用于自行车的电动齿轮马达组件
1.本发明总体上涉及一种用于自行车的齿轮马达组件,特别是一种用于所谓的踏板辅助自行车或“电动自行车”的电动齿轮马达组件。明确指出的是,在此上下文中,表述“踏板辅助自行车”用于表示具有一个(独轮车)、两个、三个(三轮车)或更多个轮(四轮车、人力车等)的任何载具,该载具既由人的肌肉力量驱动,又设置有至少一个辅助电动马达。
2.众所周知,踏板辅助自行车或“电动自行车”是一种常规自行车,该自行车应用有至少一个电动马达、一个或更多个电池和若干传感器,这些传感器即时检测踏板曲柄/踏板组件的旋转速度。该旋转速度由电子控制单元编码,该电子控制单元基于预定的参数针对骑车者的动作来校准由电动马达提供的附加支持。
3.迄今为止,踏板辅助自行车使用耦接到不同类型的减速齿轮的无刷电动马达,该无刷电动马达驱动其上旋转有踏板曲柄/踏板组件的轴。与此类齿轮马达相关的问题通常来自尺寸、重量和运行温度。传动装置往往具有多个减速级,并且它们有时与电磁离合器耦合,这些电磁离合器在布置有减速齿轮的相同曲柄箱内运行,使得整个齿轮马达组件过热并因此造成效率损失。此外,由于传动装置的尺寸相当大,需要将电动马达安装并因此定位在自行车框架上。最后,由于这些电动马达的总体效率不超过0.7,因此通常需要加大电动马达的尺寸以达到所需的功率。事实上,在频繁使用时,电动马达往往会过热,并且由于它无法冷却,因此需要电子控制单元的干预,这包括减少供应的电流,从而降低了电动马达的一般性能。
4.当前用于踏板辅助自行车的齿轮马达组件的另一问题在于以下事实,在不使用的情况下,电动马达仍保持连接到其上旋转有踏板曲柄/踏板组件的轴。因此,在正常或非辅助蹬踏期间,骑车者被迫也使用相关传动装置来驱动电动马达。
5.例如,在文献cn 2234906 y中描述了根据现有技术的用于自行车的齿轮马达组件。
6.因此,本发明的目的在于提供一种用于自行车的齿轮马达组件,特别是用于所谓的踏板辅助自行车或“电动自行车”的电动齿轮马达组件,该齿轮马达组件能够以极其简单、经济且特别实用的方式克服现有技术的上述缺点。
7.详细地,本发明的目的是提供一种用于踏板辅助自行车的齿轮马达组件,如果电动马达无法干预并因此正常或非辅助蹬踏时,该齿轮马达组件允许骑车者不必使用相关传动装置来驱动这种电动自行车。
8.本发明的另一目的是提供一种用于踏板辅助自行车的齿轮马达组件,该齿轮马达组件允许提高电动马达的效率并增加电池组的持续时间。
9.根据本发明的这些目的和其他目的通过提供根据权利要求1中所述的用于踏板辅助自行车的齿轮马达组件来实现。
10.本发明的另外的特征由从属权利要求强调,该从属权利要求是本说明书的组成部分。
11.根据以下以非限制性示例的方式提供的描述,并参考附图,根据本发明的用于踏板辅助自行车的齿轮马达组件的特征和优点将变得更加明显,其中:
12.图1是根据本发明的用于踏板辅助自行车的齿轮马达组件的优选实施方式的立体图;
13.图2是图1的齿轮马达组件的俯视平面图;
14.图3是图1的齿轮马达组件的侧视立视图;
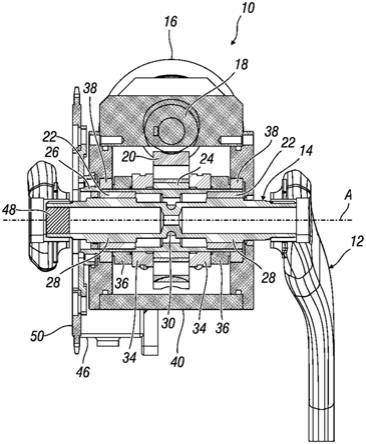
15.图4是图1的齿轮马达组件沿图3的线iv-iv获得的剖视图;
16.图5是图1的齿轮马达组件的部分部件的局部分解图;以及
17.图6是图1的齿轮马达组件的另一部分部件的透视图。
18.参考附图,示出了根据本发明的用于踏板辅助自行车的齿轮马达组件的优选实施方式。齿轮马达组件整体用附图标记10表示。齿轮马达组件10被配置为应用于下述类型的自行车(未示出)的踏板曲柄/踏板组件12,该类型的自行车包括至少一个框架和至少一个驱动轮。驱动轮通过传动系统连接到踏板曲柄/踏板组件12,该传动系统可以是常规类型的,诸如例如链条传动系统,该链条传动系统包括:与踏板曲柄/踏板组件12一体地接合的一个或更多个带齿链盘;以及与驱动轮一体地接合的一个或更多个链轮。
19.因此,本身为已知类型的自行车可以设置有转向件、至少一个前部转向轮、制动系统、鞍座、和其他可能的附件。可以应用齿轮马达组件10的自行车也可以不是常规的两轮类型,而是该自行车可以包括独轮车、三轮车或人力车,只要该自行车设置有踏板曲柄/踏板组件12以及具有至少一个驱动轮的传动系统。
