1.本实用新型涉及检测领域,具体是一种用于风力机叶片损伤巡检的无人机。
背景技术:
2.截至2019年底,我国风电装机容量达209.94gw,自2008年以来一直保持世界第一,占全球累计风电装机量的32.24%。我国自本世纪初开始大力发展风电行业至今,首批风力机已经接近寿命极限,甚至部分风力机己经超出质保期,这便造成风力机的故障层出不穷。其中,造成故障最为严重、检测难度最大和维护成本最高的部件损伤当属风力机叶片。
3.通过对叶片定期常规检测的结果统计发现,叶片表面缺陷主要有:风力机安装前期出现的斑点和擦痕,风力机安装中、后期出现的砂眼、裂纹、边缘腐蚀和开裂、表面涂层脱落以及恶劣天气下的雷击损伤;一般情况下,斑点、擦痕和砂眼是风力机叶片普遍存在的缺陷,大面积的斑点和砂眼聚集就会形成危害性大大增加的麻面。这类麻面如遇雷雨天气,由于静电灰多、湿度大造成导电性增强,极易引来雷击;如遇高温、大风等天气,麻面处凹陷部分的玻璃纤维就会迅速风化形成脆裂层。两种情况都会造成叶片的严重损坏,甚至出现风力机停机检修的情况。因此对风力机叶片损伤高效准确地进行识别和分类,为风力机叶片的故障检测与维修提供及时准确的参考依据变得尤为重要。
4.在实现本实用新型的过程中,发明人发现现有技术中至少存在如下问题:
5.现阶段风力机叶片损伤检测主要依靠人工吊篮高空作业,存在检测效率慢、数据采集危险系数高、相机抖动导致清晰度不足和成本高昂等一系列问题。
技术实现要素:
6.本实用新型的目的在于提供一种用于风力机叶片损伤巡检的无人机,以解决上述背景技术中提出的至少一个技术问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种用于风力机叶片损伤巡检的无人机,包括无人机搭载平台和高清云台相机模块,所述无人机搭载平台中部固定安装有外壳,外壳内侧中部固定安装有视觉伺服控制模块,用于确定无人机巡检航线和飞行拍摄过程中的视觉导航纠偏与防误撞,所述视觉伺服控制模块左侧固定安装有蓄电池,蓄电池上方固定安装有扇叶电机控制模块;
9.所述外壳内侧右部固定安装有无人机控制模组,无人机控制模组顶端固定安装有图像处理模块,用于接收无人机拍摄采集到的高清图像,并对风力机叶片图像进行损伤检测和分类处理。图像处理系统模块具有训练完成的风力机叶片检测模型,将风力机叶片检测模型和相关代码载入到图像处理系统模块中,可实现对图像中的风机叶片损伤进行检测识别和分类;
10.所述无人机搭载平台边缘处固定安装有转轴,转轴外侧套设安装有支架,支架端部固定安装有扇叶电机,扇叶电机顶端固定安装有扇叶,所述无人机搭载平台内侧边缘处下部嵌设固定安装有雷达探头,所述无人机搭载平台底端固定安装有左右对称的起落架,
所述无人机搭载平台底端中部固定安装有对称设置的螺头杆,螺头杆外侧中部固定安装有内弹簧,内弹簧边缘处固定安装有滑板,滑板套设安装在螺头杆外侧,所述内弹簧采用双内径形弹簧,所述滑板顶端固定安装有上胶套,所述滑板底端固定安装有下胶套,下胶套和上胶套套设安装在螺头杆外侧,所述下胶套和上胶套内部分别固定安装有异形弹簧,异形弹簧采用沙漏型异形弹簧,所述下胶套内壁与螺头杆外壁紧密套设滑接,所述螺头杆外侧下部套设安装有压板,所述螺头杆端部位于压板下方且旋接安装有自锁螺母,所述滑板中部贯穿固定安装有高清云台相机模块,用于采集机舱和叶片的图像轮廓信息,定位装置采集无人机的实时位置信息,高清云台相机模块和定位装置均将采集到的信息反馈至视觉伺服控制系统模块,可提供稳定流畅的影像画质,拍摄出高精度的稳定画面。当安装到无人机搭载平台模块上,即使在高速运转状态下,通过云台相机模块的防抖动等技术,让拍摄画面更稳定,得到清晰的画质,为后续处理提供高质量数据基础。
11.作为本实用新型进一步的方案:所述无人机搭载平台顶端固定安装有防护板。
12.作为本实用新型再进一步的方案:所述起落架包括减震弹簧架,减震弹簧架外侧下部固定安装有着陆支撑架,位于同一着陆支撑架上部的两个所述减震弹簧架呈前后对称设置,两个所述起落架左右对称插接固定安装在无人机搭载平台底端。
13.作为本实用新型再进一步的方案:所述高清云台相机模块包括伺服转台、云台相机、伺服电机和折架,所述伺服转台的转轴底端固定安装有折架,折架呈直角状弯折设置,所述折架左侧下部贯穿固定安装有伺服电机,伺服电机的电机轴右端固定安装有云台相机,所述伺服转台、云台相机和伺服电机通过线束与视觉伺服控制模块和蓄电池电性连接。
