1.本实用新型涉及交通巡查技术领域,具体为交通智慧无人机巡检装置。
背景技术:
2.在道路设施的性能状态直接关系到城市交通安全和出行体验,因此探索与现阶段相匹配的精细化道路设施管理方式显得尤为重要,其中的关键环节是道路设施巡查,通过交通指挥无人机取代传统的人工巡查,大大简化了工作需求。
3.市场上的巡查工作通常是由人工来完成,不但工作量大、效率低,而且深受外在环境影响,为此,我们提出交通智慧无人机巡检装置。
技术实现要素:
4.本实用新型的目的在于提供交通智慧无人机巡检装置,以解决上述背景技术中提出的市场上的巡查工作通常是由人工来完成,不但工作量大、效率低,而且深受外在环境影响的问题。
5.为实现上述目的,本实用新型提供如下技术方案:交通智慧无人机巡检装置,包括:
6.巡查机身;
7.还包括:
8.摄像镜头,其镶嵌于所述巡查机身的上端;
9.支撑组件,其连接于所述巡查机身的左右两侧下端;
10.机翼组件,其设置于所述巡查机身的四角;
11.辅助承接架,其连接于所述巡查机身的下端中部,所述辅助承接架上端外侧固定有固定扣;
12.所述支撑组件包括:
13.支腿;
14.底杆,其固定于所述支腿的底端;
15.管套,其连接于所述底杆的前后两端,所述管套下端连接有垫脚;
16.连接箍,其包裹于所述底杆中部,所述连接箍外侧左右两端焊接有滑扣;
17.减震片,其连接于所述连接箍的下端,所述减震片上端分布有连接弹簧;
18.滑槽,其开设于所述减震片的左右两侧。
19.优选的,所述辅助承接架通过固定扣与巡查机身之间构成固定结构,且辅助承接架呈a字状。
20.优选的,所述支腿关于巡查机身竖直中轴线呈左右对称分布,且支腿与底杆之间呈垂直分布。
21.优选的,所述管套与底杆呈螺纹旋接,且管套与垫脚之间呈粘接,而且垫脚呈弹性连接。
22.优选的,所述连接箍内壁连接面与底杆外壁连接面相互贴合,且连接箍与支腿呈一体化结构。
23.优选的,所述减震片与连接弹簧之间呈弹性连接,且减震片通过滑槽、滑扣与连接箍之间构成滑动结构。
24.优选的,所述机翼组件包括:
25.固定座;
26.锁紧螺,其连接于所述固定座的外侧;
27.旋臂,其贯穿于所述锁紧螺的内部;
28.安装座,其设置于所述旋臂的顶端,所述安装座外侧镶嵌有夜光灯;
29.螺旋桨,其连接于所述安装座的底端。
30.优选的,所述旋臂通过锁紧螺与固定座之间构成固定结构,且旋臂设置有四个。
31.本实用新型提供了交通智慧无人机巡检装置,具备以下有益效果:该交通智慧无人机巡检装置,代替传统的人工巡查,大大提高了巡查效率,通过对底端的多重缓冲防护结构保证无人机的降落时的稳定程度,避免冲击力度较大折损机体器件;
32.该交通智慧无人机巡检装置设置有辅助承接架,巡查机身中部下端通过两个对称的固定扣固定有一个辅助承接架,该辅助承接架能够辅助巡查机身进行钩挂或者固定器件,可通过辅助承接架处进行安置一块负载镜头对该交通智慧无人机巡检装置巡查飞行过程中的摄像、记录、分析等;
33.该交通智慧无人机巡检装置设置有底杆,底杆前后两端螺旋固定有两个管套,下端设置有一块弹性垫脚,当无人机下降至地面时,通过该弹性垫脚直接接触地面,降低底杆的磨损,同时其弹性作用也能起到一定的缓冲减震的作用;
34.该交通智慧无人机巡检装置设置有减震片,连接箍下端连接有一块减震片,当无人机落下接触地面时,减震片直接接触地面,进而压缩连接弹簧,此时减震片顺应滑槽向上滑动,使得两者之间通过连接弹簧进行弹性支撑,进一步降低机体的震动程度,避免下降冲力较大导致无人机受损。
附图说明
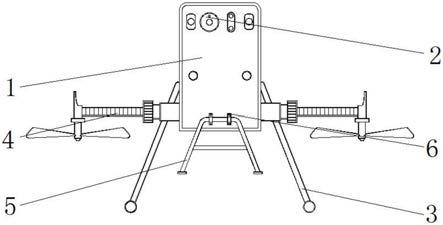
35.图1为本实用新型整体结构示意图;
36.图2为本实用新型侧视结构示意图;
37.图3为本实用新型底杆与连接箍连接结构示意图;
38.图中:1、巡查机身;2、摄像镜头;3、支撑组件;301、支腿;302、底杆;303、管套;304、垫脚;305、连接箍;306、滑扣;307、减震片;308、连接弹簧;309、滑槽;4、机翼组件;401、固定座;402、锁紧螺;403、旋臂;404、安装座;405、夜光灯;406、螺旋桨;5、辅助承接架;6、固定扣。
具体实施方式
39.如图1所示,交通智慧无人机巡检装置,包括:巡查机身1;还包括:摄像镜头2,其镶嵌于巡查机身1的上端;支撑组件3,其连接于巡查机身1的左右两侧下端;机翼组件4,其设置于巡查机身1的四角;辅助承接架5,其连接于巡查机身1的下端中部,辅助承接架5上端外
