1.本实用新型涉及转向装置技术领域,具体涉及一种智能代步车跟踪转向装置。
背景技术:
2.代步车又叫懒人车,是指以代步为目的的交通工具和辅助工具,在国内有时候可以指代步的汽车、电动自行车、电动代步车、两轮自动平衡代步车、独轮平衡代步车。
3.现有技术中,代步车一般通过前轮或者后轮转向实现转动。但是在一些道路情况下行驶和转向都较为困难。同时大多数的代步车缺乏缓冲减震结构,因此在不舒适的道路上会对转向结构造成一定的影响甚至使得转向机构损坏。
技术实现要素:
4.本实用新型的目的是为了解决现有技术的缺点,而提出了一种智能代步车跟踪转向装置。
5.本实用新型提供了如下的技术方案:
6.一种智能代步车跟踪转向装置,包括底板,所述底板底部设有缓冲机构,所述缓冲机构底部设有固定旋转连接块,所述固定旋转连接块通过连接转轴与转动旋转连接块连接;
7.所述转动旋转连接块设有两个,一个所述转动旋转连接块端部设有驱动车轮且承载设有驱动转轴,所述驱动转轴旁设有驱动电机,所述驱动电机和所述驱动转轴均设有驱动齿轮且所述驱动齿轮啮合;
8.另一个所述转动旋转连接块承载设有传动车轮,所述传动车轮通过安装轴固定安装,所述传动车轮内端设有转动环,所述转动环与传动齿轮连接,所述传动齿轮旁设有转向驱动轮且所述转向驱动轮套接在转向电机上,所述转向驱动轮与所述传动齿轮啮合,所述传动齿轮套接有链条。
9.优选的,所述缓冲机构在所述底板底部设有固定连接块,所述固定连接块连接连杆,所述连杆连接滑动连接块,所述滑动连接块套接在滑杆上,所述滑杆设在减震板上,所述固定旋转连接块设在所述减震板底部。
10.优选的,所述转动环为弧形齿条且齿设在所述转动环外圈,所述转动环与所述传动齿轮啮合。
11.优选的,所述传动齿轮为两段式结构,所述传动齿轮的上段直径小于所述传动齿轮的下段直径。
12.优选的,所述转动旋转连接块绕所述连接转轴旋转。
13.优选的,所述底板设有定位模块、信号收发模块和控制处理模块。
14.本实用新型的有益效果是:
15.传动车轮和驱动车轮受道路影响会对底板产生作用力,作用力通过连杆挤压滑动连接块,使得滑动连接块沿着滑杆滑动,缓冲弹簧的弹力降低作用力甚至抵消;
16.转向的传动车轮设在转动旋转连接块块上,便于传动车轮的转向。
附图说明
17.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
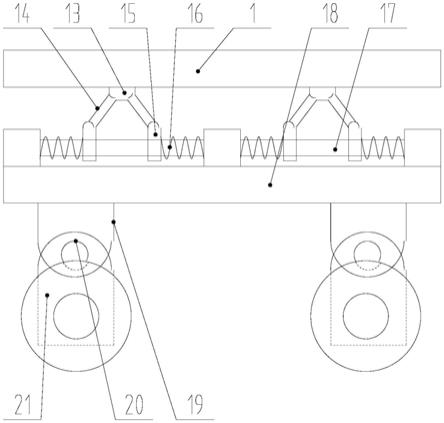
18.图1为本实用新型结构示意图之一;
19.图2为本实用新型结构示意图之二;
20.图中标记为:1-底板,2-驱动车轮,3-驱动转轴,4-驱动齿轮,5-驱动电机,6-传动车轮,7-安装轴,8-转动环,9-传动齿轮,10-转向传动轮,11-转向驱动轮,12-转向电机,13-固定连接块,14-连杆,15-滑动连接块,16-缓冲弹簧,17-滑杆,18-减震板,19-固定旋转连接块,20-连接转轴,21-转动旋转连接块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。
22.根据图1和图2所示,一种智能代步车跟踪转向装置包括底板1,底板1底部设有缓冲机构,缓冲机构底部设有固定旋转连接块19,固定旋转连接块19通过连接转轴20与转动旋转连接块21连接;
23.转动旋转连接块21设有两个,一个转动旋转连接块21端部设有驱动车轮2且承载设有驱动转轴3,驱动转轴3旁设有驱动电机5,驱动电机5和驱动转轴3均设有驱动齿轮4且驱动齿轮4啮合;
24.另一个转动旋转连接块21承载设有传动车轮6,传动车轮6通过安装轴7固定安装,传动车轮6内端设有转动环8,转动环8与传动齿轮9连接,传动齿轮9旁设有转向驱动轮11且转向驱动轮11套接在转向电机12上,转向驱动轮11与传动齿轮9啮合,传动齿轮9套接有链条。
