1.本实用新型涉及无人机技术领域,具体为一种光伏电站电池组件巡查用无人机。
背景技术:
2.无人驾驶飞机简称无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等,与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作,一些光伏电站通常会使用无人机对电池组件进行巡查,现有的无人机,通常都是一个长方形的机身,机身四角处设有电动高速螺旋桨,机身的下方固定有摄像头,这种无人机虽然也可以用于巡查作业,但是无人机的能耗大,飞行时长短,不能够灵活调节无人机的倾角,不方便无人机向不同角度飞行,不能够对摄像头进行多角度灵活调节,不能实现电池组件的全面巡查作业,为此,我们提出一种光伏电站电池组件巡查用无人机。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种光伏电站电池组件巡查用无人机,能够对摄像头进行多角度灵活调节,实现电池组件的全面巡查作业,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种光伏电站电池组件巡查用无人机,包括机架、可调节摄像机构、配重调节机构和机翼机构;
5.机架:其中心处设有两个对称分布的中心柱,两个中心柱之间设有控制仓,控制仓的内部下端设有蓄电池,蓄电池的上表面设有隔板;
6.可调节摄像机构:设置于下端的中心柱中部开设的安装槽内;
7.配重调节机构:设置于隔板的上表面外侧;
8.机翼机构:对称设置于机架的上端,能够极大减小空气的阻力,减小无人机的能耗,增大无人机的飞行时长,能够灵活调节无人机的倾角,方便无人机向不同角度飞行,能够对摄像头进行多角度灵活调节,实现电池组件的全面巡查作业。
9.进一步的,还包括信号收发器和plc控制器,所述信号收发器和plc控制器均设置于隔板的上表面中部,信号收发器与plc控制器双向电连接,plc控制器的输入端电连接蓄电池的输出端,调控无人机的正常运行。
10.进一步的,所述可调节摄像机构包括一号电机、安装圆板和电动推杆,所述一号电机设置于下端的中心柱中部开设的安装槽内,安装圆板设置于一号电机的输出轴下端,电动推杆设置于安装圆板的下表面中部,一号电机和电动推杆的输入端均电连接plc控制器的输出端,能够实现下方部件的多角度灵活调节。
11.进一步的,所述可调节摄像机构还包括摄像头,所述摄像头设置于电动推杆的伸缩端下端,摄像头的输出端电连接plc控制器的输入端,对巡查现场进行拍摄巡查。
12.进一步的,所述配重调节机构包括齿环,所述齿环设置于隔板的上表面外侧,为其它部件的运行提供导向支撑。
13.进一步的,所述配重调节机构还包括齿轮、二号电机和滑座,所述滑座均滑动连接于齿环的上端,二号电机分别设置于滑座的上表面内侧,二号电机的输出轴下端分别穿过对应的滑座内端圆孔,齿轮分别设置于二号电机的输出轴下端,齿轮均与齿环啮合连接,二号电机的输入端电连接plc控制器的输出端,能够实现无人机的倾斜与平衡调节。
14.进一步的,所述机翼机构包括安装撑杆和电动高速螺旋桨,所述安装撑杆对称设置于机架的上端,电动高速螺旋桨分别设置于安装撑杆的上端以及上方的中心柱上端,电动高速螺旋桨的输入端电连接plc控制器的输出端,能够引导空气流向,使无人机进行飞行。
15.与现有技术相比,本实用新型的有益效果是:本光伏电站电池组件巡查用无人机,具有以下好处:
16.1、使用人员通过外部控制设备发射控制信号,信号收发器把接收到的控制信号传递给plc控制器,plc控制器调控电动高速螺旋桨工作,电动高速螺旋桨转动引导上方的空气向下流动,使上方形成瞬间的真空,在大气压强的作用下,无人机向上飞,机架为圆杆组合成的机架,控制仓为梭行控制仓,能够极大减小空气的阻力,减小无人机的能耗,增大无人机的飞行时长。