20.齿轮马达组件10包括至少一个踏板曲柄轴14,该踏板曲柄轴可以绕预定轴线a旋转运动,该预定轴线通常是水平的并垂直于自行车的前进方向。以本身已知的方式,踏板曲柄轴14与踏板曲柄/踏板组件12一体地接合,以接收骑车者通过所述踏板曲柄/踏板组件12传递的扭矩并通过传动系统将扭矩传送到自行车的驱动轮。
21.齿轮马达组件10还包括至少一个电动马达16,该电动马达设置有电子控制单元及其自身的减速齿轮机构18、20。以本身已知的方式,电子控制单元可以集成不同的扩展模块,诸如例如wi-fi模块、蓝牙、gsm、加速度计、陀螺仪、称重单元等。
22.详细地,减速齿轮机构18、20是包括蜗杆18和齿轮20的类型,该蜗杆与电动马达16的输出轴42一体地接合,该齿轮绕踏板曲柄轴14同轴地布置。还是以本身已知的方式,减速齿轮机构18、20被配置为接收由电动马达16传递的扭矩,并且通过踏板曲柄轴14和传动系统将该扭矩传送到自行车的驱动轮,该传动系统例如为具有一个或更多个带齿链盘和一个或更多个链轮的常规链条类型。
23.根据本发明,齿轮马达组件10包括:至少一个内部超越离合器22,该内部超越离合器绕踏板曲柄轴14同轴地安装;以及至少一个外部超越离合器24,该外部超越离合器同轴地安装在减速齿轮机构18、20的齿轮20的内部。内部超越离合器22和外部超越离合器24两者均由相应的自由轮机构构成。众所周知,自由轮机构是一种机械装置,位于两个同轴旋转的组件之间的该自由轮机构允许根据这两个组件的相对角速度连接或解耦接该两个组件。
24.在外部超越离合器24和内部超越离合器22之间间置有至少一个中空管状元件26,该中空管状元件运动学地连接到自行车的驱动轮以传送由骑车者或由电动马达16通过减速齿轮机构18、20传递的扭矩。换言之,中空管状元件26直接连接到自行车传动系统,该自行车传动系统可以是例如具有一个或更多个带齿链盘的常规链条类型,其中之一在图4中以附图标记50示出并且它被直接安装在所述中空管状元件26和一个或更多个链轮上。
25.特别地,内部超越离合器22通过过盈被容置在中空管状元件26中,而外部超越离合器24通过过盈被容置在这种中空管状元件26的外部。内部超越离合器22被配置为在踏板曲柄轴14的第一旋转方向上传送扭矩,而外部超越离合器24被配置为在踏板曲柄轴的第二旋转方向上传送扭矩,该第二旋转方向与踏板曲柄轴14的第一旋转方向相反。
26.详细地,如图4的剖视图所示,踏板曲柄轴14设置有两个相反的矫正座28,绕每个矫正座通过过盈安装相应的内部超越离合器22。因此,齿轮马达组件10优选地设置有被放置为直接与踏板曲柄轴14接触的两个不同的内部超越离合器22。
27.形成两个内部超越离合器22的外部壳体的中空管状元件26优选地由矫正管构成,绕该矫正管居中地容置了齿轮20,即在两个内部超越离合器22之间的中间位置处容置齿轮,单个外部超越离合器24被同轴地安装在该齿轮内。换言之,如图4所示,外部超越离合器24位于环绕它的齿轮20和中空管状元件26之间。
28.两个内部超越离合器22被配置为在相同的旋转方向上锁定,该相同的旋转方向与踏板曲柄轴14的第一旋转方向一致。另一方面,外部超越离合器24被配置为在相反的旋转方向上锁定,该相反的旋转方向与踏板曲柄轴14的第二旋转方向一致。
29.优选地,如图6所示,踏板曲柄轴14在外部超越离合器24处以及在齿轮20处居中地设置有至少一个径向凹槽30,该至少一个径向凹槽形成用于至少一个销32的壳体。销32具有使踏板曲柄轴14居中的功能,即避免该踏板曲柄轴在轴向方向上的移位,并且该销允许踏板曲柄/踏板组件12向后旋转的自由,即在第二旋转方向上旋转的自由。
30.绕中空管状元件26接合的相应轴向轴承34相对于踏板曲柄轴14的预定轴线a被定位于齿轮20的两侧。每个轴向轴承34由对应的间隔元件36保持在合适的位置。最后,位于两个间隔元件36外侧的是两个另外的轴承38,该两个另外的轴承除了将齿轮马达组件10的相对于踏板曲柄轴14同轴的所有元件保持在合适的位置之外,还保证所述踏板曲柄轴14在两个方向上的旋转自由。
