测,并且通过球形基座,一方面可以借助所述驱动机构驱动基座转动,方便调整环境探测传感器的方位角度,另一方面球形基座的弧形表面可以进一步降低无人机在飞行过程中的飞行阻力,有利于进一步延长无人机的续航里程。
9.进一步:所述环境探测传感器为pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器中的一种或多种,所述pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器一一对应安装于所述安装孔内,所述pm2.5 传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器分别与所述控制器电连接。
10.上述进一步方案的有益效果是:通过将所述pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器一一对应安装在安装孔内,这样可以保证在飞行过程中,各传感器的位置和探测姿态保持相对稳定,准确采集目标区域的环境参数信息。
11.进一步:所述的环境监测无人机还包括摄像组件,所述摄像组件设置在所述基座内,且所述摄像组件的镜头镶嵌设置在所述基座表面的安装孔内,所述摄像组件与所述控制器电连接。
12.上述进一步方案的有益效果是:通过所述摄像组件可以实时获取目标区域的影像信息,便于地面监测实时了解目标区域的实时画面,并作为辅助信息对目标区域的环境进行综合评估。
13.进一步:所述环境探测组件还包括与所述基座相匹配的半球形透明罩,所述透明罩设置在所述基座的外周,所述透明罩与所述基座转动连接,且所述透明罩可相对于所述基座的外表面转动,并将所述环境探测传感器罩住或露出。
14.上述进一步方案的有益效果是:通过设置所述透明罩可以对各环境探测传感器进行保护,方便在监测过程中灵活调整,比如遇到雨水天气时,可以起到一定的遮挡效果,以提高各环境探测传感器的检测结果准确性和摄像组件获取画面的清晰度。
15.进一步:所述的环境监测无人机还包括第一驱动电机,所述基座与所述透明罩通过转轴转动连接,所述第一驱动电机与所述转轴传动连接,并可驱动所述转轴带动所述透明罩相对于所述基座转动,以将所述环境探测传感器罩住或露出。
16.上述进一步方案的有益效果是:通过所述第一驱动电机驱动所述转轴转动,所述转轴转动并带动所述透明罩相对于所述基座转动,从而实现自动调节所述透明罩的转动,便于远程进行操控。
17.进一步:所述驱动机构包括多个伸缩驱动杆、转动盘和第二驱动电机,所述第二驱动电机可拆卸设置在所述无人机本体的内部载体上,所述第二驱动电机的驱动端与所述转动盘传动连接,并可驱动所述转动盘水平转动,多个所述伸缩驱动杆均匀竖向阵列设置在所述转动盘上,且所述伸缩驱动杆的上端与所述基座的下部连接,所述伸缩驱动杆可驱动所述基座上下升降运动,所述第二驱动电机与驱动端与所述转动盘传动连接,并可驱动所述转动盘带动所述伸缩驱动杆连同所述转动盘周向转动。
18.上述进一步方案的有益效果是:通过所述第二驱动电机驱动所述转动盘水平周向转动,这样可以间接带动所述基座转动,进而调节环境监测换传感器的方位角度,同时,所述伸缩驱动杆同步伸缩运动,以驱动所述基座连同设置于其上的多个环境探测传感器伸出所述无人机本体外,或驱动所述基座连同设置于其上的多个环境探测传感器经由所述开口缩进至所述无人机本体内,这样可以提高无人机的飞行稳定性,并有效降低无人机在整个飞行过程中的阻力。
19.进一步:所述的环境监测无人机还包括超声波测距组件,所述超声波测距组件设置在所述无人机的前部,且所述超声波测距组件与所述控制器电连接。
20.上述进一步方案的有益效果是:通过设置所述超声波测距组件可以实时监测无人机前方是否有障碍物,以及障碍物的距离,这样方便无限极实现自动避障,确保无人机安全飞行。
21.进一步:所述的环境监测无人机,还包括无线通信电路,所述无线通信电路设置在所述无人机本体内,所述无线通信电路与所述控制器电连接,所述无线通信电路与地面终端无线连接。