14.作为本实用新型再进一步的方案:所述雷达探头采用微型电磁波测距雷达,所述雷达探头的数量至少为八个。
15.作为本实用新型再进一步的方案:所述支架端部设置有支片,支片通过螺栓与扇叶电机固定连接,扇叶电机前后侧壁开设有上下对称的螺栓装配孔,所述扇叶电机通过线束与扇叶电机控制模块和蓄电池电性连接。
16.作为本实用新型再进一步的方案:位于左部的所述支架斜面朝下安装,位于右部的所述支架斜面朝上安装,方便位于同侧的两个支架折叠时不相互影响,有效的控制无人机搭载平台的长度。
17.作为本实用新型再进一步的方案:所述支架与无人机搭载平台边缘处的主轴之间套设安装有阻尼防滑套。
18.作为本实用新型再进一步的方案:所述无人机控制模组通过线束与扇叶电机控制模块、图像处理模块和视觉伺服控制模块电性连接,所述无人机控制模组采用微型无人机控制主机。
19.作为本实用新型再进一步的方案:所述蓄电池采用微型锂电池,所述无人机控制模组与蓄电池电性连接,所述外壳后侧开设有与蓄电池配合的检修板。
20.与现有技术相比,本实用新型的有益效果是:
21.本实用新型在结构上设计合理,采用组合式的结构,可以进行快捷的拆装组合,方便携带到野外进行叶片的情况进行检测,代替人工进行安全可靠工作和对风机叶片损伤的准确检测识别和分类,同时采用合理的振动吸收,大大提高装置的防抖动能力,保证拍照清晰度,实用性很高。
附图说明
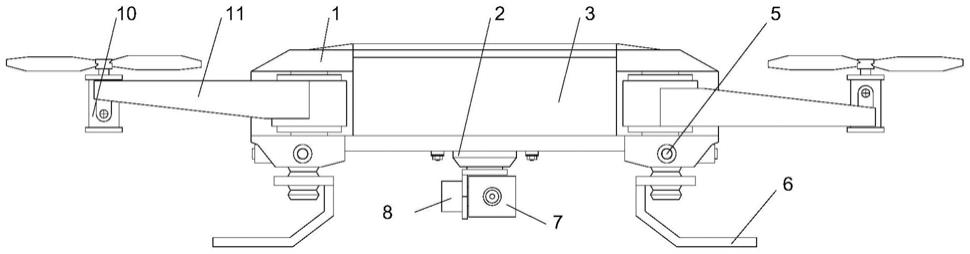
22.图1为一种用于风力机叶片损伤巡检的无人机的结构示意图;
23.图2为一种用于风力机叶片损伤巡检的无人机内部的结构示意图;
24.图3为一种用于风力机叶片损伤巡检的无人机中下部的放大示意图;
25.图4为一种用于风力机叶片损伤巡检的无人机中无人机搭载平台、螺头杆、滑板和内弹簧之间的结构示意图。
26.图中:无人机搭载平台1、伺服转台2、外壳3、蓄电池4、雷达探头5、起落架6、云台相机7、伺服电机8、扇叶电机控制模块9、扇叶电机10、支架11、无人机控制模组12、图像处理模块13、视觉伺服控制模块14、折架15、螺头杆16、滑板17、内弹簧18、下胶套19、上胶套20、异形弹簧21、压板22。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1至图4,本实用新型实施例中,一种用于风力机叶片损伤巡检的无人机,包括无人机搭载平台1和高清云台相机模块,无人机搭载平台1中部固定安装有外壳3,外壳3内侧中部固定安装有视觉伺服控制模块14,视觉伺服控制模块14左侧固定安装有蓄电池4,蓄电池4上方固定安装有扇叶电机控制模块9,外壳3内侧右部固定安装有无人机控制模组12,无人机控制模组12顶端固定安装有图像处理模块13,无人机搭载平台1边缘处固定安装有转轴,转轴外侧套设安装有支架11,支架11端部固定安装有扇叶电机10,扇叶电机10顶端固定安装有扇叶,无人机搭载平台1内侧边缘处下部嵌设固定安装有雷达探头5,无人机搭载平台1底端固定安装有左右对称的起落架6,无人机搭载平台1底端中部固定安装有对称设置的螺头杆16,螺头杆16外侧中部固定安装有内弹簧18,内弹簧18边缘处固定安装有滑板17,滑板17套设安装在螺头杆16外侧,内弹簧18采用双内径形弹簧,滑板17顶端固定安装有上胶套20,滑板17底端固定安装有下胶套19,下胶套19和上胶套20套设安装在螺头杆16外侧,下胶套19和上胶套20内部分别固定安装有异形弹簧21,异形弹簧21采用沙漏型异形弹簧,下胶套19内壁与螺头杆16外壁紧密套设滑接,螺头杆16外侧下部套设安装有压板22,螺头杆16端部位于压板22下方旋接安装有自锁螺母,滑板17中部贯穿固定安装有高清云台相机模块。
29.无人机搭载平台1顶端固定安装有防护板。起落架6包括减震弹簧架,减震弹簧架外侧下部固定安装有着陆支撑架,位于同一着陆支撑架上部的两个减震弹簧架呈前后对称设置,两个起落架6左右对称插接固定安装在无人机搭载平台1底端。