侧固定有固定扣6,辅助承接架5通过固定扣6与巡查机身1之间构成固定结构,且辅助承接架5呈a字状,巡查机身1中部下端通过两个对称的固定扣6固定有一个辅助承接架5,该辅助承接架5能够辅助巡查机身1进行钩挂或者固定器件,可通过辅助承接架5处进行安置一块负载镜头对该交通智慧无人机巡检装置巡查飞行过程中的摄像、记录、分析等。
40.如图2所示,固定座401;锁紧螺402,其连接于固定座401的外侧;旋臂403,其贯穿于锁紧螺402的内部,旋臂403通过锁紧螺402与固定座401之间构成固定结构,且旋臂403设置有四个,四个旋臂403分别等距离设置于巡查机身1的四角位置,使得其顶端下侧的螺旋桨406高频转动时使得该交通智慧无人机巡检装置保持平衡;安装座404,其设置于旋臂403的顶端,安装座404外侧镶嵌有夜光灯405;螺旋桨406,其连接于安装座404的底端。支腿301;底杆302,其固定于支腿301的底端,支腿301关于巡查机身1竖直中轴线呈左右对称分布,且支腿301与底杆302之间呈垂直分布,巡查机身1左右两端设置有两条对称分布的支腿301,用于承接整个无人机巡查装置,当其下降至地面停止时,通过支腿301及其下端连接件进行支撑稳定;管套303,其连接于底杆302的前后两端,管套303下端连接有垫脚304,管套303与底杆302呈螺纹旋接,且管套303与垫脚304之间呈粘接,而且垫脚304呈弹性连接,底杆302前后两端螺旋固定有两个管套303,下端设置有一块弹性垫脚304,当无人机下降至地面时,通过该弹性垫脚304直接接触地面,降低底杆302的磨损,同时其弹性作用也能起到一定的缓冲减震的作用。
41.如图3所示,连接箍305,其包裹于底杆302中部,连接箍305内壁连接面与底杆302外壁连接面相互贴合,且连接箍305与支腿301呈一体化结构,底杆302通过中部贯穿的连接箍305与支腿301相连接,而连接箍305通过螺栓限位固定在其中部,相应使用人员也能够通过螺栓拆卸对两者进行松脱,进而螺旋拆除底杆302一端的管套303即可对连接箍305脱离底杆302,便于针对器件进行拆卸进行维护以及更换;连接箍305外侧左右两端焊接有滑扣306;减震片307,其连接于连接箍305的下端,减震片307上端分布有连接弹簧308;滑槽309,其开设于减震片307的左右两侧,减震片307与连接弹簧308之间呈弹性连接,且减震片307通过滑槽309、滑扣306与连接箍305之间构成滑动结构,连接箍305下端连接有一块减震片307,当无人机落下接触地面时,减震片307直接接触地面,进而压缩连接弹簧308,此时减震片307顺应滑槽309向上滑动,使得两者之间通过连接弹簧308进行弹性支撑,进一步降低机体的震动程度,避免下降冲力较大导致无人机受损。
42.综上,该交通智慧无人机巡检装置,使用时,首先根据图1和图2中所示的结构,四个旋臂403分别等距离设置于巡查机身1的四角位置,使得其顶端下侧的螺旋桨406高频转动时使得该交通智慧无人机巡检装置保持平衡向上飞行,进而对巡逻区域进行巡查,并且巡查机身1中部下端通过两个对称的固定扣6固定有一个辅助承接架5,该辅助承接架5能够辅助巡查机身1进行钩挂或者固定器件,可通过辅助承接架5处进行安置一块广角负载镜头对该交通智慧无人机巡检装置巡查飞行过程中的摄像,监控巡逻区域内全方位信息,节省大量时间和人工成本,帮助巡查员规避危险环境,而当巡查完毕降落时,巡查机身1左右两端设置有两条对称分布的支腿301,用于承接整个无人机巡查装置,当其下降至地面停止时,通过支腿301及其下端连接件进行支撑稳定,而底杆302前后两端螺旋固定有两个管套303,下端设置有一块弹性垫脚304,当无人机下降至地面时,通过该弹性垫脚304直接接触地面,降低底杆302的磨损,同时其弹性作用也能起到一定的缓冲减震的作用,并且底杆302
通过中部贯穿的连接箍305与支腿301相连接,而连接箍305通过螺栓限位固定在其中部,相应使用人员也能够通过螺栓拆卸对两者进行松脱,进而螺旋拆除底杆302一端的管套303即可对连接箍305脱离底杆302,便于针对器件进行拆卸进行维护以及更换,相应连接箍305下端连接有一块减震片307,当无人机落下接触地面时,减震片307直接接触地面,进而压缩连接弹簧308,此时减震片307顺应滑槽309向上滑动,使得两者之间通过连接弹簧308进行弹性支撑,进一步降低机体的震动程度,避免下降冲力较大导致无人机受损,这样就完成了整个交通智慧无人机巡检装置的使用过程。