1.本实用新型涉及无人机技术领域,具体是指多场景功能覆盖旋翼无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”。是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按应用领域,可分为军用与民用;军用方面,无人机分为侦察机和靶机;民用方面,无人机行业应用,是无人机真正的刚需。
3.目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
4.随着科技不断地发展,市场对于无人机的需求急剧增加,但是目前市场需求各有不同,很难满足市场的需求及统一标准,通用性和拓展性不强,为此我们开发一个无人机飞行平台,使用者可以在平台上进行拓展使用,可以根据自己的需求定制不同功能的无人机飞行平台。
技术实现要素:
5.为解决现有技术中的不足,本实用新型提供多场景功能覆盖旋翼无人机,拓展性较强,可覆盖多个场景功能。
6.本实用新型为实现上述目的,通过以下技术方案实现:多场景功能覆盖旋翼无人机,包括机舱以及安装在机舱上的飞行控制单元、机臂、桨叶、脚架、电池架、无刷电机、双目相机、激光雷达和gps;
7.机臂通过紧固件连接在机舱侧面,机臂至少设置有四个且呈辐射状环绕于机舱外侧,每个机臂开口端位置均设有无刷电机;
8.桨叶与无刷电机连接并通过无刷电机旋转在机臂开口端位置;
9.脚架通过紧固件连接在无刷电机下方;
10.电池架通过铝柱连接在机舱下方,电池架用于搭载电池或安装载物模块。
11.作为优选,机臂内安装有电子调速器,电子调速器与无刷电机通过导线电性连接。
12.作为优选,机臂通过碳板拼接形成,并通过紧固件紧固。
13.机臂通过碳板拼接,利用碳板的重量轻,韧性较好,长时间使用不易变形,延长无人机机臂的使用寿命。
14.作为优选,脚架包括碳管和用于削减降落冲击力的减震器,减震器设置在碳管下端。
15.作为优选,减震器通过其包括的螺旋弹簧起到削减降落冲击力的作用。
16.作为优选,飞行控制单元包括飞行控制器、飞控减震支架和防尘保护壳,飞控减震支架设置在飞行控制器下方并用于支撑飞行控制器,飞行控制器、飞控减震支架位于防尘
保护壳内。
17.作为优选,机舱包括工业计算机、信号接收器和分电板。
18.工业计算机不仅可以完成相同的io引脚控制之外,还能运行有相应的操作系统,可以完成更复杂的任务管理与调度,能够支持更上层应用的开发,为了拓展使用提供了更广阔的应用空间。
19.作为优选,机舱侧面开设有孔,用于外部连接工业计算机进行程序的调试与控制。
20.载物模块下方预留了传感器和单目相机的安装位置,方便于无人机飞行平台的拓展使用。
21.对比现有技术,本实用新型的有益效果在于:可挂载电池仓能够扩展安装其他模块,可运用范围广,有较强的实用性,可用于挂载,运输和投递物品,方便操作人员把物品送到指定位置;减震器通过其包括的螺旋弹簧对机舱起到削减降落冲击力的作用;机臂通过碳板拼接,利用碳板的重量轻,韧性较好,长时间使用不易变形,延长无人机机臂的使用寿命。
附图说明
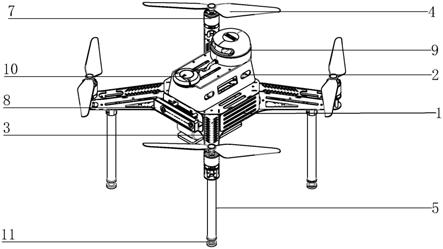
22.附图1为本实用新型第一立体结构示意图;
23.附图2为本实用新型第二立体结构示意图;
24.附图3为本实用新型右视图。
25.附图中所示标号:1、机舱,2、飞行控制单元,3、机臂,4、10寸桨叶,5、碳管,6、可挂载电池架,7、2216无刷电机,701、第一电机,702、第二电机,703、第三电机,704、第四电机,8、双目相机,9、激光雷达,10、gps,11、减震器、12、飞行控制器、13、飞控减震支架。
具体实施方式
26.下面结合具体实施例,进一步阐述本实用新型,如图1~3所示,多场景功能覆盖旋翼无人机,包括机舱1以及安装在机舱1内的飞行控制单元2、机臂3、桨叶4、脚架、电池架、无刷电机7、双目相机8、激光雷达9、gps,桨叶4为10寸桨叶44,无刷电机7型号为2216无刷电机7,机舱1包括工业计算机、信号接收器和分电板。
