1.本实用新型涉及无人机测绘采集技术领域,具体为一种新型多功能无人机测绘采集系统。
背景技术:
2.测绘就是测量和绘图,是以计算机技术、光电技术、网络通讯技术、空间科学、信息科学为基础,以全球导航卫星定位系统(gnss)、遥感(rs)、地理信息系统(gis)为技术核心,选取地面已有的特征点和界线并通过测量手段获得反映地面现状的图形和位置信息,供工程建设、规划设计和行政管理之用,有时也通过在无人机上安装摄像头来进行测绘,而现有技术中的无人机测绘装置在下落时稳定性比较低,容易对无人机造成损坏,同时现有技术中对摄像头的固定效果也不好。
技术实现要素:
3.本实用新型的目的在于提供一种新型多功能无人机测绘采集系统,以解决上述背景技术中提出的而现有技术中的无人机测绘装置在下落时稳定性比较低,容易对无人机造成损坏的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种新型多功能无人机测绘采集系统,包括无人机本体和支腿,所述无人机本体的下方固接有多个支腿,所述无人机本体的下方安装有支撑装置;
5.所述支撑装置包括第一竖板、滑块、第二竖板和梯形块;
6.左右所述第一竖板的上方与无人机本体固定相连,所述第一竖板的滑槽处滑动卡接有滑块,所述滑块的外侧焊接有第二竖板,且第二竖板的下方一体成型设置有梯形块。
7.优选的,所述无人机本体的两端固接有多个支杆,且支杆的上方转动连接有螺旋桨,这样通过螺旋桨可以带动无人机本体飞行。
8.优选的,所述第一竖板的内侧内侧安装有固定装置;
9.所述固定装置包括横板、电动推杆、矩形块、卡块、挡板和弧形块;
10.左右所述横板的外侧与第一竖板焊接相连,所述横板的下方外侧固接有电动推杆,所述电动推杆的下方固接有矩形块,所述矩形块的前端面固接有卡块,所述卡块的外壁安装有挡板,且挡板的滑槽处内壁与卡块的外壁间隙配合,所述挡板的外侧通过转轴转动连接有弧形块,且弧形块的外侧与第一竖板固定相连。
11.优选的,所述挡板的内侧上方安装有弧形板,且弧形板的凹槽处内壁与挡板的外壁间隙配合,所述弧形板的上表面与无人机本体的外壁相贴合,所述弧形板的弧形槽处固接有摄像头,这样无人机本体配合摄像头可以进行测绘采集工作。
12.优选的,所述弧形板的上方安装有弹力装置;
13.所述弹力装置包括第一挡块、竖杆、第二挡块、箱体和弹簧;
14.左右所述第一挡块的下表面与弧形板的外壁相贴合,所述第一挡块的上方焊接有
竖杆,所述竖杆的上方固接有第二挡块,所述第二挡块的外壁安装有箱体,且箱体的内壁和开口处内壁分别与第二挡块和竖杆的外壁间隙配合,所述箱体的上方与横板固定相连,所述箱体的内部上方安装有弹簧,且弹簧的两端分别与箱体和第二挡块固定相连。
15.与现有技术相比,本实用新型的有益效果是:该新型多功能无人机测绘采集系统,通过支腿、第一竖板、滑块、第二竖板和梯形块等结构之间的相互配合,可以使梯形块通过第二竖板带动滑块移动,从而梯形块配合支腿可以使无人机本体在降落时更稳定;
16.通过弧形板、横板、电动推杆、矩形块、卡块、挡板和弧形块等结构之间的相互配合,可以通过电动推杆带动矩形块移动,矩形块通过卡块带动挡板转动,使挡板进入到弧形板的凹槽内,从而挡板通过弧形板将摄像头固定;
17.通过第一挡块、竖杆、第二挡块、箱体和弹簧等结构之间的相互配合,当弧形板通过第一挡块带动竖杆向上移动时,竖杆可以带动第二挡块移动,第二挡块配合箱体可以使弹簧发生弹性形变,从而通过弹簧的弹力性能可以进一步提高摄像头的稳定性。
附图说明
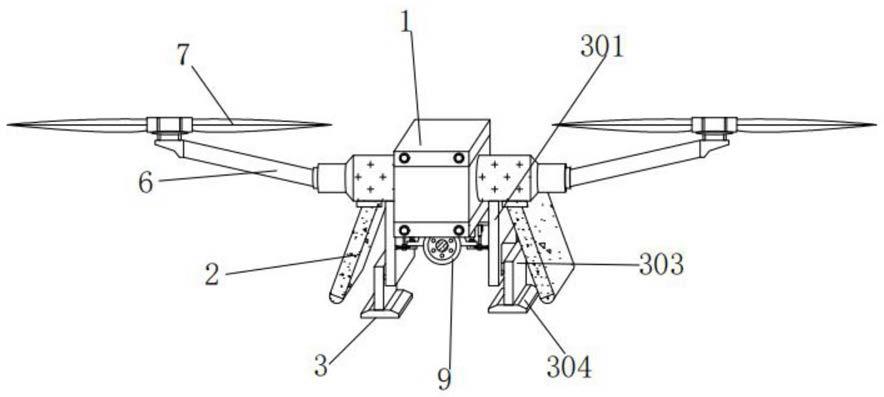
18.图1为本实用新型结构示意图;
19.图2为图1中的主视图;
20.图3为图2中电动推杆、挡板和弧形板处的结构示意图;
21.图4为图2中矩形块、卡块和弧形块处的结构示意图;
22.图5为图2中竖杆、箱体和弹簧处的结构示意图。
