1.本实用新型涉及机器人控制领域,尤其是一种机巢系统,可为无人机自动续航提供启停平台。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,或者由车载计算机完全地或间歇地自主地操作。
3.与有人驾驶的飞机相比,无人机往往更适合那些重复和危险的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机嵌入各行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等领域的应用,大大的拓展了无人机本身的用途。
4.但是无人机在运行过程中,对电能的损耗较快,极大降低无人机的续航力,尤其是无人机在工作完成后,需要人工收纳整理,降低了自动化程度;一则因为无人机对电池的挂载能力有限,二则由于无人机持续的高空飞行十分费电,通常运行半小时后就需要返航充电或更换电池,无论是更换电池还是为电池充电,大多需要人工参与,破坏了无人机整体智能性。
5.运营商提出通过机巢收纳停运的无人机,并为无人机充电;借助机巢自动延长无人机整体的续航能力,但是需要在机巢中设置机械手和辅助构件配合完成电池更换流程,具体为:先通过辅助构件将无人机推动至指定位置,然后通过机械手将缺电的电池取下放入充电盒内,然后通过机械手将已经充好的电池放入无人机的电池舱中;这种方式需要额外设置机械手及辅助构件,增加了系统的成本,而且占用空间,充电过程复杂,容易出错。
6.鉴于此,克服上述现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
7.本实用新型需要解决的技术问题是:现有的无人机缺乏配套的停靠平台,自动入库困难,尤其需要借助人力或第三方工具补充电源。
8.本实用新型通过如下技术方案达到上述目的。
9.本实用新型提供一种机巢系统,包括配套设置地设备舱、停机舱和无人机,所述设备舱内设置有控制器、通讯设备和电源系统;
10.所述控制器作为机巢系统的控制中枢,连接并监控通讯设备、电源系统和停机舱的运行工况,并借助通讯设备与无人机交互数据;所述电源系统为控制器、通讯设备和停机舱供电;其中通讯设备包括数字电台、图传电台、5g通信设备和/或微波通信设备;
11.所述停机舱设置于设备舱的顶部,可存放所述无人机;
12.所述电源系统包括配套设置地充电接口、电源转换器和输电接口,所述充电接口设置于设备舱的侧壁或底部,可将市电引入电源转换器;所述输电接口分为自用接口和外
充接口,其中外充接口设置于停机舱内,可将电源转换器的输出电源转发给无人机,为无人机充电;其中自用接口设置于设备舱,为设备舱内用电设备供电。
13.进一步的,所述停机舱由挡板和盖板合围而成,包括配套设置的底部挡板、左侧挡板、右侧挡板、前侧挡板、后侧挡板、左侧盖板和右侧盖板;
14.所述底部挡板水平贴置于设备舱的顶部,可支撑无人机的重量;
15.所述左侧挡板的前端可旋转地设置于底部挡板的左侧,后端垂直设置一块左侧盖板;
16.所述右侧挡板的前端可旋转地设置于底部挡板的右侧,后端垂直设置一块右侧盖板;
17.所述前侧挡板的一端可旋转地设置于底部挡板的前侧;
18.所述后侧挡板的一端可旋转地设置于底部挡板的后侧。
19.进一步的,所述设备舱中还设置有与控制器相连的挡板驱动系统,所述输电接口中自用接口给挡板驱动系统供电;
20.所述挡板驱动系统的输出端分别与左侧挡板、右侧挡板、前侧挡板和后侧挡板相连,可改变左侧挡板、右侧挡板、前侧挡板和后侧挡板的旋转角度;
21.具体的,当挡板驱动系统推动左侧挡板、右侧挡板、前侧挡板和后侧挡板全部旋转至与底部挡板平行时,停机舱伸展为水平停机场,便于无人机降落或起飞;当挡板驱动系统推动左侧挡板、右侧挡板、前侧挡板和后侧挡板全部旋转至与底部挡板垂直时,左侧盖板和右侧盖板对接成一块顶部盖板,顶部盖板的长宽尺寸与底部挡板相对应,此时停机舱合拢为空心盒体,可将无人机包裹在空心盒体内,为无人机挡风、遮雨和防晒。
22.进一步的,所述挡板驱动系统采用液压驱动原理,包括液压油箱、导油管、液压泵、液压阀组和液压缸;
23.所述控制器连接并监控液压泵和液压阀组的运行工况,所述输电接口中自用接口给液压泵和液压阀组供电;
24.所述液压油箱设置于设备舱中,所述液压泵设置于液压油箱的顶部;
