1.本实用新型涉及航测无人机技术领域,具体为新型超轻碳钎维倾转固定翼航测无人机。
背景技术:
2.无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机与航空摄影测量相结合使得“无人机数字低空遥感”成为航空遥感领域的一个崭新发展方向,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景。
3.普通的航测无人机在降落时,多依靠无人机的控制系统来调节各个桨叶的转速和设置起落架吸收冲击力的方式,以达到平稳降落的目的,但普通的无人机的起落架多为固定结构,减震效果较差,且起飞后或者不使用时均无法收纳,不仅增大了无人机运行过程中的阻力,同时也不便于收纳,因此,针对上述问题提出新型超轻碳钎维倾转固定翼航测无人机。
技术实现要素:
4.本实用新型的目的在于提供新型超轻碳钎维倾转固定翼航测无人机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.新型超轻碳钎维倾转固定翼航测无人机,包括舱体和侧翼,所述舱体外侧中部固定连接有侧翼,所述侧翼中部固定连接有固定架,所述固定架上端固定连接有侧翼驱动组件,所述舱体上端中部设有舱门,所述舱体后端中部固定连接有尾翼,所述舱体前端中部固定连接有头部驱动组件。
7.优选的,所述舱体下端外侧转动连接有起落架,所述起落架内侧中部转动连接有转杆,所述转杆另一端转动连接有滑动件,所述滑动件上端中部固定连接有滑杆,所述滑杆外侧滑动连接有滑座,所述滑座外侧与舱体固定连接。
8.优选的,所述滑动件内部滑动连接有导向杆,所述导向杆外侧设有缓冲弹簧,所述缓冲弹簧一端与滑动件固定连接,所述缓冲弹簧另一端与滑座固定连接。
9.优选的,所述滑座上端固定连接有电动伸缩杆,所述电动伸缩杆端部固定连接有鱼眼连杆,所述鱼眼连杆外侧转动连接有卡爪,所述鱼眼连杆内部固定连接有扭转弹簧,所述扭转弹簧另一端与卡爪固定连接。
10.优选的,所述滑座内部开设有贯穿的十字槽,所述滑座上端内侧固定连接有挡轴。
11.优选的,所述舱体下端中部固定连接有测距雷达,所述舱体、侧翼、固定架、舱门和尾翼均为碳纤维材质构成。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型中,通过设置的舱体、侧翼、固定架、舱门和尾翼,舱体、侧翼、固定架、舱门和尾翼均为碳纤维材质构成,不仅可以减轻无人机的整体质量,增加续航里程,同时碳纤维材质的强度更高,使无人机整体稳定性更好;
14.2、本实用新型中,通过设置的起落架、滑动件、导向杆、缓冲弹簧和测距雷达,可以利用缓冲弹簧的收缩吸收无人机在降落时的冲击力,使无人机降落过程更加的平稳;
15.3、本实用新型中,通过设置的电动伸缩杆、卡爪、扭转弹簧和挡轴,可以在无人机起飞后,将起落架收纳进舱体的内部,减小无人机飞行时的阻力,便于无人机的运行,同时也便于无人机的收纳。
附图说明
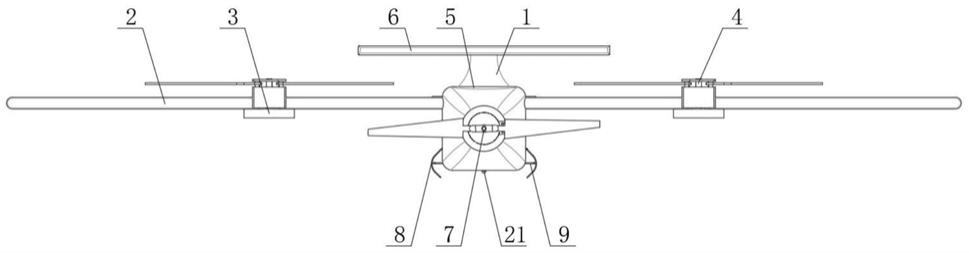
16.图1为本实用新型整体结构示意图;
17.图2为本实用新型的俯视图;
18.图3为本实用新型滑座的安装结构示意图;
19.图4为本实用新型图3的a处结构示意图;
20.图5为本实用新型滑座的安装结构立体图;
21.图6为本实用新型滑座的整体结构立体图;
22.图7为本实用新型卡爪的安装结构立体图;
23.图8为本实用新型导向杆的安装结构立体图。
24.图中:1
‑
舱体、2
‑
侧翼、3
‑
固定架、4
‑
侧翼驱动组件、5
‑
舱门、6
‑
