1.本实用新型涉及自动驾驶技术领域,尤其涉及一种能自主检测拖挂夹角的集卡车。
背景技术:
2.集卡车中,长轴距的牵引车在牵引挂车转弯时,存在比一般车辆更大区域的内轮差,这是后轮转弯半径远小于前轮导致的。在转弯过程中,如果有人员进入内轮差范围,存在有安全隐患。牵引车和挂车的夹角精度是自动驾驶车辆控制算法中一个重要的参数。夹角精度的计算直接影响了车辆控制效果以及自动驾驶集卡运行的安全性。
3.传统集卡车通过发射红外线信号测算挂车车体到牵引车车头的距离,转换为牵引车与挂车车体夹角,这种检测方式精度较低,无法满足日益增长的高精度检测需求。
4.自动驾驶集卡牵引车和挂车目前通常是装一个专用的激光雷达,配合一个激光雷达反光板进行角度测量。该方案一是成本高,二是稳定性差,因为反光板经常被尘土或污泥弄脏,测过出来的角度不准甚至没有结果。
5.由此可见,目前尚需一种具有成本低、可靠性高的拖挂夹角检测能力的集卡车。
技术实现要素:
6.实用新型要解决的问题:
7.针对上述问题,本实用新型的目的在于提供一种结构简单、可靠性稳定性优异的能自主检测拖挂夹角的集卡车。
8.解决问题的技术手段:
9.为解决上述问题,本实用新型提供一种能自主检测拖挂夹角的集卡车,
10.包括提供驱动力的牵引车、载置集装箱且通过牵引销连接所述牵引车的挂车以及检测所述牵引车与所述挂车之间的拖挂夹角的拖挂夹角检测系统;
11.所述拖挂夹角检测系统包括:
12.以朝向所述挂车的形式设置于所述牵引车的两侧的第一摄像单元和第二摄像单元;
13.设置于所述挂车的外侧横梁的被检测单元;以及
14.计算所述拖挂夹角的运算单元;
15.所述运算单元内存储有预先标定得到的视觉标定信息,所述视觉标定信息从所述集卡车在标定状态下所述第一摄像单元和所述第二摄像单元拍摄的图像中得到;
16.所述第一摄像单元和所述第二摄像单元对所述被检测单元分别拍摄第一图像和第二图像,所述运算单元从所述第一图像和所述第二图像中分别提取出第一特征信息和第二特征信息,根据所述第一特征信息、所述第二特征信息和所述视觉标定信息计算所述拖挂夹角。
17.根据本实用新型,通过在牵引车和挂车上分别加装拍摄装置、被检测单元以及运
算单元,能在集卡车的行驶过程中实时计算牵引车和挂车之间的夹角。
18.也可以是,本实用新型中,所述被检测单元是两色相间的格子。
19.也可以是,本实用新型中,所述集卡车的所述标定状态是所述牵引车与所述挂车之间夹角为零时的状态。
20.也可以是,本实用新型中,所述视觉标定信息是所述集卡车在所述标定状态下所述格子的长度、格子数或所述格子上的特征点;所述第一特征信息和所述第二特征信息是所述第一图像和所述第二图像中所述格子的长度、格子数或所述格子上的特征点。
21.也可以是,本实用新型中,所述拖挂夹角检测系统还包括报警单元,所述报警单元在所述运算单元计算出的所述拖挂夹角超过规定的角度时进行警报。
22.实用新型效果:
23.本实用新型能能可靠地实现牵引车与拖车之间夹角的自主检测,其结构简单、成本低廉。
附图说明
24.图1是根据本技术一实施形态的能自主检测拖挂夹角的集卡车的结构示意图;
25.图2是图1所示能自主检测拖挂夹角的集卡车处于通常行驶状态的示意图;
26.图3是图1所示能自主检测拖挂夹角的集卡车处于标定状态的示意图;
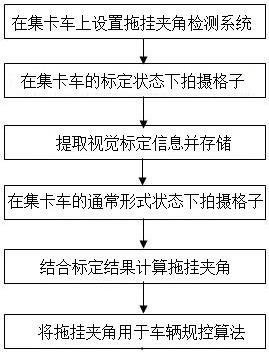
27.图4是能自主检测拖挂夹角的集卡车的拖挂夹角检测过程的流程图;
28.符号说明:
29.100、集卡车;1、牵引车;2、挂车2;11、第一摄像单元;12、第二摄像单元;21、被检测单元。
具体实施方式
30.以下结合附图和下述实施方式进一步说明本实用新型,应理解,附图和下述实施方式仅用于说明本实用新型,而非限制本实用新型。
31.针对现有集卡车中检测拖挂夹角需要对车辆结构进行大幅改变、加装激光雷达等部件而造成成本高昂的问题,本实用新型提一种结构简单、成本低廉的能自主检测拖挂夹角的集卡车。
32.图1是根据本技术一实施形态的能自主检测拖挂夹角的集卡车(以下有时简称“集卡车”)的结构示意图。如图1所示,本实用新型的集卡车100包括牵引车、挂车2以及拖挂夹角检测系统。
33.牵引车1是集卡车100的车头,内设发动机,为集卡车100提供牵引动力。挂车2用于载置集装箱,其通过牵引销摆动自如地连接在牵引车1的后方。在转向过程中,牵引车1车头转向较快先进入弯道,牵引车1所牵引的挂车2转向慢于牵引车1。尤其是在转弯半径较小时,由于牵引车1与挂车2之间的夹角、即拖挂夹角较大,会导致出现检测盲区。
34.如图1所示,在集卡车100上设置有用于自主检测牵引车1与挂车2之间的拖挂夹角的拖挂夹角检测系统。拖挂夹角检测系统包括摄像装置、被检测单元以及运算单元。
35.摄像装置包括第一摄像单元11和第二摄像单元12。第一摄像单元11和第二摄像单元12可以是侧后视摄像头,其分别以朝向牵引车1的后方、即朝向挂车2的形式对称设置于
牵引车1周视的左右两侧,对设置在挂车2上的后述被检测单元21进行拍摄。
