1.本实用新型属于无人机技术领域,尤其涉及一种光学与雷达侦测的可折翼微型无人机。
背景技术:
2.无人机空中侦测时,在遇到反制设备干扰情况下易发生坠机现象,现有的无人机采用折翼方式能够对旋翼进行一定的防护,降低损失与减小维修成本,但是其旋翼还是暴露在外,导致这种防护具有一定的局限性,防护效果并不是特别突出。为了解决上述问题,本实用新型设计了一种光学与雷达侦测的可折翼微型无人机,通过旋翼仓对旋翼进行隐藏防护,防护效果更好。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种光学与雷达侦测的可折翼微型无人机,大大提高了对微型无人机的机翼的保护功能。
4.技术方案:为实现上述目的,本实用新型的一种光学与雷达侦测的可折翼微型无人机,包括微型无人机本体,所述微型无人机本体具有与其飞行控制系统信号传输连接的光学探头和侦测雷达,所述微型无人机本体的机身底部开设有凹槽,所述光学探头及侦测雷达均设置于凹槽内;
5.还包括折叠驱动机构,具有旋翼的微型无人机本体的旋翼臂通过折叠驱动机构与微型无人机本体的机身侧面拐角位置连接,所述微型无人机本体的侧面设置有与旋翼一一对应的旋翼仓,所述折叠驱动机构驱动旋翼臂靠近机身侧面定点转动可使旋翼进入对应的旋翼仓内;
6.还包括气动反推降落支撑机构,所述气动反推降落支撑机构设置于微型无人机本体的机身底部,其通过气动反推作用辅助微型无人机本体降落并支撑处于落地状态的微型无人机本体。
7.进一步地,所述旋翼仓的侧面开设有与旋翼臂对应的预留缺口。
8.进一步地,所述折叠驱动机构包括上连板、下连板、竖向转轴、从动齿轮、主动齿轮和伺服电机;所述上连板与下连板均连接于机身侧面拐角位置,所述竖向转轴上端与上连板旋转,所述竖向转轴下端安装有所述从动齿轮,所述旋翼臂与竖向转轴连接,所述伺服电机安装于下连板上并与主动齿轮驱动连接,所述主动齿轮与从动齿轮相啮合。
9.进一步地,所述气动反推降落支撑机构包括出气筒、导气管和供气泵;所述出气筒开口朝下设置于机身底部,所述供气泵通过导气管向出气筒供气,且供气泵设置于凹槽内。
10.进一步地,所述出气筒的开口呈扩张状结构。
11.进一步地,所述伺服电机及供气泵均受所述微型无人机本体的飞行控制系统控制。
12.有益效果:本实用新型的一种光学与雷达侦测的可折翼微型无人机,有益效果为:
光学探头及侦测雷达均设置于凹槽内,实现对光学探头及侦测雷达的隐藏保护,在坠机故障下能够大大降低光学探头及侦测雷达触地损坏的几率;此外,旋翼能够折叠隐藏于对应的旋翼仓内,在坠机故障下能够对旋翼进行较好的防护;再者,通过气动反推降落支撑机构的设置能够使无人机稳定、可靠地降落,振动颠簸小,避免对无人机的各元器件造成振动损坏。
附图说明
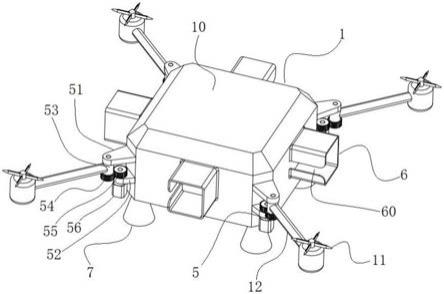
13.附图1为微型无人机的旋翼展开状态下的结构示意图一;
14.附图2为微型无人机的旋翼展开状态下的结构示意图二;
15.附图3为微型无人机的旋翼折叠状态下的结构示意图。
具体实施方式
16.下面结合附图对本实用新型作更进一步的说明。
17.如附图1所示,一种光学与雷达侦测的可折翼微型无人机,包括微型无人机本体1,所述微型无人机本体1具有与其飞行控制系统信号传输连接的光学探头2和侦测雷达3,所述微型无人机本体1的机身10底部开设有凹槽101,所述光学探头2及侦测雷达3均设置于凹槽101内,实现对光学探头2及侦测雷达3的隐藏保护,在坠机故障下,大大降低光学探头2及侦测雷达3触地损坏的几率。
18.还包括折叠驱动机构5,具有旋翼11的微型无人机本体1的旋翼臂12通过折叠驱动机构5与微型无人机本体1的机身10侧面拐角位置连接,所述微型无人机本体1的侧面设置有与旋翼11一一对应的旋翼仓6,所述折叠驱动机构5驱动旋翼臂12靠近机身10侧面定点转动可使旋翼11进入对应的旋翼仓6内,在坠机状下能够旋翼进行较好的隐藏防护,降低坠机维修成本。
19.还包括气动反推降落支撑机构7,所述气动反推降落支撑机构7设置于微型无人机本体1的机身10底部,其通过气动反推作用辅助微型无人机本体1降落并支撑处于落地状态的微型无人机本体1,能够使无人机稳定、可靠地降落,振动颠簸小,避免对无人机的各元器件造成振动损坏。
20.更具体的,所述旋翼仓6的侧面开设有与旋翼臂12对应的预留缺口60,给旋翼臂12进入,使旋翼11能够完全隐藏于旋翼仓6内,提高较好的防护。