17.2、通过plc控制器的调控,二号电机工作,输出轴带动齿轮转动,使得滑座带着上方部件沿齿环滑动,以此打破两个配重调节机构的相对平衡,使得无人机发生倾斜,在电动高速螺旋桨的作用下,无人机朝倾斜方向飞行,在飞至光伏电站巡查位置时,通过plc控制器的调控,二号电机工作,使两个配重调节机构重新回至平衡状态,能够灵活调节无人机的倾角,方便无人机向不同角度飞行。
18.3、通过plc控制器的调控,二号电机工作,使两个配重调节机构重新回至平衡状态,使无人机平衡,摄像头开始对下方的光伏电站进行拍摄巡查,摄像头把拍摄的数据传递给plc控制器,plc控制器把接收到的数据整合后发送给信号收发器,信号收发器再把信号传递给外部控制设备,作业员可以通过外部控制设备的显示面板观察摄像头拍摄到的画面,通过plc控制器的调控,一号电机工作,带动下方部件转动,以此可以使摄像头拍摄的不同角度的画面,在需要近距离拍摄电池组时,可能会遇到一些无人机无法下落的位置,此时,通过plc控制器的调控,电动推杆工作,伸缩端伸展,推动摄像头向下移动,以此可以使摄像头伸入到无人机无法下落的位置进行拍摄巡查,能够对摄像头进行多角度灵活调节,实现电池组件的全面巡查作业。
附图说明
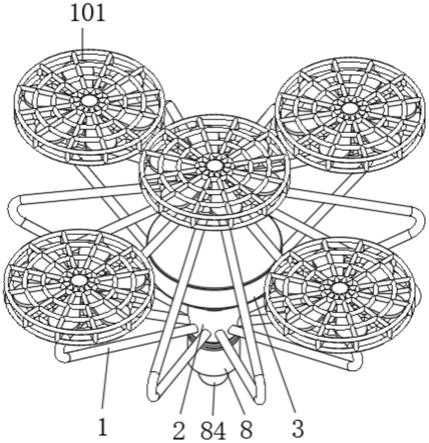
19.图1为本实用新型结构示意图;
20.图2为本实用新型仰视结构示意图;
21.图3为本实用新型可调节摄像机构的结构示意图;
22.图4为本实用新型a处放大结构示意图。
23.图中:1机架、2中心柱、3控制仓、4蓄电池、5隔板、6信号收发器、7plc控制器、8可调节摄像机构、81一号电机、82安装圆板、83电动推杆、84摄像头、9配重调节机构、91齿轮、92齿环、93二号电机、94滑座、10机翼机构、101安装撑杆、102电动高速螺旋桨。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1
‑
4,本实施例提供一种技术方案:一种光伏电站电池组件巡查用无人机,包括机架1、可调节摄像机构8、配重调节机构9和机翼机构10;
26.机架1:机架1为圆杆组合成的机架,为其它部件提供一个安装场所,其中心处设有两个对称分布的中心柱2,两个中心柱2之间设有控制仓3,控制仓3为梭行控制仓,方便其它部件的安装,控制仓3的内部下端设有蓄电池4,蓄电池4为其它部件的运行提供能源输出,蓄电池4的上表面设有隔板5,还包括信号收发器6和plc控制器7,信号收发器6和plc控制器7均设置于隔板5的上表面中部,信号收发器6与plc控制器7双向电连接,plc控制器7的输入端电连接蓄电池4的输出端,使用人员通过外部控制设备发射控制信号,信号收发器6把接收到的控制信号传递给plc控制器7;
27.可调节摄像机构8:可调节摄像机构8能够实现摄像头84的灵活调节,设置于下端的中心柱2中部开设的安装槽内,可调节摄像机构8包括一号电机81、安装圆板82和电动推杆83,一号电机81设置于下端的中心柱2中部开设的安装槽内,安装圆板82设置于一号电机81的输出轴下端,电动推杆83设置于安装圆板82的下表面中部,一号电机81和电动推杆83的输入端均电连接plc控制器7的输出端,可调节摄像机构8还包括摄像头84,摄像头84设置于电动推杆83的伸缩端下端,摄像头84的输出端电连接plc控制器7的输入端,摄像头84开始对下方的光伏电站进行拍摄巡查,摄像头84把拍摄的数据传递给plc控制器7,plc控制器7把接收到的数据整合后发送给信号收发器6,信号收发器6再把信号传递给外部控制设备,作业员可以通过外部控制设备的显示面板观察摄像头84拍摄到的画面,通过plc控制器7的调控,一号电机81工作,带动下方部件转动,以此可以使摄像头84拍摄的不同角度的画面,在需要近距离拍摄电池组时,可能会遇到一些无人机无法下落的位置,此时,通过plc控制器7的调控,电动推杆83工作,伸缩端伸展,推动摄像头84向下移动,以此可以使摄像头84伸入到无人机无法下落的位置进行拍摄巡查;