25.所述液压泵的入口端通过导油管与液压油箱联通,液压泵的出口端通过导油管与液压阀组的入口端联通,所述液压阀组的出口端通过导油管与液压缸联通;液压泵可将液压油箱中的液压油经由液压阀组注入液压缸中,也可以将液压缸中的液压油经由液压阀组返回液压油箱中;
26.所述液压阀组设置有四个电磁阀,每个电磁阀通过导油管接通一个液压缸;
27.具体的,所述设备舱的外侧壁四周分别各设置一个支撑台;所述左侧挡板、右侧挡板、前侧挡板和后侧挡板的底端面设置有挂耳;
28.每个支撑台上对应设置一个可旋转地液压缸,所述液压缸的输出顶端可旋转地铰接在对应挂耳上,其中左侧挡板、右侧挡板、前侧挡板或后侧挡板各对应一个与其距离最近的支撑台,当液压泵和液压阀组配合动作时,可改变液压缸的伸展长度,进而改变左侧挡板、右侧挡板、前侧挡板或后侧挡板的旋转角度;具体为当电磁阀打开并且液压泵给液压缸注入液压油时,对应的液压缸进行伸展动作,可将左侧挡板、右侧挡板、前侧挡板或后侧挡板向上顶起;当电磁阀打开并且液压泵将液压缸中液压油返回时,对应的液压缸进行收缩动作,可将左侧挡板、右侧挡板、前侧挡板或后侧挡板向下放倒;当电磁阀关闭时,对应的液
压缸的长度自保持,可维持左侧挡板、右侧挡板、前侧挡板或后侧挡板的旋转角度。
29.进一步的,所述左侧挡板和右侧挡板的左右两侧分别铰接有拓展板;在所述拓展板与左侧挡板或右侧挡板的铰接相连处设置有定向弹簧,可约束拓展板的动作范围;具体的,当左侧挡板或右侧挡板旋转至与底部挡板水平时,对应的拓展板在重力作用下旋转至与左侧挡板或右侧挡板平行,在左侧挡板或右侧挡板从与底部挡板水平旋转至与底部挡板垂直过程中,对应的拓展板在定向弹簧作用下会旋转动作,前侧挡板和后侧挡板下端面设置有限位凸台,可限制拓展板旋转的角度,防止拓展板之间对撞。
30.进一步的,所述输电接口中外充接口设置有配套的正接口和负接口;具体的,所述正接口为正方形或长方形薄片导电接口,覆盖于底部挡板的上表面或覆盖于顶部盖板的下表面,对应的,所述负接口为正方形或长方形薄片导电接口,覆盖于顶部盖板的下表面或覆盖于底部挡板的上表面,即当所述正接口覆盖于底部挡板的上表面时,所述负接口覆盖于顶部盖板的下表面,当所述正接口覆盖于顶部盖板的下表面时,所述负接口覆盖于底部挡板的上表面。
31.进一步的,所述停机舱还设置有监视设备;所述监视设备可监视无人机的运行工况,所述控制器连接并监控所述监视设备的运行工况,所述输电接口中外充接口给监视设备供电;
32.具体的,所述监视设备包括摄像头、位置传感器和/或压力传感器,所述无人机顶部设置有闪烁灯,所述摄像头安装于左侧挡板、右侧挡板、前侧挡板或后侧挡板的上端面的侧边,其中摄像头具备夜视和转动功能,可实时观察无人机的位置信息,还能配合控制器判断无人机的运行状态,所述位置传感器可感应无人机进入停机舱的位置,安装于底部挡板、左侧挡板、右侧挡板、前侧挡板和后侧挡板的顶角处,具体可探测无人机进入底部挡板、左侧挡板及其拓展板、右侧挡板及其拓展板、前侧挡板和后侧挡板的位置;所述压力传感器安装于底部挡板、左侧挡板及其拓展板、右侧挡板及其拓展板、前侧挡板和后侧挡板的上端面,可探测无人机对底部挡板、左侧挡板及其拓展板、右侧挡板及其拓展板、前侧挡板和后侧挡板的上端面的压力,从而获取无人机的位置信息。
33.进一步的,所述停机舱的外充接口中还包括无线充电输送端,所述无人机上设置有对应的无线充电接收端,当无人机停降在停机舱中时,停机舱可通过无线充电模式为无人机充电。
34.进一步的,所述无人机的顶部设置有充电探头,与无人机中电源部件一极相连,所述无人机的底部设置有充电探圈,与无人机中电源部件另一极相连;所述充电探头和充电探圈配合工作可将外部电源引入无人机,为无人机中电源部件充电;
35.具体的,其中充电探头设置为无人机最顶部的设备,材质为可导电的金属体,其头部可设置弹簧缓冲端,便于挤压时自动改变长度,当无人机停放在停机舱且顶部盖板旋转至充电探头的顶部时,顶部盖板上的外充接口可牢固压住充电探头,充电探头的极性与顶部盖板上的外充接口的级性相对应;
36.其中充电探圈设置为无人机最底部的设备,材质为可导电的金属体,当无人机停放在停机舱中时,在无人机重力作用下,充电探圈可牢固压住底部挡板上的外充接口,充电探圈的极性与底部挡板上的外充接口的级性相对应;
