1.本发明涉及一种飞行器,尤其一种全电动的、可垂直地起飞和降落(vertical take-off and landing,vtol)的飞行器,以及一种用于生产这种飞行器的有利的方法。
背景技术:
2.vtol在航空航天技术中跨语言地指如下任何类型的飞机、无人机或火箭,其能够基本垂直地且无需起飞和降落跑道的情况下升起和再次着陆。这个通称术语在下文中被广义地使用,其不仅包括带有机翼的固定翼飞机,而且同样包括旋翼飞机(如直升旋翼机、自转旋翼机、螺旋桨旋翼机)和混合式飞机(如复合式直升旋翼机或组合式旋翼机)以及可垂直升降的飞机。此外,还包括能够在特别短的距离内起飞和降落(short take-off and landing,stol)、在短的距离内起飞但垂直地降落(short take-off and vertical landing,stovl)、或垂直地起飞但水平地降落(vertical take-off and horizontal landing,vthl)的飞行器。
3.cn 104691751 a公开了一种具有轴颈结构和槽缝结构的可靠的、三角支撑的且重量轻的多旋翼飞行器,该多旋翼飞行器由机身、旋翼、被布置在机身中心的飞行控制模块、以及经整合的线缆束状的连接管线构成。机身包括水平的结构板以及多个轻的、竖直的结构板,这些结构板藉由轴颈和槽缝被连接成三角形的承载结构,该三角形的承载结构的外侧形成框架并且该框架的内侧以相反的角度被承载。旋翼在竖直方向上被布置在竖直的板最外侧的交点处,而水平的板与框架的竖直的表面相连接并且被用于紧固。在水平的板中设计有多个圆形的旋翼孔(这些旋翼孔保护旋翼且其直径略大于旋翼的直径),其方式为将旋翼驱动轴作为圆中心点。最后,在各个竖直的板和水平的板的接触点处布置多个轴颈,这些轴颈是与槽缝对应地设置的,将这些槽缝与轴颈相连接。
技术实现要素:
4.本发明提供一种飞行器(尤其全电动的、如上所述可垂直地起飞和降落的飞行器)、以及一种用于生产这种飞行器的方法。
5.根据本发明的方案基于这样的认识,即:可以在城市环境中使用的vtol飞行器需要在不同的位置和取向上的驱动单元,这些驱动单元一方面能够应对每个飞行阶段(起飞、爬升、巡航以及降落),但另一方面不超过可操作的单独部件的数量。
6.在此,为了向上推进飞行器,代替自由运转的旋翼而提出被整合到机翼中的涵道螺旋桨(ducted fans),该涵道螺旋桨在航空技术之外例如是从气垫船或风扇艇已知的。空气通道(duct)——下文被称作涵道——的圆柱形的壳体减小了由于在这样的涵道螺旋桨的叶尖处的涡流而产生的推进损耗。
7.根据本发明,涵道设有凹口,这些凹口允许涵道模块式地——即根据组合原则或模块化原则——设置有对于相应的螺旋桨驱动器的结构变体和旋转方向而言经优化的导向格栅(stator)。相同的构思可以在另外的结构变体中使用,从而使得可以任意地组合涵
道和特定的导向格栅,以实现节省成本。
8.本发明的其他有利的设计方案在下文中给出。因此,导向格栅能够材料配合地被接合到这些凹口中并且尤其被粘合到这些凹口中。通过在壳体上使用这种普遍的“粘合车间(klebegarage)”可以在不同的实施方式中成本有效地生产并且普遍地使用特定的导向格栅/定子变体。
9.总体上,本发明在此公开下述1和10的技术方案,下述2-9为本发明的优选技术方案:
10.1.一种飞行器,
11.其特征在于:
[0012]-该飞行器具有机翼(10),该机翼具有整合的涵道螺旋桨(11-20),并且
[0013]-这些涵道螺旋桨(11-20)分别具有带有凹口(20)的涵道(11,14)以及被接合到凹口(20)中的导向格栅(12)。
[0014]
2.根据前述1所述的飞行器,
[0015]
其特征在于:
[0016]-所述导向格栅(12)材料配合地被接合到所述凹口(20)中。
[0017]
3.根据前述2所述的飞行器,
[0018]
其特征在于:
[0019]-所述导向格栅(12)被粘合到所述凹口(20)中。
[0020]
4.根据前述1至3之一所述的飞行器,
[0021]
其特征在于:
[0022]-这些涵道螺旋桨(11-20)具有该涵道(11,14)的不同的结构变体(x,y),并且
[0023]-所述凹口(20)具有在所有结构变体(x,y)之间一致的形状。
[0024]
5.根据前述4所述的飞行器,
[0025]
其特征在于:
[0026]-该形状是等腰梯形,并且
[0027]-所述凹口(20)被成对地布置在该涵道(11,14)的正相对的位置上。
[0028]
6.根据前述1至5之一所述的飞行器,
[0029]
其特征在于:
[0030]-所述涵道区域(11,14)分别具有环绕的刚性环(17,18,19)。
[0031]
7.根据前述6所述的飞行器,
[0032]
其特征在于:
[0033]-所述涵道(11,14)分别由入口区域(11)和出口区域(14)组合而成,并且
[0034]-所述出口区域(14)承载所述刚性环(17,18,19)并且具有所述凹口(20)。
[0035]