31.因此,根据本发明的齿轮马达组件10如下进行操作。安装在中空管状元件26和踏板曲柄轴14之间的两个内部超越离合器22在正常蹬踏期间被锁定。然后,中空管状元件26由踏板曲柄/踏板组件12旋转,并将扭矩传送到带齿链盘50。
32.还是在正常蹬踏期间,安装在中空管状元件26与减速齿轮机构18、20的齿轮20之间并且相对于两个内部超越离合器22在相反方向上锁定的外部超越离合器24反而是自由的。因此,电动马达16和减速齿轮机构18、20都与自行车传动系统分离,并且蹬踏是流畅的。
33.当电动马达16与减速齿轮机构18、20一起干预时,外部超越离合器24被接合,沿与蹬踏相同的旋转方向驱动中空管状元件26,并且因此也驱动带齿链盘50。即使电动马达16和减速齿轮机构18、20旋转得比它们预定的最大限度快(这是一种假设情况,因为电子控制单元会进行干预,以使旋转方式回到预定的最大限度),它们仍然不会驱动踏板曲柄/踏板组件12,因为两个内部超越离合器22将相对于踏板曲柄轴14解锁定。相反,如果骑车者以非常快的频率蹬踏,骑车者会使得绕踏板曲柄轴14布置的两个内部超越离合器22卡住,但会将布置在减速齿轮机构18、20的齿轮20中的外部超越离合器24释放。在任何情况下,结果总是获得不受电动马达16影响并且尽可能自然的蹬踏。
34.齿轮马达组件10设置有曲柄箱40,该曲柄箱容置踏板曲柄轴14、整个减速齿轮机构18、20与内部超越离合器22和外部超越离合器24、以及相应的附加部件(轴承、间隔元件
等)。换言之,只有齿轮马达组件10的电动马达16位于曲柄箱40的外部以连接到减速齿轮40,而相应的输出轴42至少部分地插入到所述曲柄箱40中以连接到减速齿轮机构18、20。
35.由于减速齿轮机构18、20与电动马达16是分开的,因此该减速齿轮机构远离由电动马达16构成的热源。此外,蜗杆18被定位为相对于齿轮20相切以及被定位为正交于踏板曲柄轴14的旋转轴线a的这个事实使得电动马达16能够相对于自行车框架以任何角度(最多360
°
)自由定位。
36.电动马达16可以设置有冷却系统,该冷却系统包括:液压回路44,该液压回路至少部分地环绕该电动马达16;和至少一个泵46,该至少一个泵被布置成使冷却流体以预定压力在液压回路44内循环。泵46可以由电动马达16的输出轴42驱动,或者泵可以自主驱动并由通常设置在踏板辅助自行车上的电池组供电。
37.由于电动马达16优选地是无刷型的并且它被容纳在柱形外壳中,液压回路44优选地是螺旋形的,以用于在外部缠绕所述电动马达16的外壳的最大可能表面。还可以设置安装在电动马达16的外壳处的一个或更多个消散元件(未示出)。由于电动马达16的强制冷却,可以使用在大小和功率方面小得多的无刷马达,并且相对于用于踏板辅助自行车的常规电动马达重量更轻,而不会降低负载下的效率和性能。另外,考虑到相同的可用功率,电池组的使用寿命将持续较长。
38.踏板曲柄轴14可以设置有至少一个扭矩传感器48,诸如例如扭矩计,该扭矩传感器可操作地连接到电子控制单元并且优选地定位在带齿链盘50处。除了测量扭矩之外,该扭矩传感器48在从静态启动时特别地有利,尤其是在上坡或在泥泞的地面上蹬踏时。事实上,该扭矩传感器48按比例检测骑车者施加在踏板曲柄/踏板组件12上的扭矩,并且与电子控制单元对接,该扭矩传感器允许选择性地启用电动马达16以确保毫不费力就能静态启动。
39.通常,目前用于踏板辅助自行车的电动马达没有设置扭矩传感器,而是具有踏板曲柄轴的角速度的简单传感器。因此,目前的辅助踏板自行车在静态启动时,需要在踏板曲柄/踏板组件上大力推动,然后轻微地驱动踏板曲柄轴旋转,并允许角速度传感器识别哪怕是最小的速度,从而使电动马达进行干预。
40.由此可见,根据本发明的用于踏板辅助自行车的齿轮马达组件实现了上述目的。
41.根据本发明如此构思的用于踏板辅助自行车的齿轮马达组件在任何情况下都易于进行许多修改和变化,所有这些都落入相同发明构思的范围内;此外,所有细节还可以用技术上等效的元素代替。基本上,使用的材料以及形状和尺寸可以根据技术需要而变化。
42.因此,本发明的保护范围由所附权利要求限定。