36.又如图1所示,在挂车2的两个外侧横梁上分别设置有用于供上述摄像装置检测的被检测单元21,在集卡车100转弯而使挂车2相对于牵引车1偏移、即形成拖挂夹角时,被检测单元21与上述摄像装置之间的相对位置关系发生变化,通过分析该相对位置关系能求出集卡车100的拖挂夹角。本实施形态中,被检测单元21可以是由在挂车2横梁上涂布的反光漆而构成的一行红白相间的格子,但不限于此,被检测单元21也可以是棋盘格或其他类似的图案。
37.运算单元从摄像装置拍摄的图像中提取相应的特征信息以自主计算集卡车100的拖挂夹角。换言之,运算单元集成了视觉提取功能和拖挂夹角计算功能。但本实用新型不限于此,也可以运算单元仅负责拖挂夹角的计算,而在运算单元之外另行设置从图像中提取特征信息的视觉信息提取单元。
38.图2是集卡车100处于通常行驶状态的示意图,需要说明的是,此处的通常行驶状态是指集卡车100在通常转弯过程中的行驶状态。如图2所示,在集卡车100的通常行驶状态下,第一摄像单元11和第二摄像单元12分别对被检测单元21进行拍摄得到用于运算单元计算拖挂夹角的第一图像和第二图像。运算单元从第一摄像单元11和第二摄像单元12拍摄得到的第一图像和第二图像中分别提取第一特征信息和第二特征信息。该第一特征信息和第二特征信息可以是运算单元通过视觉感知算法从图像中提取得到的上述格子的长度、格子数或格子上的特征点。具体而言,首先按照算法检测要求设计作为被检测单元21的格子的长度和宽度以及格子里的图案,然后通过摄像装置可以拍到的含有被检测单元21格子的图片,同时采集满足算法训练的一定数量的相关图片,算法在设计时就已经对格子的特征(图案、长度、宽度以及色泽等)有了考虑,所以含有这类特征的格子会自动匹配到算法的特征提取上。
39.然而,仅根据第一特征信息和第二特征信息还不足以计算拖挂夹角,在计算拖挂夹角之前,还需要对拖挂夹角检测系统进行标定。图3是集卡车100处于标定状态的示意图。
40.具体而言,如图3所示在集卡车100的标定状态下对拖挂夹角检测系统进行标定,该集卡车100的标定状态是指牵引车1与挂车2之间夹角为零、即两者呈一直线时的状态。在第一摄像单元11和/或第二摄像单元12在标定状态拍摄上述格子得到标定图像。运算单元从标定图像中提取视觉标定信息,视觉标定信息可以是集卡车100在标定状态下时上述格子的长度、格子数或格子上的特征点。该视觉标定信息预先存储在运算单元中作为计算拖挂夹角的基准数据。
41.由此,运算单元根据预先存储的从标定图像中提取得到的视觉标定信息和从第一图像和第二图像中分别提取得到的第一特征信息和第二特征信息,通过一套专用的软件算法计算得到集卡车100的拖挂夹角。
42.具体地,算法会根据格子的特征图案以及长度、宽度、色泽去提取相关特征点作为特征信息,同时格子在图片中的位置是相对固定的,算法每次只需在图片的固定位置去搜索和匹配相关特征,就可以达到准确识别的目的。
43.图4是能自主检测拖挂夹角的集卡车100的拖挂夹角检测过程的流程图。如图4所示,首先在集卡车100的挂车2外侧横梁上涂上反光漆,形成用于检测的红白相间的格子图案。在牵引车1的左右两侧以朝向挂车2上的格子的形式对称一对后视摄像头。
44.接着将集卡车100调节至牵引车1和挂车2呈一直线的标定状态,打开牵引车1周视左右一对后视摄像头感知挂车2外侧横梁上的格子图案并拍摄标定图像。
45.运算单元通过视觉感知算法从标定图像中提取并储存视觉标定信息。
46.在集卡车100处于通常行驶状态下,一对后视摄像头持续拍摄挂车2上的格子团案得到第一图像和第二图像,运算单元从第一图像和第二图像中提取上述第一特征信息和第二特征信息,通过专用的软件算法结合视觉标定信息实时计算集卡车100的拖挂夹角,并将该拖挂夹角上传至集卡车100的自动驾驶中枢用于车辆规控算法。
47.本实用新型中,拖挂夹角检测系统还可以包括报警单元,该报警单元在运算单元计算出的拖挂夹角超过规定的角度时进行警报。
48.根据上述结构,只要在现有集卡车的牵引车和挂车上分别加装拍摄装置、被检测单元以及运算单元,就能在重复使用集卡车的已有零部件的基础上实现自主检测拖挂夹角。这种能够自主检测拖挂夹角的集卡车结构简单,可靠性优异。
49.以上的具体实施方式对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,应当理解的是,以上仅为本实用新型的一种具体实施方式而已,并不限于本实用新型的保护范围,在不脱离本实用新型的基本特征的宗旨下,本实用新型可体现为多种形式,因此本实用新型中的实施形态是用于说明而非限制,由于本实用新型的范围由权利要求限定而非由说明书限定,而且落在权利要求界定的范围,或其界定的范围的等价范围内的所有变化都应理解为包括在权利要求书中。凡在本实用新型的精神和原则之内的,所做出的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。