1.本实用新型具体涉及一种多旋翼无人机停靠充电通讯一体平台。
背景技术:
2.无人机(unmanned aerial vehicle,uav)是一种先进的无人驾驶自行飞行器。无人机输电巡线系统是一个复杂的集航空、输电、电力、气象、遥测遥感、通信、地理信息(gis)、图像识别、信息处理的一体系统,涉及飞行控制技术、机体稳定控制技术、数据链通讯技术、现代导航技术、机载遥测遥感技术、快速对焦摄像技术以及故障诊断等多个高尖技术领域。现代无人机具备高空、远距离、快速、自行作业的能力,可以穿越高山、河流对输电线路进行快速巡线,对架空线的铁塔、支架、导线、绝缘子、防震锤、耐张线夹、悬垂线夹等进行全光谱的快速摄像和故障监测,但是,在野外对一大片区域的探测,多旋翼无人机会面临续航不足,信号丢失等问题。
技术实现要素:
3.为解决现有技术中存在的问题,本实用新型提供了一种多旋翼无人机停靠充电通讯一体平台,具体的技术方案如下所述:
4.一种多旋翼无人机停靠充电通讯一体平台,其特征在于:包括有铝合金外壳、无人机承载装置外壳、网状雷达以及舱门,所述无人机承载装置外壳固定安装在铝合金外壳上方,所述网状雷达安装在铝合金外壳的侧面上,所述无人机承载装置外壳内设置有无人机承载装置和夹紧装置,所述无人机承载装置包括无人机夹紧平台,所述夹紧装置包括有电机、滑块、丝杠以及夹条,所述电机设置有两个,所述夹条和丝杠分别设置有四根,四根夹条和四根丝杠分别位于无人机夹紧平台的前后左右,所述夹条通过滑块安装在丝杠上,当多旋翼无人机降落在无人机夹紧平台上时,所述电机驱动夹条在丝杠上向内收缩滑动,实现对多旋翼无人机的固定,还包括有舱门滑轨,所述舱门滑轨安装在铝合金外壳的边框上,所述舱门包括有左舱门和右舱门,所述左舱门和右舱门分别位于无人机夹紧平台两侧且在舱门滑轨上滑动设置。
5.进一步地,还包括有垂直轴叶轮,所述垂直轴叶轮包括有垂直轴左叶轮和垂直轴右叶轮,垂直轴左叶轮和垂直轴右叶轮分别安装在左舱门和右舱门上方,所述垂直轴叶轮用于对无人机夹紧平台提供电力。
6.进一步地,还包括有太阳能板,所述太阳能板设置有两块,分别安装在左舱门和右舱门上方,所述太阳能板用于对无人机夹紧平台提供电力。
7.进一步地,所述铝合金外壳内还设置有受力横梁,所述受力横梁交错设置且固定连接在铝合金外壳的内壁上,所述无人机承载装置外壳安装在受力横梁上方且固定在铝合金外壳内壁上。
8.进一步地,所述电机包括有电机甲、电机乙,所述丝杠包括有左丝杠、右丝杠、上丝杠、下丝杠,所述夹条包括有上夹条、下夹条、右夹条、左夹条,所述滑块包括有右上滑块、右
下滑块、左上滑块、左下滑块、上右滑块、上左滑块、下左滑块、下右滑块,所述电机甲驱动上夹条和下夹条分别在左丝杠和右丝杠上前后滑动,所述电机乙驱动右夹条和左夹条分别在上丝杠和下丝杠上左右滑动。
9.进一步地,所述无人机承载装置外壳上方设置有条状通孔,所述上夹条、下夹条、右夹条以及左夹条,分别穿过条状通孔设置。
10.进一步地,还包括有支撑腿,所述支撑腿设置有四根,分别固定连接在铝合金外壳的下方。
11.本实用新型的有益效果为:
12.本实用新型通过按区域投放一定数量的该平台,该平台用于对多旋翼无人机自动停靠,以及附带有无线充电的平台无人机夹紧平台,还通过设置有自动夹紧装置来固定多旋翼无人机,防止野外发生地震山洪等对多旋翼无人机造成损伤;同时顶部铺有太阳能板通过太阳照射产生电能,以及垂直轴发电叶轮,在野外被风吹动从而通过风能产生电能,用于多旋翼无人机进行充电。
附图说明
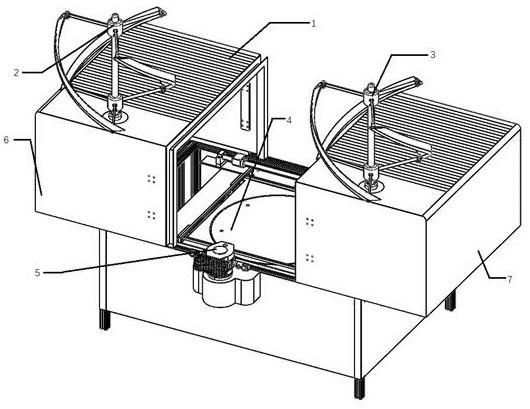
13.图1为本实用新型实施例中的一种多旋翼无人机停靠充电通讯一体平台的立体图;
14.图2为本实用新型实施例中的无人机承载装置的立体图;
15.图3为本实用新型实施例中的受力横梁的立体图;
16.图4为本实用新型实施例中的无人机承载装置外壳的立体图;
17.图5为本实用新型实施例中的夹紧装置的立体图。
18.其中,1、太阳能板;2、垂直轴左叶轮;3、垂直轴右叶轮;4、无人机承载装置;5、网状雷达;6、左舱门;7、右舱门;8、舱门滑轨;9、无人机夹紧平台;10、夹紧装置;11、铝合金外壳;12、受力横梁;13、无人机承载装置外壳;14、电机甲;15、电机乙;16、左丝杠;17、上丝杠;18、下丝杠;19、上夹条;20、下夹条;21、右夹条;22、左夹条;23、右上滑块;24、右下滑块;25、左上滑块;26、左下滑块;27、上右滑块;28、上左滑块;29、下左滑块;30、下右滑块;31、右丝杠。
具体实施方式:
19.为了加深对本实用新型的理解,下面结合附图对本实用新型的实施例做详细的说明。
20.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。
21.实施例
22.参见图1至图5,
23.一种多旋翼无人机停靠充电通讯一体平台,包括有铝合金外壳11、无人机承载装置外壳13、网状雷达5以及舱门,所述无人机承载装置外壳13固定安装在铝合金外壳11上
方,所述网状雷达5安装在铝合金外壳11的侧面上,所述无人机承载装置外壳13内设置有无人机承载装置4和夹紧装置10,所述无人机承载装置4包括无人机夹紧平台9,所述夹紧装置10包括有电机、滑块、丝杠以及夹条,所述电机设置有两个,所述夹条和丝杠分别设置有四根,四根夹条和四根丝杠分别位于无人机夹紧平台9的前后左右,所述夹条通过滑块安装在丝杠上,当多旋翼无人机降落在无人机夹紧平台9上时,所述电机驱动夹条在丝杠上向内收缩滑动,实现对多旋翼无人机的固定,还包括有舱门滑轨8,所述舱门滑轨8安装在铝合金外壳11的边框上,所述舱门包括有左舱门6和右舱门7,所述左舱门6和右舱门7分别位于无人机夹紧平台9两侧且在舱门滑轨8上滑动设置。
24.工作过程:
25.在野外对一大片区域进行探测时,多旋翼无人机会面临续航不足,信号丢失等技术问题。本实用新型通过按区域投放一定数量的该平台,实现对多旋翼无人机进行电力补充,指令接收以及返回待命等功能,保证了多旋翼无人机在野外大片区域搜索时的安全和准确性;
26.该平台用于对多旋翼无人机自动停靠以及附带有无线充电的无人机夹紧平台9,在无人机承载装置外壳13内同时有自动夹紧装置10来固定多旋翼无人机,防止野外发生地震山洪等对多旋翼无人机造成损伤;
27.同时顶部铺有太阳能板1通过太阳照射产生电能,以及垂直轴发电叶轮,在野外被风吹动从而通过风能产生电能,用于多旋翼无人机进行充电。