27.机臂3通过碳板拼接形成,并通过紧固件紧固,紧固件为铝柱,铝柱和铝柱连接方式为现有技术,在此不做赘述,机臂3通过紧固件连接在机舱1侧面,至少有四个且呈辐射状环绕机体,机臂3开口端位置设有2216无刷电机7,10寸桨叶4始终在机臂3开口端位置进行旋转;脚架5通过紧固件连接在2216无刷电机7下方,脚架包括碳管5和可以削减降落冲击力的减震器11;电池架通过铝柱连接在机舱1下面,减震器11包括螺旋弹簧,通过螺旋弹簧起到削减降落冲击力的作用。
28.飞行控制单元2包括飞行控制器12、飞控减震支架13和防尘保护壳,所述飞控减震支架13设置在飞行控制器12下方并用于支撑飞行控制器12,所述飞行控制器12、飞控减震支架13位于防尘保护壳内。
29.机舱侧面开设有孔,用于外部连接工业计算机进行程序的调试与控制,载物模块下方预留了传感器和单目相机的安装位置,方便于无人机飞行平台的拓展使用。
30.如附图1所示的一种多场景功能覆盖旋翼无人机可以满足飞行练习的需求。飞行
控制单元2通过信号接受器接受遥控器发送的遥控信号,经过飞控程序处理后,20a电子调速器根据及接收到的控制信号来控制各个2216无刷电机7的转速,带动10寸桨叶4的转动,从而达到控制飞行器动作的目的。同时,结合gps10获取位置信息的功能,可达到定点悬停的效果。
31.无人机飞行平台的多种飞行动作原理:
32.起飞降落动作:即垂直上升或下降,假设机头方向为沿x轴,调节电机转速,超过无人机自身重力时,将完成起飞动作;当小于自重时,将完成降落动作,控制过程中关键是要确保四个电机的转速是一样的,否则会打破无人机的稳定状态。
33.俯仰后退动作:即在空中前进或倒退,调节电机转速,保持无人机在纵向方向所受到的力相等,当增大第一电机701和第二电机702转速的同一时刻,减小或增大第三电机703和第四电机704的转速,无人机的机头就会抬高或下降,从而完成俯仰或后退动作。
34.翻滚动作;调节电机转速,保持无人机在纵向方向所受到的力相等。当增大或减小第一电机701和第四电机704转速的同一时刻,减小或增大第二电机702和第三电机703的转速,无人机就会围绕x轴翻转,从而完成翻滚动作。
35.偏航动作,同时增大或减小第一电机701和第三电机703转速,因为来自反方向的力矩作用,无人机将会围绕z轴逆转或正转,从而完成偏航动作。
36.如附图1所示的多场景功能覆盖旋翼无人机可以满足航拍的需求。所述gps10安装在无人机机架上,gps10通过连接线与飞行控制单元2相连,能够返回飞行高度和经纬度信息,作为航拍的依据。飞行控制单元2通过信号接受器接受遥控器发送的遥控信号,经过飞控程序处理后,由工业计算机对信号进行处理,控制相机进行拍照。所述多场景功能覆盖旋翼无人机下方拓展安装相机和云台,同时所述多场景功能覆盖旋翼无人机包括双目相机8,满足多角度航拍需求。
37.如附图1所示的多场景功能覆盖旋翼无人机可以自主飞行的需求。操作人员在地面站收发信号,利用所述多场景功能覆盖旋翼无人机的gps10进行精确定位,操作人员预先在设置好飞行路线、飞行速度、降落地点等,所述无人机飞行平台即可自主飞行。激光雷达9和双目相机8可对飞行路线上的障碍进行感知,将信息发送至工业计算机,经过处理后发送至飞行控制单元2,飞行控制单元2对信号处理后,发出控制信号,调整无人机的姿态、路线等,实现避障,达到安全控制与飞行效果。
38.如附图1所示的多场景功能覆盖旋翼无人机可以载物运输的需求。如附图3所述旋翼无人机可拓展安装载物模块,可用于挂载,运输和投递物品,方便操作人员把物品送到指定位置。例如当所述飞行控制单元2通过信号接受器收到遥控器所发送的遥控信号,经过飞行控制单元2处理,控制载物模块所涉及的执行机构进行工作,实现投递物品的效果。该作用可广泛运用于救灾、医疗、邮递等方面。
39.应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。