22.上述进一步方案的有益效果是:通过所述无线通信电路方便地面终端与控制器进行远程通讯,方便将环境监测结果实时传输回地面终端,方便地面实时了解目标区域的环境参数信息。
附图说明
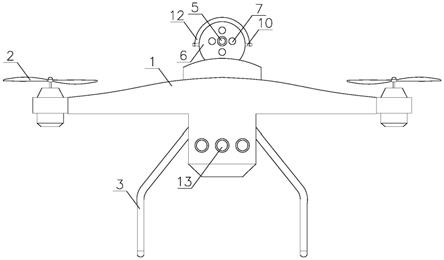
23.图1为本实用新型一实施例的环境监测无人机的环境探测组件缩进状态时结构示意图;
24.图2为本实用新型一实施例的环境监测无人机的环境探测组件伸出状态时结构示意图一;
25.图3为本实用新型一实施例的环境监测无人机的环境探测组件伸出状态时结构示意图二;
26.图4为本实用新型一实施例的驱动组件和环境监测组件局部结构示意图。
27.附图中,各标号所代表的部件列表如下:
28.1、无人机本体,2、螺旋桨,3、支腿,4、盖板,5、摄像组件,6、基座,7、环境探测传感器,8、伸缩驱动杆,9、转动盘,10、转轴,11、第二驱动电机,12、透明罩,13、超声波测距组件。
具体实施方式
29.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
30.如图1至图3所示,一种环境监测无人机,包括无人机本体1、环境探测组件和控制器,所述无人机本体1的上部四周分别设有螺旋桨2,所述无人机本体1的下部两侧分别固定连接有支腿3,所述无人机本体1的顶部设有开口以及用于打开或关闭所述开口的盖板4,所述环境探测组件通过驱动机构可拆卸设置在所述无人机本体1内,且所述驱动机构可驱动所述环境探测组件从所述开口向上伸出无人机本体1外,或驱动所述环境探测组件从所述无人机本体1外经由所述开口缩进至所述无人机本体1内,所述控制器设置与无人机本体1
内,且所述控制器分别与所述环境探测组件和驱动机构电连接。
31.本实用新型的环境监测无人机,通过在无人机本体1的顶部设置可以打开或关闭的盖板4,并有设置在无人机本体1内的驱动机构驱动环境探测组件伸出或缩进无人机本体1,这样可以在无人机飞行至目标区域后控制环境探测组件伸出无人机本体1并进行探测,在其余飞行时间控制环境探测组件缩进无人机本体1,大大提高了无人机的飞行稳定性,降低了无人机整个飞行过程中的阻力,大大延长了无人机续航里程,并且在不使用时可以将环境探测组件缩进无人机本体1或者直接拆卸,结构简洁,外观漂亮,使用方便。
32.这里,所述盖板4可以设置成手动开启,也设置设置成自动开启。开启后,所述盖板4可移动至无人机本体表面开口的一侧,当监测关闭后,将所述盖板4移动至开口位置处,以关闭所述开口。
33.如图4所示,在本实用新型的一个或多个实施例中,所述环境探测组件包括球形的基座6和多个环境探测传感器7,所述基座6的表面设有多个安装孔,多个所述环境探测传感器7一一对应安装于所述安装孔内,所述基座 6安装于所述驱动机构的驱动端,且所述驱动机构可驱动所述基座6连同设置于其上的多个环境探测传感器7伸出所述无人机本体1外,或驱动所述基座6连同设置于其上的多个环境探测传感器7经由所述开口缩进至所述无人机本体1内。通过将多个环境探测传感器7安装于球形的基座6上,这样可以在所述驱动机构驱动所述基座6连同设置于其上的多个环境探测传感器7 伸出所述无人机本体1外时同步对目标区域进行环境监测,并且通过球形基座6,一方面可以借助所述驱动机构驱动基座6转动,方便调整环境探测传感器7的方位角度,另一方面球形基座6的弧形表面可以进一步降低无人机在飞行过程中的飞行阻力,有利于进一步延长无人机的续航里程。
34.在本实用新型的一个或多个实施例中,所述环境探测传感器7为pm2.5 传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器中的一种或多种,所述pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器一一对应安装于所述安装孔内,所述pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器分别与所述控制器电连接。通过将所述pm2.5传感器、一氧化碳传感器、温湿度传感器、二氧化氮传感器、二氧化硫传感器、硫化氢传感器一一对应安装在安装孔内,这样可以保证在飞行过程中,各传感器的位置和探测姿态保持相对稳定,准确采集目标区域的环境参数信息。