37.所述停机舱、正接口和负接口的安装尺寸要求为:当顶部盖板盖合至与底部盖板
平行时,可与无人机的充电探头牢固接触,便于停机舱自动给无人机充电。
38.除此之外,所述挡板驱动系统也可采用电动驱动原理实现,包括驱动电机和涡轮伸缩杆,控制器连接并监控驱动电机的运行工况,所述输电接口中的自用接口给驱动电机供电;
39.具体的,所述设备舱的外侧壁四周分别各设置一个支撑台;所述左侧挡板、右侧挡板、前侧挡板和后侧挡板的底端面设置有挂槽;
40.每个支撑台上对应设置一个驱动电机,所述涡轮伸缩杆的一端与驱动电机的输出端啮合相连,另一端可梭动地插在对应挂槽中,其中左侧挡板、右侧挡板、前侧挡板或后侧挡板各对应一个与其距离最近的支撑台;当驱动电机动作时,可改变涡轮伸缩杆的伸展长度,进而改变左侧挡板、右侧挡板、前侧挡板或后侧挡板的旋转角度。
41.进一步的,所述机巢系统的运行方法包括以下步骤。
42.步骤一:初始状态,所述无人机停放于停机舱中,控制器通过通讯设备接收监控中心或用户终端指令;
43.步骤二:领取任务,当机巢系统接收到“起飞巡航”指令时,控制器解析“起飞巡航”的指令内容,并给挡板驱动系统下发“打开停机舱”的动作指令;
44.步骤三:展开停机舱,所述挡板驱动系统采用液压驱动原理时,所述挡板驱动系统先驱动左侧挡板和右侧挡板对应的液压阀组动作,对应的液压缸向下拉动左侧挡板和右侧挡板,使左侧挡板和右侧挡板从与底部挡板垂直状态旋转至与底部挡板平行的状态,在左侧挡板和右侧挡板向下旋转的过程中,对应的拓展板在自身重力作用下,同样会水平展开;然后驱动前侧挡板和后侧挡板对应的液压阀组动作,对应的液压缸向下拉动前侧挡板和后侧挡板,使前侧挡板和后侧挡板从与底部挡板垂直状态旋转至与底部挡板平行的状态,挡板驱动系统给控制器反馈“停机舱已打开”的信息;此时停机舱完全展开,便于无人机起飞;
45.步骤四:出库巡航,控制器给无人机下发飞行路线信息,包括飞行范围、停留时间和动作要求,并给出“允许起飞”的指令,无人机根据控制器指令启动待机,然后根据飞行路线信息完成飞行巡航任务;
46.步骤五:返航入库,当无人机飞行任务完成或者电量不足时,无人机向停机舱的位置自动返航,并向控制器发送“返航归巢”的请求,飞至停机舱正上方,悬停修正位置,然后缓慢降落至停机舱上;
47.步骤六:确定停机状态,监视设备查看无人机当前状态并告知控制器,当无人机的充电探圈全部停降在停机舱的底部挡板上时,为“最佳降落状态”;
48.当无人机的充电探圈只有一部分停降在停机舱的底部挡板上时,为“合格降落状态”;
49.当无人机的充电探圈处于底部挡板之外但是处于停机舱边界范围之内时,为“临界降落状态”;
50.当无人机的充电探圈处于停机舱边界范围之外时,为“失败降落状态”;
51.步骤七:调整停机位置,如果无人机处于“失败降落状态”,则控制器下发指令要求无人机重新降落,无人机起飞后以“最佳降落状态”为目标,根据位置偏差量适当调整悬停位置然后重新降落,反复调整直至无人机摆脱“失败降落状态”;
52.如果无人机处于“临界降落状态”,则控制器下发指令要求无人机以“最佳降落状
态”为目标,重新起飞并降落使无人机处于“最佳降落状态”或“合格降落状态”,如果反复调整2
‑
5次后无人机还是处于“临界降落状态”,则进入下一步;
53.步骤八:合拢停机舱,如果无人机处于“临界降落状态”或“合格降落状态”,控制器给挡板驱动系统下发“关闭停机舱”的动作指令;首先左侧挡板和右侧挡板对应的液压阀组动作,对应的液压缸向上顶起左侧挡板和右侧挡板顶起60
‑
75度,使无人机完全滑向前侧挡板、底部挡板或后侧挡板,然后将左侧挡板和右侧挡板恢复至与底部挡板平行状态;然后前侧挡板和后侧挡板对应的液压阀组动作,对应的液压缸向上顶起前侧挡板和后侧挡板,每次向上顶起5
‑
10度,然后左侧挡板和右侧挡板对应的液压阀组动作,对应的液压缸向上顶起左侧挡板和右侧挡板,每次向上顶起5
‑
10度,如此交替动作直至全部完成90度的旋转;在顶起的过程中,无人机从前侧挡板、后侧挡板、左侧挡板及其拓展板、右侧挡板及其拓展板上,滑向底部挡板上;