8.根据前述1至7之一所述的飞行器,
[0036]
其特征在于:
[0037]-所述涵道(11,14)具有带有插入件的蜂窝芯,并且
[0038]-所述涵道(11,14)多层地被涂覆以碳纤维增强的塑料。
[0039]
9.根据前述1至8之一所述的飞行器,
[0040]
其特征在于:
[0041]-这些涵道螺旋桨(11-20)具有由该导向格栅(12)承载的电动马达(13)。
[0042]
10.一种用于生产根据前述1至9之一所述的飞行器的方法,其特征在于:
[0043]-导向格栅(12)被接合到涵道(11,14)的凹口(20)中,并且
[0044]-涵道螺旋桨(11-20)在不同的安装位置被插入到机翼(10)中。
附图说明
[0045]
在附图中展示并且在下文中更详细地描述本发明的实施例。
[0046]
图1示出具有半透明的板和外蒙皮的机翼的等距视图。
[0047]
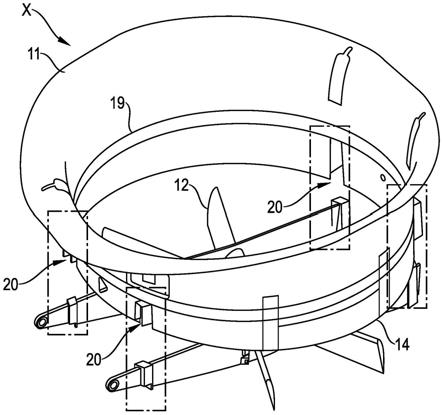
图2示出不具有马达的机翼的涵道螺旋桨的等距视图。
[0048]
图3示出与图2相对应的从高处看的视图。
[0049]
图4示出具有部分透明的入口和出口的螺旋桨的等距视图。
[0050]
图5示出在两个不同的结构变体中的两个涵道部件的正视图。
[0051]
图6示出在根据图5的变体中的涵道和导向格栅的等距视图。
[0052]
图7详细地示出根据本发明的涵道和导向格栅的接合连接。
[0053]
图8示出在根据图5的其他变体中的涵道和导向格栅的等距视图。
具体实施方式
[0054]
图1展示了用于选择性地完全自主的或手动控制的飞行器的机翼(10)的结构,该机翼被梁和肋部大致分成四个象限。在这四个象限中的三个象限中分别整合有涵道螺旋桨,该涵道螺旋桨的布置在涵道(11)内的导向格栅(12)承载中央的电动马达(13)。为此,这三个圆柱形的电动马达(13)均径向地与相应的导向格栅(12)相拧接,其方式为使得该导向格栅的由碳纤维增强的塑料(cfk)制成的支柱能够以轴对称且旋转对称的布置方式从相对的侧面承载电动马达(13)。
[0055]
在所展示的配置中,每个导向格栅(12)的这些支柱中的两个支柱彼此平行地沿机翼(10)的流动方向延伸并且切向地置于所属的电动马达(13)两侧。连接至颊板的各两个梁与相应其他颊板的与马达(13)正相对的梁互相补充形成英式十字或倾斜十字并且加固电动马达(13),使得导向格栅(12)吸收在马达平面上的所有水平力。如可以隐约从图示中看到的,导向格栅(12)的支柱为此具有与电动马达(13)的高度大约相对应的宽度。
[0056]
图2和图3展示了涵道(11)的不同的结构变体(x,y)。可以通过在图4中借助结构变体y所展示的、以及在图5中通过变体x和变体y的相对位置所展示的模块化系统来实现该变体方案:涵道(在此:11,14)由入口区域(11)和出口区域(14)组合而成,它们藉由环绕的环(17,18,19——图4)被加固。
[0057]
图6借助结构变体y的示例性的涵道(在此:11,14,19)将观察者的注意力转向导向格栅(12)的对本发明必要的接合连接。为此,本实施方式的涵道(11,14,19)的出口区域(14)具有两对分别正相对的凹口(20),所属的导向格栅(12)可以根据图示从下方接合到这些凹口中。
[0058]
图7以细节图示展示了该制造步骤。所示出的凹口(20)大约具有——在该视图中可以清楚地看到——等腰梯形的形状,该等腰梯形的较长的底边通入到根据图示的出口区域(14)的下缘。导向格栅(12)的被接合到该凹口中的支柱具有互补的形状,该互补的形状
允许将被放置在出口区域(14)的下方的格栅(12)沿涵道的中心轴线向上地与该出口区域接合在一起并且粘合到该出口区域的凹口(20)中。
[0059]
结合图8展示了这种方案的优点:由于凹口(20)的在所有结构变体(x,y)之间一致的梯形形状,因此结构相同的导向格栅(12)可以被接合到变体y的涵道(11,14,19)的出口区域(14)中。
[0060]
螺旋桨的单独的涵道(11,14)例如能够由带有插入件(insert)的蜂窝芯组合而成并且然后优选多层地被涂覆以cfk。就本发明而言,cfk可以被理解成如下任何复合材料:在该复合材料中,碳纤维被嵌入到塑料基质中,该塑料基质用于连接纤维以及填充间隙。在此,在不背离本发明的范围的情况下,除了常规的环氧树脂,也可以考虑将其他的硬质塑料或热塑料作为基质。
[0061]
在本实施方式中,电动马达(13——图1)被实施为具有整合的控制器的、空气冷却的内部转子。应理解的是,在替代性设计方案中例如可以在不背离本发明的范围的情况下使用外部转子或液体冷却装置。例如duffy,michael等人公开了另外的示例性的选项:propulsion scaling methods the era of electric flight(电动飞行时代的推进缩放方法).见:2018aiaa/ieee electric aircraft technologies symposium(eats).ieee,2018.第1-23页。