35.实际中,根据环境监测需求,可以设置不同数量和目标监测参数的传感器,不限于本实用新型中列出的几种,这里不在一一列举。
36.可选地,在本实用新型的一个或多个实施例中,所述的环境监测无人机还包括摄像组件5,所述摄像组件5设置在所述基座6内,且所述摄像组件 5的镜头镶嵌设置在所述基座6表面的安装孔内,所述摄像组件5与所述控制器电连接。通过所述摄像组件5可以实时获取目标区域的影像信息,便于地面监测实时了解目标区域的实时画面,并作为辅助信息对目标区域的环境进行综合评估。
37.这里,配合所述驱动机构可以调节所述摄像组件5的方位角度,以更全面获取目标区域的影像信息。
38.可选地,在本实用新型的一个或多个实施例中,所述环境探测组件还包括与所述基座6相匹配的半球形透明罩12,所述透明罩12设置在所述基座 6的外周,所述透明罩12与
所述基座6转动连接,且所述透明罩12可相对于所述基座6的外表面转动,并将所述环境探测传感器7罩住或露出。通过设置所述透明罩12可以对各环境探测传感器进行保护,方便在监测过程中灵活调整,比如遇到雨水天气时,可以起到一定的遮挡效果,以提高各环境探测传感器的检测结果准确性和摄像组件5获取画面的清晰度。
39.在本实用新型的一个或多个实施例中,所述的环境监测无人机还包括第一驱动电机,所述基座6与所述透明罩12通过转轴10转动连接,所述第一驱动电机与所述转轴10传动连接,并可驱动所述转轴10带动所述透明罩12 相对于所述基座6转动,以将所述环境探测传感器7罩住或露出。通过所述第一驱动电机驱动所述转轴10转动,所述转轴10转动并带动所述透明罩12 相对于所述基座6转动,从而实现自动调节所述透明罩12的转动,便于远程进行操控。
40.如图4所示,在本实用新型的一个或多个实施例中,所述驱动机构包括多个伸缩驱动杆8、转动盘9和第二驱动电机11,所述第二驱动电机11可拆卸设置在所述无人机本体1的内部载体上,所述第二驱动电机11的驱动端与所述转动盘9传动连接,并可驱动所述转动盘9水平转动,多个所述伸缩驱动杆8均匀竖向阵列设置在所述转动盘9上,且所述伸缩驱动杆8的上端与所述基座6的下部连接,所述伸缩驱动杆8可驱动所述基座6上下升降运动,所述第二驱动电机11与驱动端与所述转动盘9传动连接,并可驱动所述转动盘9带动所述伸缩驱动杆8连同所述转动盘9周向转动。通过所述第二驱动电机11驱动所述转动盘9水平周向转动,这样可以间接带动所述基座6转动,进而调节环境监测换传感器7的方位角度,同时,所述伸缩驱动杆8同步伸缩运动,以驱动所述基座6连同设置于其上的多个环境探测传感器7伸出所述无人机本体1外,或驱动所述基座6连同设置于其上的多个环境探测传感器7经由所述开口缩进至所述无人机本体1内,这样可以提高无人机的飞行稳定性,并有效降低无人机在整个飞行过程中的阻力。
41.可选地,在本实用新型的一个或多个实施例中,所述的环境监测无人机还包括超声波测距组件13,所述超声波测距组件13设置在所述无人机的前部,且所述超声波测距组件13与所述控制器电连接。通过设置所述超声波测距组件13可以实时监测无人机前方是否有障碍物,以及障碍物的距离,这样方便无限极实现自动避障,确保无人机安全飞行。这里,所述超声波测距组件采用现有的超声波传感器即可。
42.可选地,在本实用新型的一个或多个实施例中,所述的环境监测无人机,还包括无线通信电路,所述无线通信电路设置在所述无人机本体1内,所述无线通信电路与所述控制器电连接,所述无线通信电路与地面终端无线连接。通过所述无线通信电路方便地面终端与控制器进行远程通讯,方便将环境监测结果实时传输回地面终端,方便地面实时了解目标区域的环境参数信息。这里所述无线通信电路优选采用现有的gprs通信模块。
43.本实用新型的实施例中,所述控制器采用现有的单片机即可,比如51 系列单片机等,整个电路部分的供电共用无人的续航电源。
44.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。