54.如果无人机处于“最佳降落状态”,监视设备给出无人机当前位置信息,控制器给挡板驱动系统下发“关闭停机舱”的动作指令;首先前侧挡板和后侧挡板对应的液压阀组动作,对应的液压缸向上顶起前侧挡板和后侧挡板,每次向上顶起30度,然后左侧挡板和右侧挡板对应的液压阀组动作,对应的液压缸向上顶起左侧挡板和右侧挡板,每次向上顶起30度,如此交替动作直至完成90度的旋转;
55.当前侧挡板和后侧挡板从与底部挡板水平状态旋转至与底部挡板垂直的状态,且左侧挡板和右侧挡板从与底部挡板水平状态旋转至与底部挡板垂直的状态时,左侧盖板和右侧盖板对接成一块顶部盖板,顶部盖板上的外充接口压住充电探头,此时充电探圈牢固压住底部挡板上的外充接口上;在左侧挡板和右侧挡板向上旋转过程中,对应的拓展板在定向弹簧的作用下向上旋转,并停靠在限位凸台上;
56.步骤九:实时充电,控制器驱动电源系统给无人机充电,无人机向控制器反馈充电效果,当充电探头或充电探圈充电失败时,控制器开启停机舱中无线充电输送设备为无人机充电,当无人机充电量大于90%即可接受新的“起飞巡航”命令。
57.本实用新型相比现有技术具有以下优点。
58.1、通过自动展开的停机舱为无人机提供更大尺寸的停机平台,提高无人机入库的成功率;尤其是前侧挡板、后侧挡板、左侧挡板及其拓展板、右侧挡板及其拓展板在向上抬起过程中可使无人机滑向底部挡板,降低了无人机入库难度。
59.2、通过底部挡板和顶部盖板夹住无人机并自动给无人机充电,只要无人机飞入停机舱,就能实现充电,无需额外设置机械手;优先采用有线模式充电,无线充电模式备用。
附图说明
60.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
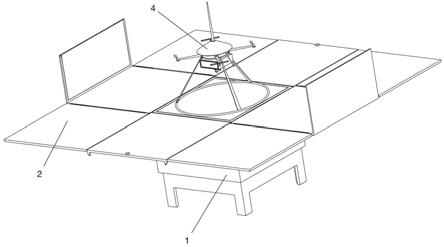
61.图1为实施例1中机巢系统的停机舱展开时对应俯视立体图。
62.图2为实施例1中机巢系统的控制设备组成结构图。
63.图3为实施例1中机巢系统的停机舱展开时对应仰视立体图。
64.图4为实施例1中机巢系统的前侧挡板和后侧挡板与底部挡板垂直状态时对应立体图。
65.图5为实施例1中机巢系统的停机舱完全合拢时对应立体图。
66.图6为实施例1中挡板驱动系统孤立时立体图。
67.图7为实施例1中机巢系统的设备舱掀开时部分设备立体图。
68.图8为实施例1中机巢系统的前侧挡板和后侧挡板的立体图。
69.图9为实施例1中机巢系统的左侧挡板和右侧挡板的立体图。
70.图10为实施例1中机巢系统的拓展板的立体图。
71.图11为实施例1中机巢系统的无人机孤立时立体图。
72.图12为实施例1中机巢系统的无人机充电时俯视立体图。
73.图13为实施例1中机巢系统的无人机充电时仰视立体图。
74.图14为实施例2中机巢系统的运行方法的流程图。
75.图中:1
‑
设备舱;2
‑
停机舱;3
‑
挡板驱动系统;4
‑
无人机;5
‑
监视设备;101
‑
控制器;102
‑
通讯设备;103
‑
电源系统;104
‑
充电接口;105
‑
电源转换器;106
‑
输电接口;107
‑
自用接口;108
‑
外充接口;109
‑
支撑台;110
‑
正接口;111
‑
负接口;201
‑
底部挡板;202
‑
左侧挡板;203
‑
右侧挡板;204
‑
前侧挡板;205
‑
后侧挡板;206
‑
左侧盖板;207
‑
右侧盖板;208
‑
挂耳;209
‑
拓展板;210
‑
定向弹簧;211
‑
限位凸台;301
‑
液压油箱;302
‑
导油管;303
‑
液压泵;304
‑
液压阀组;305
‑
液压缸;306
‑
电磁阀;401
‑
充电探头;402
‑
充电探圈;501
‑
摄像头;502
‑
位置传感器;503
‑
压力传感器。
具体实施方式
76.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
77.在本实用新型的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不应当理解为对本实用新型的限制。
78.此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面就参考附图和实施例结合来详细说明本实用新型。
79.实施例1:如图1
‑
13所示,本实用新型实施例提供一种机巢系统,包括配套设置地设备舱1、停机舱2和无人机4,所述设备舱1内设置有控制器101、通讯设备102和电源系统103;