28.该平台还设置有通讯装置网状雷达5,较多数多旋翼无人机强大很多,在多旋翼无人机信号丢失后,设计程序让其自动归为到该平台内,当该平台检测到无人机的信息时,左舱门6和右舱门7便会沿着舱门滑轨8自动打开,让多旋翼无人机降落在无人机夹紧平台9上。
29.其中自动夹紧装置10的工作原理如下:当多旋翼无人机降落完成后,电机甲14和电机乙15便开始工作,这样右上滑块23,左上滑块25便在右丝杠31和左丝杠16的驱动下,向下开始运动,同时右下滑块24与左下滑块26也分别在右丝杠31与左丝杠16的驱动下向上运动,既此,上夹条19便可以向下夹紧,下夹条20便可以向上夹紧,这样就完成了对多旋翼无人机的上下位的固定,同理多旋翼无人机的左右位的固定也是如此。
30.在本实施例中:还包括有垂直轴叶轮,所述垂直轴叶轮包括有垂直轴左叶轮2和垂直轴右叶轮3,垂直轴左叶轮2和垂直轴右叶轮3分别安装在左舱门6和右舱门7上方,所述垂直轴叶轮用于对无人机夹紧平台9提供电力;还包括有太阳能板1,所述太阳能板1设置有两块,分别安装在左舱门6和右舱门7上方,所述太阳能板1用于对无人机夹紧平台9提供电力。
31.上述结构中:垂直轴左叶轮2和垂直轴右叶轮3分别安装在左舱门6和右舱门7上方,太阳能板1设置有两块,分别安装在左舱门6和右舱门7上方,分别通过风力发电和太阳能发电为无人机夹紧平台9提供电力,方便多旋翼无人机进行无线充电。
32.在本实施例中:所述铝合金外壳11内还设置有受力横梁12,所述受力横梁12交错设置且固定连接在铝合金外壳11的内壁上,所述无人机承载装置外壳13安装在受力横梁12上方且固定在铝合金外壳11内壁上。
33.上述结构中:受力横梁12用于对无人机承载装置外壳13进行支撑和固定,防止其掉落。
34.在本实施例中:所述电机包括有电机甲14、电机乙15,所述丝杠包括有左丝杠16、右丝杠31、上丝杠17、下丝杠18,所述夹条包括有上夹条19、下夹条20、右夹条21、左夹条22,所述滑块包括有右上滑块23、右下滑块24、左上滑块25、左下滑块26、上右滑块27、上左滑块28、下左滑块29、下右滑块30,所述电机甲14驱动上夹条19和下夹条20分别在左丝杠16和右丝杠31上前后滑动,所述电机乙15驱动右夹条21和左夹条22分别在上丝杠17和下丝杠18上左右滑动。
35.上述结构中:通过电机甲14驱动上夹条19和下夹条20分别在左丝杠16和右丝杠31上前后滑动,所述电机乙15驱动右夹条21和左夹条22分别在前丝杠和后丝杠上左右滑动,将降落在无人机夹紧平台9上的多旋翼无人机进行固定,防止其掉落。
36.在本实施例中:所述无人机承载装置外壳13上方设置有条状通孔,所述上夹条19、下夹条20、右夹条21以及左夹条22,分别穿过条状通孔设置。
37.上述结构中:无人机承载装置外壳13上方设置有条状通孔,上夹条19、下夹条20、右夹条21以及左夹条22分别在条状通孔中活动,实现对多旋翼无人机进行固定。
38.在本实施例中:还包括有支撑腿,所述支撑腿设置有四根,分别固定连接在铝合金外壳11的下方。
39.上述结构中:支撑腿用于对铝合金外壳11的固定,防止其在地面上产生晃动。
40.本实用新型方案所公开的技术手段不仅限于上述技术手段所公开的技术手段,还包括由以上技术特征等同替换所组成的技术方案。本实用新型的未尽事宜,属于本领域技术人员的公知常识。