1.本技术实施例涉及吸氢材料的吸氢控制领域,并且更具体地,涉及高精度充氢控制装置、充氢控制方法和设备。
背景技术:
2.对于国内外研究氢脆材料或储氢结构材料的科研工作者,往往需要对材料吸氢过程进行精确计量和控制。同时还需要对材料吸氢温度进行研究,但是,截止目前,并没有控制吸氢计量和吸氢温度的装置,对这方面材料的研究造成障碍。
3.因此,本领域亟需一种能够控制吸氢计量和吸氢温度的装置。
技术实现要素:
4.本技术提供了一种高精度充氢控制装置、充氢控制方法和设备,能够同时控制吸氢计量和吸氢温度。
5.一方面,提供了一种材料的高精度充氢控制装置,其特征在于,包括:
6.氢气发生器,该氢气发生器用于产生氢气;
7.计量室,该氢气发生器通过控制阀门连接至该计量室;
8.真空室,该计量室通过第一阀门连接至该真空室,该计量室的空间小于该真空室的空间;该真空室的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料,该容纳管道和该真空室之间形成有过渡腔;
9.管式炉,该管式炉包括炉盖和底座,该炉盖和该底座中间可形成有用于包覆该容纳管道的管状空间,该容纳管道设置在该管状空间的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境;
10.其中,该控制阀门用于控制该氢气发生器向该计量室输入的氢气的量,该第一阀门用于将该计量室的氢气输入至该真空室,以便该待吸氢材料在充氢环境下吸收氢气。
11.另一方面,提供了一种充氢控制方法,其特征在于,该高精度充氢控制装置包括氢气发生器、计量室、真空室以及管式炉;该氢气发生器用于产生氢气;该氢气发生器通过控制阀门连接至该计量室,该计量室的空间小于该真空室的空间;该真空室的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料,该容纳管道和该真空室之间形成有过渡腔;该管式炉包括炉盖和底座,该炉盖和该底座中间可形成有用于包覆该容纳管道的管状空间,该容纳管道设置在该管状空间的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境;
12.该方法包括:
13.通过控制该控制阀门的状态,使得该计量室从该该氢气发生器获取预设量的氢气;
14.开启该第一阀门,使得该计量室的氢气输入至该真空室,以便该待吸氢材料在充氢环境下吸收氢气。
15.另一方面,提供了一种充氢控制设备,其特征在于,该高精度充氢控制装置包括氢气发生器、计量室、真空室以及管式炉;该氢气发生器用于产生氢气;该氢气发生器通过控制阀门连接至该计量室,该计量室的空间小于该真空室的空间;该真空室的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料,该容纳管道和该真空室之间形成有过渡腔;该管式炉包括炉盖和底座,该炉盖和该底座中间可形成有用于包覆该容纳管道的管状空间,该容纳管道设置在该管状空间的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境;
16.该设备包括:
17.第一控制单元,用于通过控制该控制阀门的状态,使得该计量室从该该氢气发生器获取预设量的氢气;
18.第二控制单元,用于开启该第一阀门,使得该计量室的氢气输入至该真空室,以便该待吸氢材料在充氢环境下吸收氢气。
19.另一方面,本技术实施例提供了一种电子设备,包括:
20.处理器,适于执行计算机程序;
21.计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,该计算机程序被该处理器执行时,实现上述充氢控制方法。
22.另一方面,本技术实施例提供一种计算机可读存储介质,该计算机可读存储介质存储有计算机指令,该计算机指令被计算机设备的处理器读取并执行时,使得计算机设备执行上述充氢控制方法。
23.本技术实施例中,一方面,将该氢气发生器设计为通过控制阀门连接至该计量室,可以使得该氢气发生器能够获取定量的氢气,以实现对该待吸氢材料的吸氢量进行精确计量;另一方面,将该真空室的一端设计成容纳管道,并将该容纳管道设置在管式炉的内部,能够构建出温度大于预设阈值的充氢环境,即实现对该待吸氢材料的吸氢温度进行控制,此外,将该计量室设计为通过第一阀门连接至该真空室,在开启该第一阀门的情况下,能够使得该容纳管道中的待吸氢材料能够吸收到该计量室中的氢气,进而能够实现对该待吸氢材料的吸氢量和吸氢温度的控制。
24.此外,将该计量室的空间设计为小于该真空室的空间,即可以使得该计量室的空间的较小且该真空室的空间较大,由此不仅能够提升计量室对氢气进行计量时的准确度,还能够为该待吸氢材料提供足够的容纳空间,也能够提升真空室的氢气的含量,进而,能够提升待吸氢材料吸收氢气的效率,降低时间成本。另外,将该容纳管道和该真空室之间设计为过渡腔,有利于真空室中的氢气过渡到该容纳管道,不仅能够提升待吸氢材料吸收氢气的效率,降低时间成本,还能够避免氢气在该真空室的部分区域形成聚集,保证了进入真空室的氢气均可被待吸氢材料吸收,进而,提升了对待吸氢材料的吸氢量的控制的准确度。
附图说明
25.图1是本技术实施例提供的高精度充氢控制装置的示意性结构图。
26.图2是本技术实施例提供的管式炉的结构的示意图。
27.图3是本技术实施例提供的充氢控制方法的示意性流程图。
28.图4至图11是本技术实施例提供的控制图1所示的高精度充氢控制装置的方法的
示例。