80.所述控制器101为设置有stm32f系列cpu的工控机,作为机巢系统的控制中枢,连接并监控通讯设备102、电源系统103和停机舱2的运行工况,并借助通讯设备102与无人机4交互数据;所述电源系统103为控制器101、通讯设备102和停机舱2供电;其中通讯设备102包括数字电台、图传电台、5g通信设备和/或微波通信设备;
81.所述停机舱2设置于设备舱1的顶部,可存放所述无人机4;其中设备舱1顶部尺寸和停机舱2的底部尺寸一致,都是边长为1m的正方形,设备舱1高度为1m,设备舱1可设置于
水平地面上,也可以埋入90cm的土坑中,即将顶部适当露出地面即可;停机舱2的尺寸应与存放的无人机4尺寸相对应,即停机舱2的底部尺寸大于无人机4的底部尺寸,便于无人机4入库存放,停机舱2的高度与无人机4的高度相对应,便于将无人机4上下夹住,本实施例中停机舱2高度为80cm;
82.所述电源系统103包括配套设置地充电接口104、电源转换器105和输电接口106,所述充电接口104设置于设备舱1的底部,可将市电引入电源转换器105;所述输电接口106分为自用接口107和外充接口108,其中外充接口108设置于停机舱2内,可将电源转换器105的输出电源转发给无人机4,为无人机4充电,包括12v直流电;其中自用接口107设置于设备舱1,为设备舱1内用电设备供电,包括220v的交流电和12v、24v的直流电。
83.本实施例中,所述停机舱2由挡板和盖板合围而成,包括配套设置的底部挡板201、左侧挡板202、右侧挡板203、前侧挡板204、后侧挡板205、左侧盖板206和右侧盖板207;其中底部挡板201长1m、宽1m、厚5mm,材质为碳纤维;左侧挡板202、右侧挡板203、前侧挡板204、后侧挡板205的尺寸相同,都是长1m、高80cm、厚5mm,材质为碳纤维;左侧盖板206和右侧盖板207尺寸相同,都是长1m、高50cm、厚5mm,材质为碳纤维;
84.所述底部挡板201水平贴置于设备舱1的顶部,可支撑无人机4的重量;
85.所述左侧挡板202的前端可旋转地设置于底部挡板201的左侧,后端垂直设置一块左侧盖板206;
86.所述右侧挡板203的前端可旋转地设置于底部挡板201的右侧,后端垂直设置一块右侧盖板207;
87.所述前侧挡板204的一端可旋转地设置于底部挡板201的前侧;
88.所述后侧挡板205的一端可旋转地设置于底部挡板201的后侧。
89.本实施例中,所述设备舱1中还设置有与控制器101相连的挡板驱动系统3,所述输电接口106中自用接口107给挡板驱动系统3供电;
90.所述挡板驱动系统3的输出端分别与左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205相连,可改变左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205的旋转角度;
91.具体的,当挡板驱动系统3推动左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205全部旋转至与底部挡板201平行时,停机舱2伸展为水平停机场,便于无人机4降落或起飞;当挡板驱动系统3推动左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205全部旋转至与底部挡板201垂直时,左侧盖板206和右侧盖板207对接成一块顶部盖板,顶部盖板的长宽尺寸与底部挡板201相对应,此时停机舱2合拢为空心盒体,为长1m、宽1、高80cm的空心长方体,可将无人机4包裹在空心盒体内,为无人机4挡风、遮雨和防晒。
92.本实施例中,所述挡板驱动系统3采用液压驱动原理,包括液压油箱301、导油管302、液压泵303、液压阀组304和液压缸305;
93.所述控制器101连接并监控液压泵303和液压阀组304的运行工况,所述输电接口106中自用接口107给液压泵303和液压阀组304供电;
94.所述液压油箱301设置于设备舱1中,所述液压泵303设置于液压油箱301的顶部;
95.所述液压泵303的入口端通过导油管302与液压油箱301联通,液压泵303的出口端通过导油管302与液压阀组304的入口端联通,所述液压阀组304的出口端通过导油管302与