30.高清云台相机模块包括伺服转台2、云台相机7、伺服电机8和折架15,伺服转台2的转轴底端固定安装有折架15,折架15呈直角状弯折设置,折架15左侧下部贯穿固定安装有伺服电机8,伺服电机8的电机轴右端固定安装有云台相机7,伺服转台2、云台相机7和伺服电机8通过线束与视觉伺服控制模块14和蓄电池4电性连接。
31.雷达探头5采用微型电磁波测距雷达,雷达探头5的数量至少为八个。
32.支架11端部设置有支片,支片通过螺栓与扇叶电机10固定连接,扇叶电机10前后侧壁开设有上下对称的螺栓装配孔,扇叶电机10通过线束与扇叶电机控制模块9和蓄电池4电性连接。
33.位于左部的支架11斜面朝下安装,位于右部的支架11斜面朝上安装,方便位于同侧的两个支架11折叠时不相互影响,有效的控制无人机搭载平台1的长度。
34.支架11与无人机搭载平台1边缘处的主轴之间套设安装有阻尼防滑套。
35.无人机控制模组12通过线束与扇叶电机控制模块9、图像处理模块13和视觉伺服控制模块14电性连接,无人机控制模组12采用微型无人机控制主机。
36.蓄电池4采用微型锂电池,无人机控制模组12与蓄电池4电性连接,外壳3后侧开设有与蓄电池4配合的检修板。
37.本实用新型的工作原理是:
38.本实用新型涉及一种用于风力机叶片损伤巡检的无人机,本装置包括无人机搭载平台模块、视觉伺服控制系统模块、高清云台相机模块和图像处理系统模块。无人机搭载平台模块是整个系统设备的搭载平台。高清云台相机模块悬挂转动连接于无人机下方;视觉伺服控制模块和图像处理系统模块集成搭载在无人机搭载平台。
39.无人机搭载平台模块,是整个系统设备的搭载平台。不仅包含了无人机自身控制系统、测距雷达(用于防止碰撞异物),还用于承载和连接视觉伺服控制模块、高清云台相机模块和图像处理系统模块。
40.视觉伺服控制系统模块,用于确定无人机巡检航线和飞行拍摄过程中的视觉导航纠偏与防误撞。
41.高清云台相机模块采集机舱和叶片的图像轮廓信息,定位装置采集无人机的实时位置信息,高清云台相机模块和定位装置均将采集到的信息反馈至视觉伺服控制系统模块。
42.对于飞行拍摄过程中的视觉导航纠偏,视觉伺服控制系统模块在无人机飞行拍摄时,定位模块实时反馈无人机的实时位置信息至视觉伺服控制系统;视觉伺服控制系统根据反馈的无人机的实时位置信息与规划好的航点对比来进行视觉导航纠偏,同时也实现了防止无人机与叶片碰撞的功能。
43.高清云台相机模块,可提供稳定流畅的影像画质,拍摄出高精度的稳定画面。当安装到无人机搭载平台模块上,即使在高速运转状态下,通过云台相机模块的防抖动等技术,让拍摄画面更稳定,得到清晰的画质,为后续处理提供高质量数据基础。
44.图像处理系统模块,用于接收无人机拍摄采集到的高清图像,并对风力机叶片图像进行损伤检测和分类处理。图像处理系统模块具有训练完成的风力机叶片检测模型,将风力机叶片检测模型和相关代码载入到图像处理系统模块中,可实现对图像中的风机叶片损伤进行检测识别和分类。
45.该方案可保证无人机设备的安全可靠工作和图像的准确采集。
46.且装置的扇叶电机10可以进行快捷的拆装,拆下后可以将支架11折叠,收纳方便,且装置的起落架插接装配,可以快捷拆解;
47.同时装置的高清云台相机模块带有防抖动等技术,同时为了充分防抖,本装置的无人机搭载平台1与高清云台相机模块之间通过柔性连接结构装配,内弹簧18的设置,可以
吸收水平方向的振动,振动产生的振动再通过滑板17与无人机搭载平台1的摩擦进行消耗,同时上下方向的振动最多,通过上下两组的异形弹簧21进行柔性吸收,且异形弹簧21采用沙漏型异形弹簧,压缩行程小时因为异形弹簧21的边缘内径大所以弹簧弹力小,压缩行程大时因为异形弹簧21的中部内径小所以弹簧弹力增加,可以分段进行振动吸收,保证稳定的同时,避免弹簧过硬导致微小振动无法吸收,并通过下胶套19和螺头杆16的摩擦进行吸收,大大提高装置的防抖动能力。
48.本实用新型在结构上设计合理,采用组合式的结构,可以进行快捷的拆装组合,方便携带到野外进行叶片的情况进行检测,代替人工进行安全可靠工作和对风机叶片损伤的准确检测识别和分类,同时采用合理的振动吸收,大大提高装置的防抖动能力,保证拍照清晰度,实用性很高。
49.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
50.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。