29.图12是本技术实施例提供的充氢控制设备的示意性结构图。
30.图13是本技术实施例提供的电子设备的示意性框图。
具体实施方式
31.下面将结合附图,对本技术实施例中的技术方案进行描述。
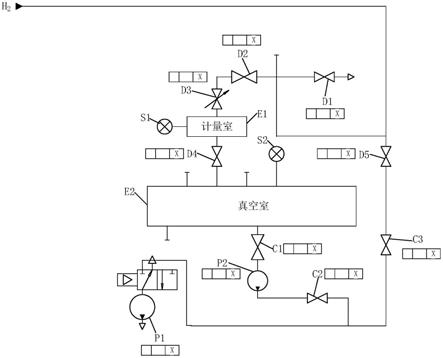
32.图1是本技术实施例提供的高精度充氢控制装置的示意性结构图。
33.如图1所示,该高精度充氢控制装置可包括:
34.氢气发生器,该氢气发生器用于产生氢气h2;
35.计量室(dosing cell)e1,该氢气发生器通过控制阀门d3连接至该计量室e1;
36.真空室(hydrogenation cell)e2,该计量室e1通过第一阀门d4连接至该真空室e2;该真空室e2的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料;
37.管式炉,该容纳管道设置在该管式炉的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境。
38.其中,该控制阀门d3用于控制该氢气发生器向该计量室e1输入的氢气的量,该第一阀门d4用于将该计量室e1的氢气输入至该真空室e2,以便该待吸氢材料在充氢环境下吸收氢气。
39.本技术实施例中,一方面,将该氢气发生器设计为通过控制阀门d3连接至该计量室e1,可以使得该氢气发生器能够获取定量的氢气,以实现对该待吸氢材料的吸氢量进行精确计量;另一方面,将该真空室e2的一端设计成容纳管道,并将该容纳管道设置在管式炉的内部,能够构建出温度大于预设阈值的充氢环境,即实现对该待吸氢材料的吸氢温度进行控制,此外,将该计量室e1设计为通过第一阀门d4连接至该真空室e2,在开启该第一阀门d4 的情况下,能够使得该容纳管道中的待吸氢材料能够吸收到该计量室e1中的氢气,进而能够实现对该待吸氢材料的吸氢量和吸氢温度的控制。
40.在一些实施例中,该计量室e1的空间小于该真空室e2的空间。
41.本实施例中,该计量室e1的空间设计为小于该真空室e2的空间,即可以使得该计量室e1的空间的较小且该真空室e2的空间较大,由此不仅能够提升计量室e1对氢气进行计量时的准确度,还能够为该待吸氢材料提供足够的容纳空间,也能够提升真空室e2的氢气的含量,进而,能够提升待吸氢材料吸收氢气的效率,降低时间成本。
42.需要说明的是,本技术对计量室e1和真空室e2的具体形状不作限定。例如该计量室e1或该真空室e2为规则形状,以保证氢气均匀的分布在e1或该真空室e2的内部空间中,当然,也可以为不规则形状,本技术对此不作限定。此外,本技术对真空室e2和计量室e1的真空度不作具体限定。作为一个示例,在空载条件下,真空室e2和计量室e1的真空度应优于1
×
10-4
pa;作为另一示例,在加热条件下,例如加热至400℃的情况下,该真空室e2 和计量室e1的真空度优于5
×
10-5
pa。
43.本技术中,该真空室e2可以与管式炉相连,从而可以构成高温充氢环境,具体地,容纳管道可以是与真空室e2相连的石英或者陶瓷管,然后通过对石英或者陶瓷管进行加热,从而使材料处于预设温度。当然,本技术对管式炉的具体实现方式不作限定。
44.图2是本技术实施例提供的管式炉100的结构的示意图。
45.如图2所示,该管式炉100可包括炉盖130和底座140。其中,炉盖130 和底座140中间可形成有用于包覆容纳管道110的管状空间,该容纳管道110 可设置在该管状空间内。
46.在一些实施例中,该底座140可设置有温度控制器,例如pid温度控制器。该pid温度控制器的温度控制范围为室温~550℃,该pid温度控制器的温度精度为
±
1℃。
47.在一些实施例中,该管状空间内可设置有用于加热和/或保温的器件,例如加热电磁或保温电磁,以精确控制纳管道110的温度。
48.例如,该管状空间内的顶部区域131可设置有用于加热和/或保温的器件。再如,该管状空间内的底部区域141可设置有用于加热和/或保温的器件。可选的,该管状空间内可设置有用于加热和/或保温的且与该容纳管道110接触或不接触的器件。
49.在一些实施例中,待吸氢材料可通过送料杆120送入到容纳管道110内。
50.在一些实现方式中,该容纳管道110可以是真空室e2的一部分。例如该容纳管道110可以是可拆卸的器件,再如该容纳管道110也可以是与真空室 e2形成一体结构。类似的,该管式炉100可以是可拆卸的器件,也可以是与真空室e2形成一体结构。可拆卸设置的管式炉100有利于根据需求组装该高精度充氢控制装置。
51.在一些实施例中,该容纳管道和该真空室e2之间形成有过渡腔。
52.将该容纳管道和该真空室e2之间设计为过渡腔,有利于真空室e2中的氢气过渡到该容纳管道,不仅能够提升待吸氢材料吸收氢气的效率,降低时间成本,还能够避免氢气在该真空室e2的部分区域形成聚集,保证了进入真空室e2的氢气均可被待吸氢材料吸收,进而,提升了对待吸氢材料的吸氢量的控制的准确度。可选的,该过渡腔的表面可设置有保温层,防止温度流失与烫伤。例如,该保温层可以是锡纸。
53.在一些实施例中,该高精度充氢控制装置还包括:
54.第一传感器s1,该第一传感器s1与该计量室e1连接,该第一传感器s1 用于测量该计量室e1的压强,该计量室e1的压强用于表征已输入到该计量室e1的氢气的量。
55.在一种实现方式中,该高精度充氢控制装置还包括:与该第一传感器s1 连接的微机,与该第一传感器s1连接的微机用于读取、写入以及记录该第一传感器s1测量到的数据。
