1.本实用新型涉及海洋探测设备技术领域,尤其涉及一种基于大载重系留无人机回收的水下测深仪。
背景技术:
2.环境水利信息化建设、水体的情况勘探以及突发事件的应急救援等需要掌握水体的实时详细信息尤为重要,如水床深度、水床地貌、暗藏排污管道等;目前有通过无人机拖拽测深仪来进行海底探测。现有的无人机拖拽测深仪的过程中,测深仪一直处于不稳定状态,由于海面通常存在较大的气流以及水面下的暗流,使得测深仪在移动过程中产生大幅度的晃动,进而通过牵引绳影响无人机的正常飞行,无人机无法临时固定住测深仪,存在无人机坠落的安全隐患。因此,研发一种能测深仪遇流晃动时由无人机固定的基于大载重系留无人机回收的水下测深仪成为了急需解决的技术问题。
技术实现要素:
3.本实用新型为解决上述问题,提供了一种基于大载重系留无人机回收的水下测深仪。
4.本实用新型的技术方案,一种基于大载重系留无人机回收的水下测深仪,包括大载重系留无人机、牵引绳、固定架、测深仪以及控制器,所述大载重系留无人机设有与固定架相适应的回收槽,该回收槽的槽底设有收线器,所述牵引绳的两端分别连接收线器以及固定架;所述固定架与牵引绳连接的侧面还设有半圆形的衔铁,所述回收槽内还设有与衔铁相适应的电磁铁,该回收槽的槽口处设有向远离回收槽方向倾斜的导向板;所述测深仪连接设置在固定架的一侧;所述控制器信号连接大载重系留无人机、收线器以及电磁铁。
5.采用上述结构后,通过使用大载重系留无人机牵引测深仪,避免了普通无人机载重过低,无法运载测深仪的问题,且可以由自带的系留电缆持续供电,便于长时间悬停进行检测;当大载重系留无人机拖拽测深仪遇到意外时,在大载重系留无人机受到影响前及时启动收线器工作卷起牵引绳,将固定架以及测深仪拉入回收槽,避免测深仪影响导致大载重系留无人机坠落;通过设置倾斜的导向板,便于引导固定架以及测深仪进入回收槽,防止双方出现错位的情况;通过启动电磁铁吸住衔铁,与被卷紧的牵引绳配合防止固定架扭动,造成连接处损坏;实现了当测深仪因外力晃动剧烈时,及时将测深仪收起至回收槽,避免影响大载重系留无人机的正常飞行,排除了大载重系留无人机坠落的安全隐患。
6.作为本实用新型的进一步改进,所述固定架的两端均设有与固定架相垂直的连接臂;所述连接臂相向的一侧均设有连接槽;所述连接臂还设有第一螺栓孔以及连接螺栓,该第一螺栓孔设置在连接槽的槽底且延伸至连接臂相背的一侧;所述测深仪的两端插设于连接槽内,该测深仪设有与第一螺栓孔相对应的第二螺栓孔;所述连接螺栓依次穿过第一螺栓孔与第二螺栓孔连接连接臂以及测深仪。
7.采用上述结构后,通过将测深仪插入连接臂之间的连接槽内,同时连接螺栓依次
穿过第一螺栓孔与第二螺栓孔,完成测深仪与固定架的快捷连接;通过将测深仪从固定架上拆下,能将测深仪单独用于其他浅水水域的测量,增加测深仪的使用范围,提高了实用性。
8.作为本实用新型的进一步改进,所述固定架设有气囊槽,该气囊槽内设有高压气瓶以及上浮气囊;所述高压气瓶固定设置在气囊槽的槽底,所述上浮气囊设有进气阀以及泄气阀,该进气阀以及泄气阀均为电磁阀且信号连接控制器;所述进气阀连接高压气瓶的瓶口。
9.采用上述结构后,当测深仪在水下遭遇暗流时,通过开启进气阀,使高压气瓶中的空气进入上浮气囊,气囊膨胀从而带动测深仪快速浮上海面,避免进一步受到暗流影响。
10.作为本实用新型的进一步改进,所述气囊槽的槽口铰接设有相适应的盖板,该气囊槽的槽口还设有碰珠卡扣,所述盖板设有与碰珠卡扣相适应的卡块。
11.采用上述结构后,通过盖板覆盖气囊槽的槽口,保护上浮气囊在日常情况下不出现损坏;通过碰珠卡扣与卡块配合固定盖板,当上浮气囊充气时体积增大,挤压盖板至碰珠卡扣与卡块分离,进而上浮气囊从气囊槽中弹出,帮助测深仪快速上浮。
12.作为本实用新型的进一步改进,所述固定架还连接设有光电液位传感器,该光电液位传感器信号连接泄气阀。
13.采用上述结构后,通过光电液位传感器检测固定架以及测深仪是否已经浮上海面,当测深仪浮上海面后触发光电液位传感器,控制泄气阀开启将上浮气囊中的空气排出,减小后续回收时的阻力。
附图说明
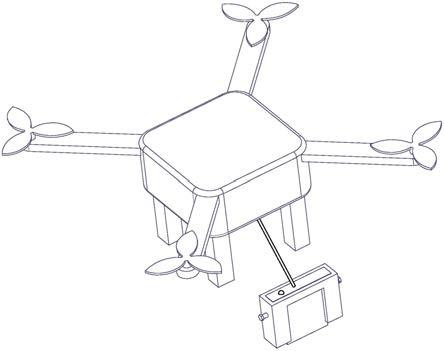
14.图1所示为本实用新型示意图。