23.图中:1、无人机本体,2、支腿,3、支撑装置,301、第一竖板,302、滑块,303、第二竖板,304、梯形块,4、固定装置,401、横板,402、电动推杆,403、矩形块,404、卡块,405、挡板,406、弧形块,5、弹力装置,501、第一挡块,502、竖杆,503、第二挡块,504、箱体,505、弹簧,6、支杆,7、螺旋桨,8、弧形板,9、摄像头。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1
‑
5,本实用新型提供一种技术方案:一种新型多功能无人机测绘采集系统,包括无人机本体1和支腿2,无人机本体1的下方固接有2个支腿2,无人机本体1的下方安装有支撑装置3,支撑装置3包括第一竖板301、滑块302、第二竖板303和梯形块304,左右第一竖板301的上方与无人机本体1固定相连,第一竖板301的外侧加工有滑槽,第一竖板301的滑槽处滑动卡接有滑块302,滑块302的外侧焊接有第二竖板303,第二竖板303可以带动滑块302移动,且第二竖板303的下方一体成型设置有梯形块304,无人机本体1的两端固接有2个支杆6,且支杆6的上方转动连接有螺旋桨7。
26.第一竖板301的内侧内侧安装有固定装置4,固定装置4包括横板401、电动推杆402、矩形块403、卡块404、挡板405和弧形块406,左右横板401的外侧与第一竖板301焊接相连,横板401的下方外侧固接有电动推杆402,电动推杆402的型号为xtl,电动推杆402的下
方固接有矩形块403,矩形块403的前端面固接有卡块404,电动推杆402通过矩形块403可以带动卡块404移动,卡块404的外壁安装有挡板405,挡板405的中间加工有滑槽,且挡板405的滑槽处内壁与卡块404的外壁间隙配合,卡块404通过挡板405的滑槽可以带动其进行转动,挡板405的外侧通过转轴转动连接有弧形块406,且弧形块406的外侧与第一竖板301固定相连,挡板405的内侧上方安装有弧形板8,弧形板8的下方外侧加工有凹槽,且弧形板8的凹槽处内壁与挡板405的外壁间隙配合,挡板405通过弧形板8的凹槽可以将其抵紧固定,弧形板8的上表面与无人机本体1的外壁相贴合,弧形板8的弧形槽处固接有摄像头9。
27.弧形板8的上方安装有弹力装置5,弹力装置5包括第一挡块501、竖杆502、第二挡块503、箱体504和弹簧505,左右第一挡块501的下表面与弧形板8的外壁相贴合,第一挡块501的上方焊接有竖杆502,竖杆502的上方固接有第二挡块503,第二挡块503的外壁安装有箱体504,箱体504的下方加工有开口,且箱体504的内壁和开口处内壁分别与第二挡块503和竖杆502的外壁间隙配合,箱体504的上方与横板401固定相连,箱体504的内部上方安装有弹簧505,且弹簧505的两端分别与箱体504和第二挡块503固定相连。
28.在本实施例中,当操作人员需要使用新型多功能无人机测绘采集系统时,首先操作人员通过弧形板8带动摄像头9移动,使弧形板8的上方两端外壁与第一挡块501贴合,通过弧形板8带动第一挡块501向上移动,第一挡块501通过竖杆502带动第二挡块503移动,第二挡块503配合箱体504可以使弹簧505发生弹性形变,当弧形板8的上中间与无人机本体1的下表面相贴合后,接通电动推杆402的外接电源,启动电动推杆402,使电动推杆402带动矩形块403移动,矩形块403通过卡块404带动挡板405进行转动,从而使挡板405进入到弧形板8的凹槽内,进而通过挡板405和弹簧505的弹力性能等可以将弧形板8抵紧固定,这样无人机本体1配合摄像头9便可以进行测绘采集工作,当无人机本体1降落时,梯形块304先接触地面,梯形块304通过第二竖板303可以带动滑块302向上移动,同时第一竖板301通过滑槽可以对滑块302起限位作用,之后支腿2再与地面接触,这样便达到了使无人机本体1稳定降落的目的。
29.在本实用新型的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。