56.本实施例中,该第一传感器s1测量到的数据用于控制控制阀门d3的开启或关闭,进而控制计量室中氢气的分量。
57.在一些实施例中,该高精度充氢控制装置还包括:
58.第二传感器s2,该第二传感器s2与该真空室e2连接,该第二传感器s2 用于测量该真空室e2的压强,该第二传感器s2的感测精度大于该第一传感器s1的感测精度。
59.在一种实现方式中,该高精度充氢控制装置还包括:与该第二传感器s2 连接的微机,与该第二传感器s2连接的微机用于读取、写入以及记录该第二传感器s2测量到的数据。
60.本实施例中,该第二传感器s2测量到的数据可用于判断该真空室e2是否达到注入氢气的条件,以及该真空室e2中的待吸氢材料是否已经完成对氢气的吸收。此外,该第二传感器s2检测到的数据还可用于反映真空室e2的氢气含量,通过对氢气含量的变化过程进行分析,可精确计算出该待吸氢材料的已吸收的氢气的含量,进而反映该待吸氢材料的吸氢过程,克服了之前无法精确测量待吸氢材料的吸氢过程的困难。
61.当然,在其他可替代实施例中,该高精度充氢控制装置也可仅包括第二传感器s2,本技术对此不作具体限定。
62.在一些实施例中,该高精度充氢控制装置还包括:
63.进气管道,该进气管道的一端通过第二阀门d2连接至该控制阀门d3的一端,该控制阀门d3的另一端连接至该计量室e1,该进气管道的另一端通过第三阀门d1连接至该氢气发生器。
64.换言之,该进气管道可用于缓冲氢气发生器输出的氢气的流速,以降低对控制阀门d3的操作要求,另一方面,该进气管道还可用于对氢气发生器产生的氢气进行存储,降低计量室e1获取定量氢气的时间,进而降低吸氢过程的时间成本。
65.在一些实施例中,该高精度充氢控制装置还包括:
66.分子真空泵p2和机械真空泵p1;
67.其中,该分子真空泵p2通过第四阀门c1连接至该真空室e2,该机械真空泵p1还通过第五阀门c2连接至该分子真空泵p2,该机械真空泵p1通过第六阀门c3连接至第七阀门d5的一端,该第七阀门d5的另一端连接至该进气管道;
68.其中,该第四阀门c1为该分子真空泵p2的启动阀门,该第五阀门c2 为该机械真空泵p1的主启动阀门,该第五阀门c2用于控制该机械真空泵p1 抽取该真空室e2中的气体,该第六阀门c3为该机械真空泵p1的辅启动阀门,该机械真空泵p1、该第六阀门c3以及该第七阀门d5用于形成该进气管道的旁路气路,该旁路气路用于该机械真空泵p1抽取该进气管道中的气体。
69.应理解,分子真空泵p2也可称为高压真空泵(hv pump),机械真空泵 p1也可称为低压真空泵(lv pump),分子真空泵p2可用于抽取真空室e2中的气体,以达到高真空状态,机械真空泵p1可用于抽取真空室e2中的气体,以达到低真空状态,换言之,分子真空泵p2抽真空的能力高于机械真空泵 p1抽真空的能力。可选的,该第四阀门c1可以是该分子真空泵p2与真空室 e2之间的插板阀。该第五阀门c2可以是该分子真空泵p2与机械真空泵p1 之间的电磁阀。可选的,该第四阀门c1可以是电动阀门,该第七阀门d5可以是机械阀门。当然,在其他可替代实施例中,该机械真空泵p1可以通过第六阀门c3或该第七阀门d5直接连接至该进气管道,本技术对此不作具体限定。
70.由于机械真空泵p1在低真空抽取时抽取效果高,分子真空泵p2在该真空抽取时抽取效果高且在高温下的稳定性较好,本技术通过引入两级真空泵,能够对真空室e2的气体进行分级抽取,进而,能够在控制时间成本的基础上,使得正空时e2达到对待充氢材料进行充氢的压强要求。
71.此外,通过旁路气路的设计,一方面,该旁路气路通过该第七阀门d5 与该机械真空泵p1连接,该机械真空泵p1可以直接用于将第二阀门d2和该第三阀门d1之间的进气管道中的氢气、以及该第二阀门d2和氢气发生器之间残余氢气抽走,防止关闭氢气发生器时除计量室e1和真空室e2之外的气路中残余氢气,提高安全性。此外,该旁路气路还能够用于与计量室e1和真空室e2形成环路,进而在利用氢气对该高精度充氢控制装置进行冲洗时,有利于对环路中的各个分段分别双向冲洗,进而提升冲洗效果。
72.下面结合附图对充氢控制方法进行说明。
73.图2是本技术实施例提供的充氢控制方法200的示意性流程图。该方法 200适用于高精度充氢控制装置。例如,该方法200适用于控制图1所示的高精度充氢控制装置,即即该高精度充氢控制装置包括氢气发生器、计量室 e1、真空室e2以及管式炉;该氢气发生器用
于产生氢气;该氢气发生器通过控制阀门d3连接至该计量室e1,该计量室e1的空间小于该真空室e2的空间;该计量室e1通过第一阀门d4连接至该真空室e2;该真空室e2的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料,该容纳管道和该真空室 e2之间形成有过渡腔;该管式炉包括炉盖和底座,该炉盖和该底座中间可形成有用于包覆该容纳管道的管状空间,该容纳管道设置在该管状空间的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境;为便于说明,下面结合图1所示的附图标记对该方法200进行说明。
74.如图2所示,该方法200可包括:
75.s210,通过控制该控制阀门d3的状态,使得该计量室e1从该该氢气发生器获取预设量的氢气;
76.s220,开启该第一阀门d4,使得该计量室e1的氢气输入至该真空室e2,以便该待吸氢材料在充氢环境下吸收氢气。
