用于双臂悬架和轮内转向的装置和方法
发明领域
1.本发明涉及悬架系统领域,且更具体地涉及拖曳臂式悬架系统或导向臂式悬架系统(trailing or leading arm suspension systems)。
2.发明背景
3.典型地,用于交通工具(vehicle)的拖曳臂式悬架系统具有连接在交通工具的车桥与底盘上的枢转点之间的悬架臂。与其他悬架系统(例如,双横臂悬架系统、等等)不同,拖曳臂式悬架系统的悬架臂通常沿着交通工具的大致纵向方向对齐,使得其枢转轴线横向于交通工具纵向中心线。典型地,为了使车桥能够做基本上线性的(linear)竖直运动,拖曳臂式悬架系统的悬架臂被设置在车轮的轮辋的外部。然而,这种拖曳臂式悬架系统可能会占据交通工具底盘中相当大的空间。在一些悬架系统中,悬架臂是拖曳臂,其中车桥沿着交通工具前后轴线位于悬架臂的后面。在其他悬架系统中,悬架臂是导向臂,其中车桥沿着交通工具前后轴线位于悬架臂的前面。
4.发明概述
5.本发明的一些实施例提供了一种用于交通工具的车轮的悬架系统,包括:车轮对接器(wheel interface),其具有车轮对接器轴线,该车轮对接器轴线是车轮连接至车轮对接器时绕其旋转的轴线;第一臂,其连接至车轮对接器并且可相对于车轮对接器围绕基本平行于车轮对接器轴线的第一轴线旋转;和第二臂,其连接至车轮对接器并且可相对于车轮对接器围绕基本平行于车轮对接器轴线的第二轴线旋转;以及阻尼和弹性装置,其被设置在形成于第一臂与第二臂之间的间隙内,该阻尼和弹性装置在其端部中的一个端部处连接至第一臂、第二臂和车轮对接器中的至少一个;其中悬架系统的至少一部分被设置在车轮的轮辋内。
6.在一些实施例中,悬架系统包括副车架(sub-frame),以将悬架系统的至少一部分连接至交通工具的参考车架,其中第一臂和第二臂连接至副车架,并且可相对于副车架分别绕第三轴线和第四轴线旋转,该第三轴线和该第四轴线基本平行于车轮对接器轴线。
7.在一些实施例中,阻尼和弹性装置连接在第一臂和第二臂中的一个与副车架之间。
8.在一些实施例中,第一臂和第二臂在它们各自的第一端部处连接至车轮对接器,并且在它们各自的第二端部处连接至副车架。
9.在一些实施例中,第一臂、第二臂和车轮对接器的尺寸被确定并且第一轴线、第二轴线、第三轴线和第四轴线的位置被设置成形成悬架系统的基本平行四边形的形状。
10.在一些实施例中,第一臂和第二臂可相对于副车架围绕转向轴线旋转。
11.在一些实施例中,转向轴线基本垂直于车轮对接器轴线。
12.在一些实施例中,转向轴线相对于垂直于车轮对接器轴线的轴线是倾斜的。
13.在一些实施例中,悬架系统包括连接至第一臂和第二臂中的至少一个的转向臂。
14.在一些实施例中,转向臂在其第一端部处连接至第一臂和第二臂中的至少一个,并且在其第二端部处可连接至转向杆,其中转向杆可由一个或更多个转向致动器控制。
15.在一些实施例中,悬架系统包括连接至第一臂的转向臂,第一臂利用接头单元连接至副车架,该接头单元包括第一直的枢转件和第二直的枢转件,第一直的枢转件具有与第三轴线重合的轴线,第二直的枢转件具有与转向轴线重合的轴线,并且第二臂利用球形接头和万向接头中的一个连接至副车架。
16.在一些实施例中,阻尼和弹性装置连接在车轮对接器和副车架中的一个与所述第二臂之间。
17.在一些实施例中,阻尼和弹性装置具有相对于转向轴线倾斜的线性运动轴线。
18.在一些实施例中,车轮对接器被成形为提供正外倾角和负外倾角之一。
19.在一些实施例中,第一臂和第二臂中的至少一个沿着其纵向尺寸是弯曲的。
20.在一些实施例中,第一臂和第二臂中的至少一个具有臂孔,并且其中阻尼和弹性装置的至少一部分可在其臂孔内运动。
21.在一些实施例中,臂孔位于相应的臂的端部中的一个端部处。
22.在一些实施例中,第三轴线和第四轴线沿着可与交通工具纵向轴线对齐的轴线位于车轮对接器轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
23.在一些实施例中,第三轴线和第四轴线沿着可与交通工具纵向轴线对齐的轴线位于第一轴线和第二轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
24.在一些实施例中,第一轴线和第二轴线沿着可与交通工具纵向轴线对齐的轴线位于车轮对接器轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
25.在一些实施例中,第一轴线和第二轴线沿着可与交通工具纵向轴线对齐的轴线位于第三轴线和第四轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
26.本发明的一些实施例提供了一种用于交通工具的车轮的悬架系统,包括:车轮对接器,其具有车轮对接器轴线,该车轮对接器轴线是车轮连接至车轮对接器时绕其旋转的轴线;副车架,其用于将悬架系统的至少一部分连接至交通工具的参考车架;以及第一臂和第二臂,该第一臂和该第二臂连接至车轮对接器并且可相对于车轮对接器分别围绕第一轴线和第二轴线旋转,该第一轴线和该第二轴线基本平行于车轮对接器轴线,第一臂和第二臂连接至副车架并且可相对于副车架分别围绕第三轴线和第四轴线旋转,该第三轴线和该第四轴线基本平行于车轮对接器轴线,并且第一臂和第二臂可围绕转向轴线旋转。