21.更为具体的,所述折叠驱动机构5包括上连板51、下连板52、竖向转轴53、从动齿轮54、主动齿轮55和伺服电机56;所述上连板51与下连板52均连接于机身10侧面拐角位置,所述竖向转轴53上端与上连板51旋转,所述竖向转轴53下端安装有所述从动齿轮54,所述旋翼臂12与竖向转轴53连接,所述伺服电机56安装于下连板52上并与主动齿轮55驱动连接,所述主动齿轮55与从动齿轮54相啮合。所述气动反推降落支撑机构7包括出气筒71、导气管72和供气泵73;所述出气筒71开口朝下设置于机身10底部,所述供气泵73通过导气管72向出气筒71供气,且供气泵73设置于凹槽101内。所述伺服电机56及供气泵73均受所述微型无人机本体1的飞行控制系统控制。
22.值得注意的是,所述出气筒71的开口呈扩张状结构,保证出气反推的同时又能兼顾支撑稳定性。
23.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种光学与雷达侦测的可折翼微型无人机,其特征在于:包括微型无人机本体(1),所述微型无人机本体(1)具有与其飞行控制系统信号传输连接的光学探头(2)和侦测雷达(3),所述微型无人机本体(1)的机身(10)底部开设有凹槽(101),所述光学探头(2)及侦测雷达(3)均设置于凹槽(101)内;还包括折叠驱动机构(5),具有旋翼(11)的微型无人机本体(1)的旋翼臂(12)通过折叠驱动机构(5)与微型无人机本体(1)的机身(10)侧面拐角位置连接,所述微型无人机本体(1)的侧面设置有与旋翼(11)一一对应的旋翼仓(6),所述折叠驱动机构(5)驱动旋翼臂(12)靠近机身(10)侧面定点转动可使旋翼(11)进入对应的旋翼仓(6)内;还包括气动反推降落支撑机构(7),所述气动反推降落支撑机构(7)设置于微型无人机本体(1)的机身(10)底部,其通过气动反推作用辅助微型无人机本体(1)降落并支撑处于落地状态的微型无人机本体(1)。2.根据权利要求1所述的一种光学与雷达侦测的可折翼微型无人机,其特征在于:所述旋翼仓(6)的侧面开设有与旋翼臂(12)对应的预留缺口(60)。3.根据权利要求1所述的一种光学与雷达侦测的可折翼微型无人机,其特征在于:所述折叠驱动机构(5)包括上连板(51)、下连板(52)、竖向转轴(53)、从动齿轮(54)、主动齿轮(55)和伺服电机(56);所述上连板(51)与下连板(52)均连接于机身(10)侧面拐角位置,所述竖向转轴(53)上端与上连板(51)旋转,所述竖向转轴(53)下端安装有所述从动齿轮(54),所述旋翼臂(12)与竖向转轴(53)连接,所述伺服电机(56)安装于下连板(52)上并与主动齿轮(55)驱动连接,所述主动齿轮(55)与从动齿轮(54)相啮合。4.根据权利要求3所述的一种光学与雷达侦测的可折翼微型无人机,其特征在于:所述气动反推降落支撑机构(7)包括出气筒(71)、导气管(72)和供气泵(73);所述出气筒(71)开口朝下设置于机身(10)底部,所述供气泵(73)通过导气管(72)向出气筒(71)供气,且供气泵(73)设置于凹槽(101)内。5.根据权利要求4所述的一种光学与雷达侦测的可折翼微型无人机,其特征在于:所述出气筒(71)的开口呈扩张状结构。6.根据权利要求4所述的一种光学与雷达侦测的可折翼微型无人机,其特征在于:所述伺服电机(56)及供气泵(73)均受所述微型无人机本体(1)的飞行控制系统控制。
技术总结
本实用新型公开了一种光学与雷达侦测的可折翼微型无人机,包括微型无人机本体、折叠驱动机构和气动反推降落支撑机构;微型无人机本体的机身底部开设有凹槽,微型无人机本体具有的光学探头及侦测雷达均设置于凹槽内;微型无人机本体的旋翼臂通过折叠驱动机构与微型无人机本体的机身侧面拐角位置连接,微型无人机本体的侧面设置有与旋翼一一对应的旋翼仓,折叠驱动机构驱动旋翼臂靠近机身侧面定点转动可使旋翼进入对应的旋翼仓内;气动反推降落支撑机构设置于微型无人机本体的机身底部,其通过气动反推作用辅助微型无人机本体降落并支撑处于落地状态的微型无人机本体。本实用新型大大提高了对微型无人机的机翼的保护功能。型大大提高了对微型无人机的机翼的保护功能。型大大提高了对微型无人机的机翼的保护功能。
技术研发人员:苏颖 闫廷廷 嵇强
受保护的技术使用者:中交遥感载荷(江苏)科技有限公司
技术研发日:2021.03.09
技术公布日:2021/12/17