77.在一些实施例中,该高精度充氢控制装置还包括第一传感器s1,该第一传感器s1与该计量室e1连接;其中,该s210可包括:
78.基于该待吸氢材料吸氢后该真空室e2和该计量室e1所形成的空间的最终压强、该待吸氢材料的质量和该待吸氢材料的吸氢量,确定该计量室e1的最大压强;基于该最大压强,通过控制该控制阀门d3的状态,使得该计量室 e1从该氢气发生器获取预设量的氢气。
79.在一些实现方式中,基于以下公式确定该最大压强:
80.pi=(p
e-ms*c
t
/k)/λ;
81.其中,pi表示该最大压强,pe表示该最终压强,ms表示该待吸氢材料的质量,c
t
表示该待吸氢材料的吸氢量,k表示比例因子,λ表示该真空室e2 和该计量室e1所形成的空间的压强和该计量室e1的压强的比值。
82.换言之,该最终压强pe是最大压强pi、该待吸氢材料的质量ms和该待吸氢材料的吸氢量c
t
的函数。
83.在具体实现中,可以通过压力传感器s1的测量结果,得到充氢过程中计量室e1的压强,当计量室e1充至需要压强时,可以停止充氢过程。此时,计量室e1具有压强pi,即最大压强,待吸氢材料经过吸氢后,计量室e1和真空室e2的最终压强为pe。
84.需要说明的是,本技术对上述公式中中的参数不作具体限定。例如k和该高精度充氢控制装置有关,是该高精度充氢控制装置的固有属性。具体实现中,可以由实验获取k的取值。作为一个示例,该k的取值可以为 660.ppm.g.mbar-1。例如λ可以是一个常数,和该高精度充氢控制装置有关,是该高精度充氢控制装置的固有属性。即不同的高精度充氢控制装置具有不同的λ。作为示例,当管式炉的温度为400℃,真空室e2的温度为40℃时,λ约为0.03082。
85.在一些实现方式中,在该第一传感器s1检测到的该计量室e1的压强等于最大压强时,关闭该控制阀门d3。
86.换言之,可以直接将该待吸氢材料需要吸收的定量氢气,一次性的输入到该计量室e1。
87.在一些实现方式中,基于该最大压强,确定该待吸氢材料吸收氢气前该真空室e2和该计量室e1所形成的空间的初始压强;在该初始压强和该最终压强之间的压降大于或等
于预设阈值时,将该压降划分为多个压降;确定多个压降分别对应的多个触发压强,该多个触发压强分别对应多次充氢过程;针对该多次充氢过程中的每一次充氢过程,在该第一传感器s1测量的压强达到该充氢过程对应的触发压强的情况下,关闭该控制阀门d3。
88.换言之,可以直接将该待吸氢材料需要吸收的定量氢气,分为多次输入到该计量室e1。即将一次充氢过程划分为多级充氢过程。示例性的,假设通过大概计算获知,该待吸氢材料吸氢所造成的压降为10mbar,则可以将一次充氢过程分为两次充氢过程,第一次充氢过程控制压降为3mbar,第二次充氢过程控制压降为7mbar。
89.对于有些材料,充氢过程中不能使材料周围压强过大,这种情况下就需要多级充氢。具体地,对于部分材料,若真空室e2内的初始氢压强太大,待吸氢材料的表面会产生氢鼓泡,不仅会使得待吸氢材料表面产生氢损耗,进而降低了吸氢计量的准确度,还会降低待吸氢材料的吸氢效率,增加了时间成本。本实施例中,通过多次充氢过程,能够使得真空室e2的初始压强较小,避免了该待吸氢材料的表面产生鼓泡,不仅会避免对该待吸氢材料表面产生氢损耗,进而提升了吸氢计量的准确度,还能够提升该待吸氢材料的吸氢效率,降低时间成本。
90.在一些实现方式中,可通过以下公式,利用该最大压强确定该待吸氢材料吸收氢气前该真空室e2和该计量室e1所形成的空间的初始压强:
91.pd=λpi;
92.其中,pd表示该初始压强,pi表示该最大压强,λ表示该真空室e2和该计量室e1所形成的空间的压强和该计量室e1的压强的比值。可选的,λ可以是一个常数,和该高精度充氢控制装置有关,是该高精度充氢控制装置的固有属性。即不同的高精度充氢控制装置具有不同的λ。作为示例,当管式炉的温度为400℃,真空室e2的温度为40℃时,λ约为0.03082。
93.在一些实现方式中,可基于该多个压降和上述最终压强,分别确定该待吸氢材料吸收氢气前该真空室e2和该计量室e1所形成的空间的多个压强,然后基于该多个压强,利用λ分别确定该多个触发压强。
94.在一些实施例中,该高精度充氢控制装置还包括第二传感器s2,该第二传感器s2与该真空室e2连接,该第二传感器s2的感测精度大于该第一传感器s1的感测精度;其中,该s210可包括:
95.在开启该控制阀门d3和该第一阀门d4的情况下,获取该第二传感器s2 的检测到的压强;
96.在该第二传感器s2检测到的压强小于或等于预设压强的情况下,关闭该第一阀门d4并开启该控制阀门d3,直至该计量室e1从该该氢气发生器获取预设量的氢气时关闭该控制阀门d3。
97.在一些实施例中,该高精度充氢控制装置还包括进气管道,该进气管道的一端通过第二阀门d2连接至该控制阀门d3的一端,该控制阀门d3的另一端连接至该计量室e1,该进气管道的另一端通过第三阀门d1连接至该氢气发生器;其中,该s210可包括:
98.开启该第二阀门d2和该控制阀门d3,直至该计量室e1从该该氢气发生器获取预设量的氢气时关闭该第二阀门d2和该控制阀门d3。
99.在一些实施例中,该高精度充氢控制装置还包括分子真空泵p2和机械真空泵p1;
该分子真空泵p2通过第四阀门c1连接至该真空室e2,该机械真空泵p1还通过第五阀门c2连接至该分子真空泵p2,该机械真空泵p1通过第六阀门c3连接至第七阀门d5的一端,该第七阀门d5的另一端连接至该进气管道;
100.其中,该s210之前,该方法200还可包括:
101.通过控制该控制阀门d3、该第一阀门d4、该第二阀门d2、该第四阀门 c1、该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,利用该氢气发生器产生的氢气对该高精度充氢控制装置至少清洗一次;通过控制该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,利用该氢气发生器产生的氢气对该进气管道至少清洗一次。
102.本实施例中,通过控制该控制阀门d3、该第一阀门d4、该第二阀门d2、该第四阀门c1、该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,在利用氢气对该高精度充氢控制装置进行冲洗时,有利于对该第二阀门d2和该第真空室e2之间的气路或空间以分段为单位进行冲洗,进而,能够提升其冲洗效果。
103.下面结合图4至图11对具体控制方法进行示例性说明。
104.应理解,图1、图4至图11中,相同的附图标记表示相同的部件,为避免重复,图4至图11中的各个部件可参考针对图1的描述,本实施例不再进行赘述。此外,图4至图11中的阿拉伯数字可代表执行的序号,图4至图 11中的o可代表开启阀门,图4至图11中的x可代表关闭阀门,为避免重复,下文不再赘述。
105.图4是本技术实施例提供的控制图1所示的高精度充氢控制装置的低真空抽取方法的示例。
106.如图4所示,控制图1所示的高精度充氢控制装置的低真空抽取方法可包括以下步骤:
107.步骤1:开启机械真空泵p1。
108.步骤2:开启第五阀门c2。
109.步骤3:开启第四阀门c1。
110.本实施例中,在开启第四阀门c1后,机械真空泵p1抽取真空室e2的空气,直至第二传感器s2测量得到的压强反映该真空室e2的正空度达到低真空状态。
111.图5是本技术实施例提供的控制图1所示的高精度充氢控制装置的高真空抽取方法的示例。
112.如图5所示,控制图1所示的高精度充氢控制装置的高真空抽取方法可包括以下步骤:
113.步骤1:开启分子真空泵p2。
114.例如,在真空室e2的压强小于10-1
mbar时,开启分子真空泵p2,直至分子真空泵p2的角速度w为1500hz时,通过第二传感器s2获取真空室e2 的压强。
115.本实施例中,在开启分子真空泵p2后,分子真空泵p2抽取真空室e2 的空气,直至第二传感器s2测量得到的压强反映该真空室e2的正空度达到高真空状态。
116.图6是本技术实施例提供的控制图1所示的高精度充氢控制装置的进行腔体清洗的方法的示例。
117.如图6所示,控制图1所示的高精度充氢控制装置的进行腔体清洗的方法可包括以下步骤:
118.步骤1:开启第五阀门c2。
119.步骤2:开启第六阀门c3。
120.步骤3:开启第七阀门d5。
121.步骤4:关闭第七阀门d5。例如,开启第七阀门d5持续时间达到10s 后,关闭第七阀门d5。
122.步骤5:关闭第六阀门c3。
123.步骤6:开启第五阀门c2。
124.步骤7:关闭第一阀门d4。
125.步骤8:开启第二阀门d2。
126.步骤9:开启控制阀门d3。
127.步骤10:关闭第四阀门c1。例如,直至真空室e2的压强大于50mbar 时,关闭第四阀门c1。
128.步骤11:开启第一阀门d4。
129.步骤12:关闭第二阀门d2。例如,直至真空室e2的压强大于100mbar 时,关闭第四阀门c1。
130.步骤13:关闭控制阀门d3。
131.步骤14:开启第四阀门c1。
132.步骤15:开启控制阀门d3。例如,直至真空室e2的压强小于5
×
10-5
mbar 时,开启控制阀门d3。
133.步骤16:关闭控制阀门d3。例如,开启控制阀门d3的持续时间达到10s 后,关闭控制阀门d3。
134.步骤17:关闭第五阀门c2。
135.步骤18:开启第六阀门c3。
136.步骤19:开启第七阀门d5。
137.步骤20:关闭第七阀门d5。例如,开启第七阀门d5的持续时间达到10s 后,关闭第七阀门d5。
138.步骤21:关闭第六阀门c3。
139.步骤22:开启第五阀门c2。
140.在一些实现方式中,可以将步骤7到步骤16循环执行多次,例如将步骤 7到步骤16循环执行3次。
141.本实施例中,通过控制该控制阀门d3、该第一阀门d4、该第二阀门d2、该第四阀门c1、该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,利用该氢气发生器产生的氢气对该高精度充氢控制装置至少清洗一次。
142.图7是本技术实施例提供的控制图1所示的高精度充氢控制装置的旁路气路进行清洗的方法的示例。
143.如图7所示,控制图1所示的高精度充氢控制装置的旁路气路进行清洗的方法可包括以下步骤:
144.步骤1:关闭第五阀门c2。
145.步骤2:开启第六阀门c3。
146.步骤3:开启第七阀门d5。
147.步骤4:关闭第七阀门d5。例如,开启第七阀门d5的持续时间达到10s 后,关闭第七阀门d5。
148.步骤5:关闭第六阀门c3。
149.步骤6:开启第五阀门c2。
150.在一些实现方式中,可以将步骤3到步骤4循环执行多次,例如将步骤3到步骤4循环执行3次。
151.本实施例中,通过控制该第五阀门c2、该第六阀门c3以及该第七阀门 d5的状态,利用该氢气发生器产生的氢气对该进气管道至少清洗一次。
152.图8是本技术实施例提供的控制图1所示的高精度充氢控制装置的计量室e1进行充氢的方法的示例。