液压缸305联通;液压泵303可将液压油箱301中的液压油经由液压阀组304注入液压缸305中,也可以将液压缸305中的液压油经由液压阀组304返回液压油箱301中;
96.所述液压阀组304设置有四个电磁阀306,每个电磁阀306通过导油管302接通一个液压缸305;
97.具体的,所述设备舱1的外侧壁四周分别各设置一个支撑台109;所述左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205的底端面设置有挂耳208;
98.每个支撑台109上对应设置一个可旋转地液压缸305,所述液压缸305的输出顶端可旋转地铰接在对应挂耳208上,其中左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205各对应一个与其距离最近的支撑台109,当液压泵303和液压阀组304配合动作时,可改变液压缸305的伸展长度,进而改变左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205的旋转角度;具体为当电磁阀306打开并且液压泵303给液压缸305注入液压油时,对应的液压缸305进行伸展动作,可将左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205向上顶起;当电磁阀306打开并且液压泵303将液压缸305中液压油返回时,对应的液压缸305进行收缩动作,可将左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205向下放倒;当电磁阀306关闭时,对应的液压缸305的长度自保持,可维持左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205的旋转角度。
99.本实施例中,所述左侧挡板202和右侧挡板203的左右两侧分别铰接有拓展板209;在所述拓展板209与左侧挡板202或右侧挡板203的铰接相连处设置有定向弹簧210,可约束拓展板209的动作范围,定义最小角度0度表示拓展板209完全展开并与对应的左侧挡板202或右侧挡板203平行,最大角度为90度,表示拓展板209与对应的左侧挡板202或右侧挡板203垂直,定向弹簧210直径1cm;具体的,当左侧挡板202或右侧挡板203旋转至与底部挡板201水平时,对应的拓展板209在重力作用下旋转至与左侧挡板202或右侧挡板203平行,在左侧挡板202或右侧挡板203从与底部挡板201水平旋转至与底部挡板201垂直过程中,对应的拓展板209在定向弹簧210作用下会旋转动作,前侧挡板204和后侧挡板205下端面设置有限位凸台211,可限制拓展板209旋转的角度,本实例中限制角度为30度,可防止左侧挡板202或右侧挡板203上对应的拓展板209的前端对撞在一起。
100.本实施例中,所述输电接口106中外充接口108设置有配套的正接口110和负接口111;具体的,所述正接口110为正方形薄片导电接口,覆盖于底部挡板201的上表面,对应的,所述负接口111为正方形薄片导电接口,覆盖于顶部盖板的下表面。
101.本实施例中,所述停机舱2还设置有监视设备5;所述监视设备5可监视无人机4的运行工况,所述控制器101连接并监控所述监视设备5的运行工况,所述输电接口106中外充接口108给监视设备5供电;
102.具体的,所述监视设备5包括摄像头501、位置传感器502和压力传感器503,所述无人机4顶部设置有闪烁灯,所述摄像头501安装于左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205的上端面的侧边,其中摄像头501具备夜视和转动功能,可实时观察无人机4的位置信息,还能配合控制器101判断无人机4的运行状态,本实施例中,定义为:当闪烁灯持续红色亮起时代表无人机4处于飞行状态,当闪烁灯红绿色交互闪烁时代表无人机4已经停稳但处于上电待机旋转中,当闪烁灯持续绿色亮起时代表无人机4停稳并停机,当闪烁灯处于绿色闪烁时代表无人机4在正常充电,摄像头501安装时尽量靠边安装,既能友好观察,