尾翼、7
‑
头部驱动组件、8
‑
起落架、9
‑
转杆、10
‑
滑动件、11
‑
滑杆、12
‑
滑座、13
‑
导向杆、14
‑
缓冲弹簧、15
‑
电动伸缩杆、16
‑
鱼眼连杆、17
‑
卡爪、18
‑
扭转弹簧、19
‑
十字槽、20
‑
挡轴、21
‑
测距雷达。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1
‑
8,本实用新型提供一种技术方案:
27.新型超轻碳钎维倾转固定翼航测无人机,包括舱体1和侧翼2,舱体1外侧中部固定连接有侧翼2,侧翼2中部固定连接有固定架3,固定架3上端固定连接有侧翼驱动组件4,舱体1上端中部设有舱门5,舱体1后端中部固定连接有尾翼6,舱体1前端中部固定连接有头部驱动组件7。
28.舱体1下端外侧转动连接有起落架8,起落架8内侧中部转动连接有转杆9,转杆9另一端转动连接有滑动件10,滑动件10上端中部固定连接有滑杆11,滑杆11外侧滑动连接有滑座12,滑座12外侧与舱体1固定连接,滑动件10内部滑动连接有导向杆13,导向杆13外侧设有缓冲弹簧14,缓冲弹簧14一端与滑动件10固定连接,缓冲弹簧14另一端与滑座12固定
连接,滑座12上端固定连接有电动伸缩杆15,电动伸缩杆15端部固定连接有鱼眼连杆16,鱼眼连杆16外侧转动连接有卡爪17,鱼眼连杆16内部固定连接有扭转弹簧18,扭转弹簧18另一端与卡爪17固定连接,滑座12内部开设有贯穿的十字槽19,滑座12上端内侧固定连接有挡轴20,舱体1下端中部固定连接有测距雷达21,舱体1、侧翼2、固定架3、舱门5和尾翼6均为碳纤维材质构成。
29.工作流程:用电器均为内置电源供电,舱体1、侧翼2、固定架3、舱门5和尾翼6均为碳纤维材质构成,不仅可以减轻无人机的整体质量,增加续航里程,同时碳纤维材质的强度更高,使无人机整体稳定性更好,测距雷达21可以检测无人机距离地面的高度,并将高度信号实时传送至无人机的控制中心,在无人机降落过程中,测距雷达21测得距离信息后,当无人机接近地面时,控制中心接通电动伸缩杆15的电源,电动伸缩杆15运行推动卡爪17在滑座12的十字槽19中向外侧运动,当卡爪17的外侧端面与滑杆11相接触时,滑杆11阻碍了卡爪17的运动,使卡爪17围绕鱼眼连杆16的中心转动,使滑杆11滑动至卡爪17的内部,然后卡爪17带动滑杆11继续向外侧运动,滑杆11带动滑动件10沿导向杆13方向运动,滑动件10推动转杆9向外侧运动,转杆9向外侧运动将起落架8由关闭状态变为开启状态,电动伸缩杆15继续运动至卡爪17运动至挡轴20处时,挡轴20下压卡爪17,使滑杆11与卡爪17相脱离,此时无人机的起落架8与地面接触,下落时的冲击力作用在起落架8处,起落架8受力后向内侧收缩,从而可以推动滑动件10沿导向杆13向内侧收缩滑动,滑动件10压缩缓冲弹簧14,从而可以对冲击力进行缓冲,使无人机降落过程更加的平稳,当无人机起飞时,测距雷达21测得距离信息后,当无人机远离地面时,控制中心接通电动伸缩杆15的电源,电动伸缩杆15运行收缩复位,带动卡爪17在滑座12的十字槽19中向内侧运动,当卡爪17的内侧端面与滑杆11相接触时,滑杆11阻碍了卡爪17的运动,使卡爪17围绕鱼眼连杆16的中心进行反向转动,使滑杆11滑动至卡爪17的内部,随后卡爪17带动滑杆11复位,滑杆11带动滑动件10和转杆9复位,使起落架8收纳进舱体1的内部,可以减小无人机飞行时的阻力,便于无人机的运行。
30.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。