153.如图8所示,控制图1所示的高精度充氢控制装置的计量室e1进行充氢的方法可包括以下步骤:
154.步骤1:关闭第一阀门d4。
155.步骤2:开启第二阀门d2。
156.步骤3:开启控制阀门d3。
157.步骤4:关闭控制阀门d3。例如,直至计量室e1的压强等于最大压强或触发压强后,关闭控制阀门d3。
158.步骤5:关闭第二阀门d2。
159.本实施例中,通过控制该第一阀门d4、该控制阀门d3以及该第二阀门d2的状态,利用可实现该氢气发生器产生的氢气定量输入到该计量室e1内,即对真空室e2进行充氢。
160.图9是本技术实施例提供的控制图1所示的高精度充氢控制装置的待吸氢材料吸氢的方法的示例。
161.如图9所示,控制图1所示的高精度充氢控制装置的待吸氢材料吸氢的方法可包括以下步骤:
162.步骤1:关闭第四阀门c1。
163.步骤2:开启第一阀门d4。
164.步骤3:关闭第四阀门c1。
165.步骤4:开启第四阀门c1。例如,直至真空室e2的压强等于最终压强后,关闭控制阀门d3。例如,最终压强为10-1
mbar。
166.步骤5:关闭第四阀门c1。
167.本实施例中,通过控制该第一阀门d4、该第四阀门c1的状态,使得待吸氢材料对该真空室e2中的氢气进行吸收。
168.图10是本技术实施例提供的控制图1所示的高精度充氢控制装置关停的方法的示例。
169.如图10所示,控制图1所示的高精度充氢控制装置关停的方法可包括以下步骤:
170.步骤1:关闭分子真空泵p2。
171.步骤2:关闭第五阀门c2。例如,直至分子真空泵p2的w为0时,关闭第五阀门c2。
172.步骤3:关闭机械真空泵p1。
173.本实施例中,通过控制该分子真空泵p2、该第五阀门c2以及机械真空泵p1的状态,可关停高精度充氢控制装置。
174.图11是本技术实施例提供的控制图1所示的高精度充氢控制装置进气的方法的示例。
175.如图11所示,控制图1所示的高精度充氢控制装置进气的方法可包括以下步骤:
176.步骤1:开启第三阀门d1。
177.步骤2:开启第二阀门d2。
178.步骤3:开启控制阀门d3。
179.步骤4:关闭第三阀门d1。例如,直至达到大气压时,关闭第三阀门d1。
180.步骤5:关闭第二阀门d2。
181.步骤6:关闭控制阀门d3。
182.本实施例中,通过控制第三阀门d1、第二阀门d2以及控制阀门d3的状态,可对计量室e1进行充氢。
183.以上结合附图详细描述了本技术的优选实施方式,但是,本技术并不限于上述实施方式中的具体细节,在本技术的技术构思范围内,可以对本技术的技术方案进行多种简单变型,这些简单变型均属于本技术的保护范围。例如,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本技术对各种可能的组合方式不再另行说明。又例如,本技术的各种不同的实施方式之间也可以进行任意组合,只要其不违背本技术的思想,其同样应当视为本技术所公开的内容。
184.需要说明的是,在本技术的各种方法实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
185.上文对本技术实施例提供的充氢控制方法进行了说明,下面对本技术实施例提供的控制高精度充氢控制装置的装置进行说明。
186.图12是本技术实施例提供的充氢控制设备300的示意性框图。例如,该设备300可用于控制图1所示的高精度充氢控制装置,即该高精度充氢控制装置包括氢气发生器、计量室e1、真空室e2以及管式炉;该氢气发生器用于产生氢气;该氢气发生器通过控制阀门d3连接至该计量室e1,该计量室 e1的空间小于该真空室e2的空间;该计量室e1通过第一阀门d4连接至该真空室e2;该真空室e2的一端设置有容纳管道,该容纳管道用于容纳待吸氢材料,该容纳管道和该真空室e2之间形成有过渡腔;该管式炉包括炉盖和底座,该炉盖和该底座中间可形成有用于包覆该容纳管道的管状空间,该容纳管道设置在该管状空间的内部,该管式炉用于对该容纳管道进行加热,以构建温度大于预设阈值的充氢环境;为便于理解,下面以该设备300控制图 1所示的高精度充氢控制装置为例对本技术提供的设备300进行说明。
187.如图12所示,该设备300可包括:
188.第一控制单元310,用于通过控制该控制阀门d3的状态,使得该计量室 e1从该该氢气发生器获取预设量的氢气;
189.第二控制单元320,用于开启该第一阀门d4,使得该计量室e1的氢气输入至该真空
室e2,以便该待吸氢材料在充氢环境下吸收氢气。
190.在一些实施例中,该高精度充氢控制装置还包括第一传感器s1,该第一传感器s1与该计量室e1连接;
191.其中,该第一控制单元310具体用于:
192.基于该待吸氢材料吸氢后该真空室e2和该计量室e1所形成的空间的最终压强、该待吸氢材料的质量和该待吸氢材料的吸氢量,确定该计量室e1的最大压强;
193.基于该最大压强,通过控制该控制阀门d3的状态,使得该计量室e1从该氢气发生器获取预设量的氢气。
194.在一些实施例中,该第一控制单元310具体用于:
195.基于以下公式确定该最大压强:
196.pi=(p
e-ms*c
t
/k)/λ;
197.其中,pi表示该最大压强,pe表示该最终压强,ms表示该待吸氢材料的质量,c
t
表示该待吸氢材料的吸氢量,k表示比例因子,λ表示该真空室e2 和该计量室e1所形成的空间的压强和该计量室e1的压强的比值。
198.在一些实施例中,该第一控制单元310具体用于:
199.在该第一传感器s1检测到的该计量室e1的压强等于最大压强时,关闭该控制阀门d3。
200.在一些实施例中,该第一控制单元310具体用于:
201.基于该最大压强,确定该待吸氢材料吸收氢气前该真空室e2和该计量室 e1所形成的空间的初始压强;
202.在该初始压强和该最终压强之间的压降大于或等于预设阈值时,将该压降划分为多个压降;
203.确定多个压降分别对应的多个触发压强,该多个触发压强分别对应多次充氢过程;
204.针对该多次充氢过程中的每一次充氢过程,在该第一传感器s1测量的压强达到该充氢过程对应的触发压强的情况下,关闭该控制阀门d3。
205.在一些实施例中,该高精度充氢控制装置还包括第二传感器s2,该第二传感器s2与该真空室e2连接,该第二传感器s2的感测精度大于该第一传感器s1的感测精度;
206.其中,该第一控制单元310具体用于:
207.在开启该控制阀门d3和该第一阀门d4的情况下,获取该第二传感器s2 的检测到的压强;
208.在该第二传感器s2检测到的压强小于或等于预设压强的情况下,关闭该第一阀门d4并开启该控制阀门d3,直至该计量室e1从该该氢气发生器获取预设量的氢气时关闭该控制阀门d3。
209.在一些实施例中,该高精度充氢控制装置还包括进气管道,该进气管道的一端通过第二阀门d2连接至该控制阀门d3的一端,该控制阀门d3的另一端连接至该计量室e1,该进气管道的另一端通过第三阀门d1连接至该氢气发生器;
210.其中,该第一控制单元310具体用于:
211.开启该第二阀门d2和该控制阀门d3,直至该计量室e1从该该氢气发生器获取预设
量的氢气时关闭该第二阀门d2和该控制阀门d3。
212.在一些实施例中,该高精度充氢控制装置还包括分子真空泵p2和机械真空泵p1;该分子真空泵p2通过第四阀门c1连接至该真空室e2,该机械真空泵p1还通过第五阀门c2连接至该分子真空泵p2,该机械真空泵p1通过第六阀门c3连接至第七阀门d5的一端,该第七阀门d5的另一端连接至该进气管道;
213.其中,通过控制该控制阀门d3的状态,使得该计量室e1从该该氢气发生器获取预设量的氢气之前,该第一控制单元310还用于:
214.通过控制该控制阀门d3、该第一阀门d4、该第二阀门d2、该第四阀门 c1、该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,利用该氢气发生器产生的氢气对该高精度充氢控制装置至少清洗一次;
215.通过控制该第五阀门c2、该第六阀门c3以及该第七阀门d5的状态,利用该氢气发生器产生的氢气对该进气管道至少清洗一次。
216.应理解,设备实施例与方法实施例可以相互对应,类似的描述可以参照方法实施例。为避免重复,此处不再赘述。具体地,设备300可以对应于执行本技术实施例的方法200中的相应主体,并且设备300中的各个单元分别为了实现方法200中的相应流程,为了简洁,在此不再赘述。
217.还应当理解,本技术实施例涉及的设备300中的各个单元可以分别或全部合并为一个或若干个另外的单元来构成,或者其中的某个(些)单元还可以再拆分为功能上更小的多个单元来构成,这可以实现同样的操作,而不影响本技术的实施例的技术效果的实现。上述单元是基于逻辑功能划分的,在实际应用中,一个单元的功能也可以由多个单元来实现,或者多个单元的功能由一个单元实现。在本技术的其它实施例中,该设备300也可以包括其它单元,在实际应用中,这些功能也可以由其它单元协助实现,并且可以由多个单元协作实现。根据本技术的另一个实施例,可以通过在包括例如中央处理单元(cpu)、随机存取存储介质(ram)、只读存储介质(rom)等处理元件和存储元件的通用计算机的通用计算设备上运行能够执行相应方法所涉及的各步骤的计算机程序(包括程序代码),来构造本技术实施例涉及的设备300,以及来实现本技术实施例的充氢控制方法。计算机程序可以记载于例如计算机可读存储介质上,并通过计算机可读存储介质装载于电子设备中,并在其中运行,来实现本技术实施例的相应方法。
218.换言之,上文涉及的单元可以通过硬件形式实现,也可以通过软件形式的指令实现,还可以通过软硬件结合的形式实现。具体地,本技术实施例中的方法实施例的各步骤可以通过处理器中的硬件的集成逻辑电路和/或软件形式的指令完成,结合本技术实施例公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件组合执行完成。可选地,软件可以位于随机存储器,闪存、只读存储器、可编程只读存储器、电可擦写可编程存储器、寄存器等本领域的成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法实施例中的步骤。
219.图13是本技术实施例提供的电子设备400的示意结构图。
220.如图13所示,该电子设备400至少包括处理器410以及计算机可读存储介质420。其中,处理器410以及计算机可读存储介质420可通过总线或者其它方式连接。计算机可读存储介质420用于存储计算机程序421,计算机程序421包括计算机指令,处理器410用于执行
计算机可读存储介质420存储的计算机指令。处理器410是电子设备400的计算核心以及控制核心,其适于实现一条或多条计算机指令,具体适于加载并执行一条或多条计算机指令从而实现相应方法流程或相应功能。