又不影响无人机4充电;所述位置传感器502可感应无人机4进入停机舱2的位置,安装于底部挡板201、左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205的顶角处,具体可探测无人机4进入底部挡板201、左侧挡板202及其拓展板209、右侧挡板203及其拓展板209、前侧挡板204和后侧挡板205的位置;所述压力传感器503安装于底部挡板201、左侧挡板202及其拓展板209、右侧挡板203及其拓展板209、前侧挡板204和后侧挡板205的上端面,可探测无人机4对底部挡板201、左侧挡板202及其拓展板209、右侧挡板203及其拓展板209、前侧挡板204和后侧挡板205的上端面的压力,从而获取无人机4的位置信息。
103.本实施例中,所述停机舱2的外充接口108中还包括无线充电输送端,所述无人机4上设置有对应的无线充电接收端,当无人机4停降在停机舱2中时,停机舱2可通过无线充电模式为无人机4充电。
104.本实施例中,所述无人机4的顶部设置有充电探头401,与无人机4中电源部件负极相连,所述无人机4的底部设置有充电探圈402,与无人机4中电源部件正极相连;所述充电探头401和充电探圈402配合工作可将外部电源引入无人机4,为无人机4中电源部件充电;
105.具体的,其中充电探头401设置为无人机4最顶部的设备,高度40cm,材质为可导电的金属体,其头部可设置弹簧缓冲端,便于挤压时缩短长度,当无人机4停放在停机舱2且顶部盖板旋转至充电探头401的顶部时,顶部盖板上的外充接口108可牢固压住充电探头401,充电探头401的极性与顶部盖板上的外充接口108的级性相对应;
106.其中充电探圈402设置为无人机4最底部的设备,高度20cm,材质为可导电的金属体,当无人机4停放在停机舱2中时,在无人机4重力作用下,充电探圈402可牢固压住底部挡板201上的外充接口108,充电探圈402的极性与底部挡板201上的外充接口108的级性相对应;
107.所述停机舱2、正接口110和负接口111的安装尺寸要求为:当顶部盖板盖合至与底部盖板平行时,可与无人机4的充电探头401牢固接触,便于停机舱2自动给无人机4充电。
108.除此之外,所述挡板驱动系统3也可采用电动驱动原理实现,包括驱动电机和涡轮伸缩杆,控制器101连接并监控驱动电机的运行工况,所述输电接口106中的自用接口107给驱动电机供电;
109.具体的,所述设备舱1的外侧壁四周分别各设置一个支撑台109;所述左侧挡板202、右侧挡板203、前侧挡板204和后侧挡板205的底端面设置有挂槽;
110.每个支撑台109上对应设置一个驱动电机,所述涡轮伸缩杆的一端与驱动电机的输出端啮合相连,另一端可梭动地插在对应挂槽中,其中左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205各对应一个与其距离最近的支撑台109;当驱动电机动作时,可改变涡轮伸缩杆的伸展长度,进而改变左侧挡板202、右侧挡板203、前侧挡板204或后侧挡板205的旋转角度。
111.实施例2:如图14所示,所述机巢系统的运行方法包括以下步骤。
112.步骤一:初始状态,所述无人机4停放于停机舱2中,控制器101通过通讯设备102接收监控中心或用户终端指令;
113.步骤二:领取任务,当机巢系统接收到“起飞巡航”指令时,控制器101解析“起飞巡航”的指令内容,并给挡板驱动系统3下发“打开停机舱2”的动作指令;
114.步骤三:展开停机舱2,所述挡板驱动系统3采用液压驱动原理时,所述挡板驱动系
统3先驱动左侧挡板202和右侧挡板203对应的液压阀组304动作,对应的液压缸305向下拉动左侧挡板202和右侧挡板203,使左侧挡板202和右侧挡板203从与底部挡板201垂直状态旋转至与底部挡板201平行的状态,在左侧挡板202和右侧挡板203向下旋转的过程中,对应的拓展板209在自身重力作用下,同样会水平展开;然后驱动前侧挡板204和后侧挡板205对应的液压阀组304动作,对应的液压缸305向下拉动前侧挡板204和后侧挡板205,使前侧挡板204和后侧挡板205从与底部挡板201垂直状态旋转至与底部挡板201平行的状态,挡板驱动系统3给控制器101反馈“停机舱2已打开”的信息;此时停机舱2完全展开,便于无人机4起飞;