28.配重调节机构9:配重调节机构9能够实现无人机的倾斜与平衡调节,设置于隔板5的上表面外侧,配重调节机构9包括齿环92,齿环92设置于隔板5的上表面外侧,配重调节机构9还包括齿轮91、二号电机93和滑座94,滑座94均滑动连接于齿环92的上端,二号电机93分别设置于滑座94的上表面内侧,二号电机93的输出轴下端分别穿过对应的滑座94内端圆孔,齿轮91分别设置于二号电机93的输出轴下端,齿轮91均与齿环92啮合连接,二号电机93的输入端电连接plc控制器7的输出端,在无人机上升到一定高度后,通过plc控制器7的调控,二号电机93工作,输出轴带动齿轮91转动,使得滑座94带着上方部件沿齿环92滑动,以此打破两个配重调节机构9的相对平衡,使得无人机发生倾斜,在电动高速螺旋桨102的作
用下,无人机朝倾斜方向飞行;
29.机翼机构10:机翼机构10能够带动下方部件进行飞行,对称设置于机架1的上端,机翼机构10包括安装撑杆101和电动高速螺旋桨102,安装撑杆101对称设置于机架1的上端,电动高速螺旋桨102分别设置于安装撑杆101的上端以及上方的中心柱2上端,电动高速螺旋桨102的输入端电连接plc控制器7的输出端,plc控制器7调控电动高速螺旋桨102工作,电动高速螺旋桨102转动引导上方的空气向下流动,使上方形成瞬间的真空,在大气压强的作用下,无人机向上飞。
30.本实用新型提供的一种光伏电站电池组件巡查用无人机的工作原理如下:使用人员通过外部控制设备发射控制信号,信号收发器6把接收到的控制信号传递给plc控制器7,plc控制器7调控电动高速螺旋桨102工作,电动高速螺旋桨102转动引导上方的空气向下流动,使上方形成瞬间的真空,在大气压强的作用下,无人机向上飞,机架1为圆杆组合成的机架,控制仓3为梭行控制仓,能够极大减小空气的阻力,在无人机上升到一定高度后,通过plc控制器7的调控,二号电机93工作,输出轴带动齿轮91转动,使得滑座94带着上方部件沿齿环92滑动,以此打破两个配重调节机构9的相对平衡,使得无人机发生倾斜,在电动高速螺旋桨102的作用下,无人机朝倾斜方向飞行,在飞至光伏电站巡查位置时,通过plc控制器7的调控,二号电机93工作,使两个配重调节机构9重新回至平衡状态,使无人机平衡,摄像头84开始对下方的光伏电站进行拍摄巡查,摄像头84把拍摄的数据传递给plc控制器7,plc控制器7把接收到的数据整合后发送给信号收发器6,信号收发器6再把信号传递给外部控制设备,作业员可以通过外部控制设备的显示面板观察摄像头84拍摄到的画面,通过plc控制器7的调控,一号电机81工作,带动下方部件转动,以此可以使摄像头84拍摄的不同角度的画面,在需要近距离拍摄电池组时,可能会遇到一些无人机无法下落的位置,此时,通过plc控制器7的调控,电动推杆83工作,伸缩端伸展,推动摄像头84向下移动,以此可以使摄像头84伸入到无人机无法下落的位置进行拍摄巡查。
31.值得注意的是,以上实施例中所公开的plc控制器7具体型号为s7
‑
200,信号收发器6可选用型号为ata6624c
‑
pgqw
‑
1的信号收发器,一号电机81和二号电机93均可选用型号为wk35byj412
‑
12v的步进电机,摄像头84可选用型号为lv3396的摄像头,plc控制器7控制信号收发器6、一号电机81、二号电机93、摄像头84和电动高速螺旋桨102工作采用现有技术中常用的方法。
32.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。