221.作为示例,处理器410也可称为中央处理器(centralprocessingunit,cpu)。处理器410可以包括但不限于:通用处理器、数字信号处理器(digitalsignalprocessor,dsp)、专用集成电路(applicationspecificintegratedcircuit,asic)、现场可编程门阵列(fieldprogrammablegatearray,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等等。
222.作为示例,计算机可读存储介质420可以是高速ram存储器,也可以是非不稳定的存储器(non-volatilememory),例如至少一个磁盘存储器;可选的,还可以是至少一个位于远离前述处理器410的计算机可读存储介质。具体而言,计算机可读存储介质420包括但不限于:易失性存储器和/或非易失性存储器。其中,非易失性存储器可以是只读存储器(read-onlymemory,rom)、可编程只读存储器(programmablerom,prom)、可擦除可编程只读存储器(erasableprom,eprom)、电可擦除可编程只读存储器(electricallyeprom,eeprom)或闪存。易失性存储器可以是随机存取存储器(randomaccessmemory,ram),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的ram可用,例如静态随机存取存储器(staticram,sram)、动态随机存取存储器(dynamicram,dram)、同步动态随机存取存储器(synchronousdram,sdram)、双倍数据速率同步动态随机存取存储器(doubledataratesdram,ddrsdram)、增强型同步动态随机存取存储器(enhancedsdram,esdram)、同步连接动态随机存取存储器(synchlinkdram,sldram)和直接内存总线随机存取存储器(directrambusram,drram)。
223.如图13所示,该电子设备400还可以包括收发器430。
224.其中,处理器410可以控制该收发器430与其他设备进行通信,具体地,可以向其他设备发送信息或数据,或接收其他设备发送的信息或数据。收发器430可以包括发射机和接收机。收发器430还可以进一步包括天线,天线的数量可以为一个或多个。
225.应当理解,该通信设备400中的各个组件通过总线系统相连,其中,总线系统除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。
226.在一种实现方式中,该电子设备400可以是任一具有数据处理能力的电子设备;该计算机可读存储介质420中存储有第一计算机指令;由处理器410加载并执行计算机可读存储介质420中存放的第一计算机指令,以实现图1所示方法实施例中的相应步骤;具体实现中,计算机可读存储介质420中的第一计算机指令由处理器410加载并执行相应步骤,为避免重复,此处不再赘述。
227.根据本技术的另一方面,本技术实施例还提供了一种计算机可读存储介质(memory),计算机可读存储介质是电子设备400中的记忆设备,用于存放程序和数据。例如,计算机可读存储介质420。可以理解的是,此处的计算机可读存储介质420既可以包括电子设备400中的内置存储介质,当然也可以包括电子设备400所支持的扩展存储介质。计算机可读存储介质提供存储空间,该存储空间存储了电子设备400的操作系统。并且,在该存储空间中还存放了适于被处理器410加载并执行的一条或多条的计算机指令,这些计算机指令可以是一个或多个的计算机程序421(包括程序代码)。
228.根据本技术的另一方面,本技术实施例还提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。例如,计算机程序421。此时,数据处理设备400可以是计算机,处理器410从计算机可读存储介质420读取该计算机指令,处理器410执行该计算机指令,使得该计算机执行上述各种可选方式中提供的充氢控制方法。
229.换言之,当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。该计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行该计算机程序指令时,全部或部分地运行本技术实施例的流程或实现本技术实施例的功能。该计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。该计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质进行传输,例如,该计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(digital subscriber line,dsl))或无线 (例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。
230.本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元以及流程步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。
231.最后需要说明的是,以上内容,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。