115.步骤四:出库巡航,控制器101给无人机4下发飞行路线信息,包括飞行范围、停留时间和动作要求,并给出“允许起飞”的指令,无人机4根据控制器101指令启动待机,然后根据飞行路线信息完成飞行巡航任务;
116.步骤五:返航入库,当无人机4飞行任务完成或者电量不足20%时,无人机4向停机舱2的位置自动返航,并向控制器101发送“返航归巢”的请求,飞至停机舱2正上方5m高时,悬停2
‑
4秒修正位置,然后缓慢降落至停机舱2上;
117.步骤六:确定停机状态,监视设备5查看无人机4当前状态并告知控制器101,当无人机4的充电探圈402全部停降在停机舱2的底部挡板201上时,为“最佳降落状态”;
118.当无人机4的充电探圈402只有一部分停降在停机舱2的底部挡板201上时,为“合格降落状态”;
119.当无人机4的充电探圈402处于底部挡板201之外但是处于停机舱2边界范围之内时,为“临界降落状态”;
120.当无人机4的充电探圈402处于停机舱2边界范围之外时,为“失败降落状态”;
121.步骤七:调整停机位置,如果无人机4处于“失败降落状态”,则控制器101下发指令要求无人机4重新降落,无人机4起飞后以“最佳降落状态”为目标,根据位置偏差量适当调整悬停位置然后重新降落,反复调整直至无人机4摆脱“失败降落状态”;
122.如果无人机4处于“临界降落状态”,则控制器101下发指令要求无人机4以“最佳降落状态”为目标,重新起飞并降落使无人机4处于“最佳降落状态”或“合格降落状态”,如果反复调整2
‑
5次后无人机4还是处于“临界降落状态”,则进入下一步;
123.步骤八:合拢停机舱2,如果无人机4处于“临界降落状态”或“合格降落状态”,控制器101给挡板驱动系统3下发“关闭停机舱2”的动作指令;首先左侧挡板202和右侧挡板203对应的液压阀组304动作,对应的液压缸305向上顶起左侧挡板202和右侧挡板203顶起75度,使无人机4完全滑向前侧挡板204、底部挡板201或后侧挡板205,然后将左侧挡板202和右侧挡板203恢复至与底部挡板201平行状态;然后前侧挡板204和后侧挡板205对应的液压阀组304动作,对应的液压缸305向上顶起前侧挡板204和后侧挡板205,每次向上顶起10度,然后左侧挡板202和右侧挡板203对应的液压阀组304动作,对应的液压缸305向上顶起左侧挡板202和右侧挡板203,每次向上顶起10度,如此交替动作直至全部完成90度的旋转;在顶起的过程中,无人机4从前侧挡板204、后侧挡板205、左侧挡板202及其拓展板209、右侧挡板203及其拓展板209上,滑向底部挡板201上;
124.如果无人机4处于“最佳降落状态”,监视设备5给出无人机4当前位置信息,控制器101给挡板驱动系统3下发“关闭停机舱2”的动作指令;首先前侧挡板204和后侧挡板205对
应的液压阀组304动作,对应的液压缸305向上顶起前侧挡板204和后侧挡板205,每次向上顶起30度,然后左侧挡板202和右侧挡板203对应的液压阀组304动作,对应的液压缸305向上顶起左侧挡板202和右侧挡板203,每次向上顶起30度,如此交替动作直至完成90度的旋转;
125.当前侧挡板204和后侧挡板205从与底部挡板201水平状态旋转至与底部挡板201垂直的状态,且左侧挡板202和右侧挡板203从与底部挡板201水平状态旋转至与底部挡板201垂直的状态时,左侧盖板206和右侧盖板207对接成一块顶部盖板,顶部盖板上的外充接口108压住充电探头401,此时充电探圈402牢固压住底部挡板201上的外充接口108上;在左侧挡板202和右侧挡板203向上旋转过程中,对应的拓展板209在定向弹簧210的作用下向上旋转,并停靠在限位凸台211上;
126.步骤九:实时充电,控制器101驱动电源系统103给无人机4充电,无人机4向控制器101反馈充电效果,当充电探头401或充电探圈402接触不良导致充电失败时,控制器101开启停机舱2中无线充电输送设备为无人机4充电,当无人机4充电量大于90%即可接受新的“起飞巡航”命令。
127.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。