1.本实用新型涉及无人机技术领域,具体是一种水面救生无人机。
背景技术:
2.无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.现有的遥控救生圈,当救生员在远离岸边的地点,就需要手持遥控救生圈跑到岸边,在将遥控救生圈放到水中在进行遥控救援,相对于传统救生装置提高了不少,但也浪费了一些宝贵的时间,导致实施救援工作的效率不高,影响救援工作的顺利进行,给使用者带来不便,因此,针对以上现状,迫切需要开发一种水面救生无人机,以克服当前实际应用中的不足。
技术实现要素:
4.本实用新型的目的在于提供一种水面救生无人机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种水面救生无人机,所述水面救生无人机包括:
7.无人机机体;
8.飞行控制机构,所述飞行控制机构位于所述无人机机体上;以及
9.救生组件,所述救生组件与所述无人机机体相连接;
10.其中,救生组件包括有推进组件和控制组件,所述推进组件与所述控制组件相配合安装,所述推进组件用于将所述无人机机体上的落水人员在水面上通过控制组件进行定向推进移动。
11.与现有技术相比,本实用新型的有益效果是:
12.在救援工作中,通过设置的无人机机体和飞行控制机构,当飞行控制机构将无人机机体飞行移动并降落至落水人员的身旁时,通过设置的推进组件与控制组件配合工作,推进组件位于无人机机体的后部,并通过控制组件,可使落水者扒扶在无人机机体上,然后安全的被带回到岸边,通过设置的飞行控制机构和救生组件配合工作,即使在远离岸边的地方也可以起飞,从空中直接快速的飞到落水者身边,并通过水中推进组件将落水者带到岸边,在有大浪的时候,也可以在高于浪头的高度飞行到落水者附近进行救援,当有大量影响救援的漂浮物在落水者附近时,救生无人机也可以飞行过去,充当落水者的临时避难所,让人可以漂浮在水面等待进一步救援,通过利用无人机遥控技术,在空中快速飞行到落水者附近进行救援,然后再利用水中的推进器将落水者送到安全地域,节省了救援时间,提高了救援效率,改善了遥控救生圈在复杂水文情况下无法实施救援的许多不足,为使用者提供了便利,值得推广。
附图说明
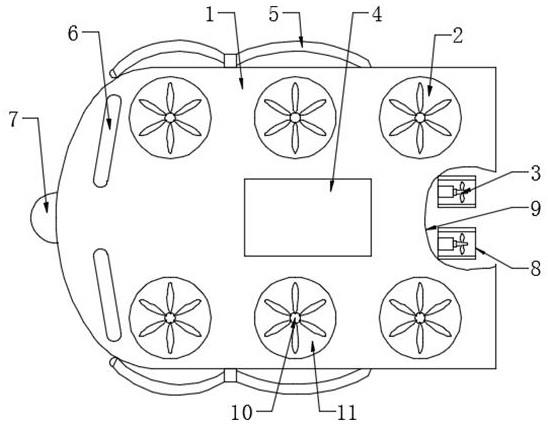
13.图1为本实用新型整体的俯视结构示意图。
14.图中:1
‑
无人机机体,2
‑
飞行控制机构,3
‑
推进器,4
‑
控制舱,5
‑
救生绳索,6
‑
把手,7
‑
摄像机,8
‑
防护壳,9
‑
安装槽,10
‑
旋翼,11
‑
防护罩。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.以下结合具体实施例对本实用新型的具体实现进行详细描述。
17.请参阅图1,本实用新型实施例提供的一种水面救生无人机,所述水面救生无人机包括:
18.无人机机体1;
19.飞行控制机构2,所述飞行控制机构2位于所述无人机机体1上;以及
20.救生组件,所述救生组件与所述无人机机体1相连接;
21.其中,救生组件包括有推进组件和控制组件,所述推进组件与所述控制组件相配合安装,所述推进组件用于将所述无人机机体1上的落水人员在水面上通过控制组件进行定向推进移动。
22.在救援工作中,通过设置的无人机机体1和飞行控制机构2,当飞行控制机构2将无人机机体1飞行移动并降落至落水人员的身旁时,通过设置的推进组件与控制组件配合工作,推进组件位于无人机机体1的后部,并通过控制组件,可使落水者扒扶在无人机机体1上,然后安全的被带回到岸边,通过设置的飞行控制机构2和救生组件配合工作,即使在远离岸边的地方也可以起飞,从空中直接快速的飞到落水者身边,并通过水中推进组件将落水者带到岸边,在有大浪的时候,也可以在高于浪头的高度飞行到落水者附近进行救援,当有大量影响救援的漂浮物在落水者附近时,救生无人机也可以飞行过去,充当落水者的临时避难所,让人可以漂浮在水面等待进一步救援,通过利用无人机遥控技术,在空中快速飞行到落水者附近进行救援,然后再利用水中的推进器将落水者送到安全地域,节省了救援时间,提高了救援效率,改善了遥控救生圈在复杂水文情况下无法实施救援的许多不足,为使用者提供了便利,值得推广。
23.在本实用新型的一个实施例中,请参阅图1,所述推进组件包括:
24.安装槽9,所述安装槽9开设于所述无人机机体1上;
25.至少一组防护壳8,所述防护壳8与所述安装槽9相连接;以及
26.推进器3,所述推进器3位于所述防护壳8内,且所述推进器3与所述控制组件相连接。
27.当无人机机体1经飞行控制机构2飞行移动到落水者的身旁时,落水者可趴在无人机机体1上,并通过设置的推进器3启动工作,推进器3可采用螺旋桨的形式,并与防护壳8配合工作,可避免水内的杂物与推进器3发生撞击的现象,从而导致推进器3损坏,通过推进器3与水的作用力,可推动无人机机体1向岸边移动或指定区域内等待救援。
28.在本实用新型的一个实施例中,请参阅图1,所述控制组件包括:
29.救生绳索5和把手6,所述救生绳索5和把手6均位于所述无人机机体1上;
30.控制舱4,所述控制舱4开设于所述无人机机体1上;以及
31.摄像机7,所述摄像机7分别与所述无人机机体1和控制舱4相连接。
32.当无人机机体1降落在落水者的身旁时,通过设置的救生绳索5,落水者可借助救生绳索5爬到无人机机体1的上表面上,并通过设置的控制舱4,其中,控制舱4为控制模块、电池、无线收发装置的所在地,可对推进器3和摄像机7的用电部件进行供电,当推进器3启动工作时,落水者可抓住无人机机体1上表面上设置的把手6,以避免再次滑落至水中,且通过设置的摄像机7,以便于操纵人员进行远程遥控救生。
33.在本实用新型的一个实施例中,请参阅图1,所述无人机机体1可采用气囊的形式,且所述无人机机体1的底部为平滑结构。
34.通过设置的无人机机体1,可以采用气囊的形式,也可以采用其他拥有一定浮力的材质,在此不做过多赘述,以便于使落水者躺在1 上进行救援工作,
35.在本实用新型的一个实施例中,请参阅图1,所述飞行控制机构2包括有旋翼10和防护罩11,且所述旋翼10和防护罩11的数量为若干个,所述防护罩11可采用金属材质。
36.通过设置的若干个旋翼10和防护罩11,且若干个旋翼10和防护罩11均匀分布安装在无人机机体1的两侧,以便于提供飞行所需的动力,并可提高飞行的稳定性。
37.需要说明的是,在本实用新型中,除非另有明确的规定和限定,术语“滑动”、“转动”、“固定”、“设有”等术语应做广义理解,例如,可以是焊接连接,也可以是螺栓连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
38.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。