15.图2所示为回收槽结构示意图。
16.图3所示为连接臂结构示意图。
17.图4所示为气囊槽结构示意图。
[0018]1‑
大载重系留无人机,2
‑
牵引绳,3
‑
固定架,4
‑
测深仪,5
‑
回收槽,6
‑
收线器,7
‑
衔铁, 8
‑
电磁铁,9
‑
导向板,10
‑
连接臂,11
‑
连接槽,12
‑
第一螺栓孔,13
‑
连接螺栓,14
‑
第二螺栓孔,15
‑
气囊槽,16
‑
高压气瓶,17
‑
上浮气囊,18
‑
进气阀,19
‑
泄气阀,20
‑
盖板,21
‑
碰珠卡扣,22
‑
卡块。
具体实施方式
[0019]
如图1
‑
图4所示一种基于大载重系留无人机回收的水下测深仪,包括大载重系留无人机1、牵引绳2、固定架3、测深仪4以及控制器,所述大载重系留无人机1设有与固定架3相适应的回收槽5,该回收槽5的槽底设有收线器6,所述牵引绳2的两端分别连接收线器6以及固定架3;所述固定架3与牵引绳2连接的侧面还设有半圆形的衔铁7,所述回收槽5内还设有与衔铁7相适应的电磁铁8,该回收槽5的槽口处设有向远离回收槽5方向倾斜的导向板9;所述测深仪4连接设置在固定架3的一侧;所述控制器信号连接大载重系留无人机1、收线器6以及电磁铁8。
[0020]
通过使用大载重系留无人机1牵引测深仪4,避免了普通无人机载重过低,无法运
载测深仪4的问题,且可以由自带的系留电缆持续供电,便于长时间悬停进行检测;当大载重系留无人机1拖拽测深仪4遇到意外时,在大载重系留无人机1受到影响前及时启动收线器6工作卷起牵引绳2,将固定架3以及测深仪4拉入回收槽5,避免测深仪4影响导致大载重系留无人机1坠落;通过设置倾斜的导向板9,便于引导固定架3以及测深仪4进入回收槽5,防止双方出现错位的情况;通过启动电磁铁8吸住衔铁7,与被卷紧的牵引绳2配合防止固定架3扭动,造成连接处损坏;实现了当测深仪4因外力晃动剧烈时,及时将测深仪 4收起至回收槽,避免影响大载重系留无人机1的正常飞行,排除了大载重系留无人机1坠落的安全隐患。
[0021]
所述固定架3的两端均设有与固定架3相垂直的连接臂10;所述连接臂10相向的一侧均设有连接槽11;所述连接臂10还设有第一螺栓孔12以及连接螺栓13,该第一螺栓孔 12设置在连接槽11的槽底且延伸至连接臂10相背的一侧;所述测深仪4的两端插设于连接槽11内,该测深仪4设有与第一螺栓孔12相对应的第二螺栓孔14;所述连接螺栓13依次穿过第一螺栓孔12与第二螺栓孔14连接连接臂10以及测深仪4。
[0022]
通过将测深仪4插入连接臂10之间的连接槽11内,同时连接螺栓13依次穿过第一螺栓孔12与第二螺栓孔14,完成测深仪4与固定架3的快捷连接;通过将测深仪4从固定架3上拆下,能将测深仪4单独用于其他浅水水域的测量,增加测深仪4的使用范围,提高了实用性。
[0023]
所述固定架3设有气囊槽15,该气囊槽15内设有高压气瓶16以及上浮气囊17;所述高压气瓶16固定设置在气囊槽15的槽底,所述上浮气囊17设有进气阀18以及泄气阀 19,该进气阀18以及泄气阀19均为电磁阀且信号连接控制器;所述进气阀18连接高压气瓶16的瓶口。
[0024]
当测深仪4在水下遭遇暗流时,通过开启进气阀18,使高压气瓶16中的空气进入上浮气囊17,气囊膨胀从而带动测深仪4快速浮上海面,避免进一步受到暗流影响。
[0025]
所述气囊槽15的槽口铰接设有相适应的盖板20,该气囊槽15的槽口还设有碰珠卡扣21,所述盖板20设有与碰珠卡扣21相适应的卡块22。
[0026]
通过盖板20覆盖气囊槽15的槽口,保护上浮气囊17在日常情况下不出现损坏;通过碰珠卡扣21与卡块22配合固定盖板20,当上浮气囊17充气时体积增大,挤压盖板20 至碰珠卡扣21与卡块22分离,进而上浮气囊17从气囊槽15中弹出,帮助测深仪4快速上浮。
[0027]
所述固定架3还连接设有光电液位传感器,该光电液位传感器信号连接泄气阀19。
[0028]
通过光电液位传感器检测固定架3以及测深仪4是否已经浮上海面,当测深仪4浮上海面后触发光电液位传感器,控制泄气阀19开启将上浮气囊17中的空气排出,减小后续回收时的阻力。