25.缓冲机构在底板1底部设有固定连接块13,固定连接块13连接连杆14,连杆14连接滑动连接块15,滑动连接块15套接在滑杆17上,滑杆17设在减震板18上,固定旋转连接块19设在减震板18底部。转动环8为弧形齿条且齿设在转动环8外圈,转动环8与传动齿轮9啮合。
26.工作原理:当代步车选定行驶路线,定位模块将代步车进行定位,根据信号收发模块进行转向控制。转向电机12通电带动转向驱动轮11转动,转向驱动轮11带动啮合的传动齿轮9转动,传动齿轮9带动转向环8绕安装轴7转动,进而使得传动车轮6转动。
27.当代步车在路面不平的状况下行驶,传动车轮6和驱动车轮2通过转动旋转连接块21、连接转轴20和固定旋转连接块19上顶减震板18。在减震板18上升时,固定连接块13通过连杆14挤压滑动连接块15,滑动连接块15沿着滑杆17滑动并挤压缓冲弹簧16,缓冲弹簧16受挤压后产生弹力作用于滑动连接块15,进而减小甚至抵消作用力,达到减震效果。
28.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡
在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种智能代步车跟踪转向装置,其特征在于,包括底板,所述底板底部设有缓冲机构,所述缓冲机构底部设有固定旋转连接块,所述固定旋转连接块通过连接转轴与转动旋转连接块连接;所述转动旋转连接块设有两个,一个所述转动旋转连接块端部设有驱动车轮且承载设有驱动转轴,所述驱动转轴旁设有驱动电机,所述驱动电机和所述驱动转轴均设有驱动齿轮且所述驱动齿轮啮合;另一个所述转动旋转连接块承载设有传动车轮,所述传动车轮通过安装轴固定安装,所述传动车轮内端设有转动环,所述转动环与传动齿轮连接,所述传动齿轮旁设有转向驱动轮且所述转向驱动轮套接在转向电机上,所述转向驱动轮与所述传动齿轮啮合,所述传动齿轮套接有链条。2.根据权利要求1所述的一种智能代步车跟踪转向装置,其特征在于,所述缓冲机构在所述底板底部设有固定连接块,所述固定连接块连接连杆,所述连杆连接滑动连接块,所述滑动连接块套接在滑杆上,所述滑杆设在减震板上,所述固定旋转连接块设在所述减震板底部。3.根据权利要求1所述的一种智能代步车跟踪转向装置,其特征在于,所述转动环为弧形齿条且齿设在所述转动环外圈,所述转动环与所述传动齿轮啮合。4.根据权利要求3所述的一种智能代步车跟踪转向装置,其特征在于,所述传动齿轮为两段式结构,所述传动齿轮的上段直径小于所述传动齿轮的下段直径。5.根据权利要求1所述的一种智能代步车跟踪转向装置,其特征在于,所述转动旋转连接块绕所述连接转轴旋转。6.根据权利要求1所述的一种智能代步车跟踪转向装置,其特征在于,所述底板设有定位模块、信号收发模块和控制处理模块。
技术总结
一种智能代步车跟踪转向装置,底板底部设有缓冲机构,缓冲机构底部设有固定旋转连接块,固定旋转连接块通过连接转轴与转动旋转连接块连接,转动旋转连接块设有两个,一个转动旋转连接块端部设有驱动车轮且承载设有驱动转轴,驱动转轴旁设有驱动电机,驱动电机和驱动转轴均设有驱动齿轮且驱动齿轮啮合;另一个转动旋转连接块承载设有传动车轮,传动车轮通过安装轴固定安装,传动车轮内端设有转动环,转动环与传动齿轮连接,传动齿轮旁的转向驱动轮且转向驱动轮套接在转向电机上,转向驱动轮与传动齿轮啮合,传动齿轮套接有链条。本实用新型通过将可转向的传动车轮设在转动旋转连接块块上,便于传动车轮的转向,缓冲机构降低道路对转向结构的影响。道路对转向结构的影响。道路对转向结构的影响。
技术研发人员:孙玉铤 陈锋
受保护的技术使用者:蓝石新动力(常熟)有限公司
技术研发日:2021.06.23
技术公布日:2022/2/7