27.在一些实施例中,转向轴线基本垂直于车轮对接器轴线。
28.在一些实施例中,转向轴线相对于垂直于车轮对接器轴线的轴线是倾斜的。
29.在一些实施例中,悬架系统包括被设置在形成于第一臂与第二臂之间的间隙内的阻尼和弹性装置,该阻尼和弹性装置连接在如下项之一之间:第一臂与第二臂之间、第一臂和第二臂中的一个与车轮对接器之间、以及第一臂和第二臂中的一个与副车架之间。
30.在一些实施例中,阻尼和弹性装置具有相对于转向轴线倾斜的线性运动轴线。
31.在一些实施例中,第一臂和第二臂在它们各自的第一端部处连接至车轮对接器,并且在它们各自的第二端部处连接至副车架。
32.在一些实施例中,第一臂、第二臂和车轮对接器的尺寸被确定并且第一轴线、第二轴线、第三轴线和第四轴线的位置被设置成形成悬架系统的基本平行四边形的形状。
33.在一些实施例中,悬架系统包括转向臂,该转向臂在其第一端部处连接至第一臂和第二臂中的至少一个,并且可在其第二端部处经由转向杆连接至一个或更多个转向致动
器。
34.在一些实施例中,转向臂连接至第一臂,第一臂利用接头单元连接至副车架,该接头单元包括第一直的枢转件和第二直的枢转件,第一直的枢转件具有与第三轴线重合的轴线,第二直的枢转件具有与转向轴线重合的轴线,并且第二臂利用球形接头和万向接头中的一个连接至副车架。
35.在一些实施例中,阻尼和弹性装置连接在车轮对接器和副车架中的一个与所述第二臂之间。
36.在一些实施例中,车轮对接器被成形为提供正外倾角和负外倾角之一。
37.在一些实施例中,第一臂和第二臂中的至少一个沿着其纵向尺寸是弯曲的。
38.在一些实施例中,第一臂和第二臂中的至少一个具有臂孔,并且其中阻尼和弹性装置的至少一部分可在其臂孔内运动。
39.在一些实施例中,臂孔位于相应的臂的端部中的一个端部处。
40.在一些实施例中,第三轴线和第四轴线沿着可与交通工具纵向轴线对齐的轴线位于车轮对接器轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
41.在一些实施例中,第三轴线和第四轴线沿着可与交通工具纵向轴线对齐的轴线位于第一轴线和第二轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
42.在一些实施例中,第一轴线和第二轴线沿着可与交通工具纵向轴线对齐的轴线位于车轮对接器轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
43.在一些实施例中,第一轴线和第二轴线沿着可与交通工具纵向轴线对齐的轴线位于第三轴线和第四轴线的前面,交通工具纵向轴线从交通工具的后端向前端延伸。
44.本发明的一些实施例提供了一种交通工具,其包括两个或更多个如本文所述的悬架系统。
45.本发明的这些、另外的和/或其他方面和/或优点在下面的详细描述中阐述;可能从详细描述中推断出来;和/或可通过实施本发明而习得。
46.附图简述
47.为了更好地理解本发明的实施例并示出如何可实现本发明的实施例,现在将纯粹通过示例的方式参考附图,在附图中相同的数字始终指示相对应的元件或区段。
48.在附图中:
49.图1a、图1b、图1c、图1d、图1e、图1f和图1g是根据本发明的一些实施例的悬架系统的示意图;
50.图1h、图1i、图1j和图1k是根据本发明的一些实施例的悬架系统和装配到悬架系统中的车轮的示意图;
51.图2a是根据本发明的一些实施例的包括副车架的悬架系统和装配到悬架系统中的车轮的示意图;
52.图2b和图2c是根据本发明的一些实施例的包括副车架的悬架系统的示意图;
53.图3a、图3b和图3c是根据本发明的一些实施例的包括转向组件的悬架系统的示意图;
54.图4a和图4b是根据本发明的一些实施例的悬架系统的一个实施例的示意图;并且
55.图4c和图4d是根据本发明的一些实施例的悬架系统和装配在悬架系统内的车轮
的一个实施例的示意图。
56.应当理解,为了图示的简单和清楚起见,附图中所示的元件不一定按比例绘制。例如,为了清楚,元件中的一些的尺寸可能相对于其他元件被放大。此外,在认为适当的情况下,参考标记可能在附图之间重复以指示相应的或类似的元件。
57.发明的详细描述
58.在以下描述中,描述了本发明的各个方面。出于解释的目的,阐述了具体配置和细节以便提供对本发明的透彻理解。然而,对于本领域技术人员来说明显的是,本发明可以在没有本文给出的具体细节的情况下实施。此外,为了不使本发明模糊,公知的特征可能已经被省略或简化。具体参考附图,要强调的是,所示的细节仅为示例性的,并且仅出于对本发明的说明性讨论的目的,并且陈述是为了提供被认为最有用且易于理解本发明的原理和概念方面的描述。在这方面,未试图以超过对本发明的基本理解所必需的细节来更详细地示出本发明的结构细节,通过附图进行的描述使得如何可以在实践中实施本发明的若干形式对于本领域技术人员而言是明显的。
59.在详细解释本发明的至少一个实施例之前,应当理解的是本发明的应用不限于以下描述中阐述的或附图中示出的构造的细节和部件的布置。本发明适用于可以以各种方式实施或实现的其他实施例以及所公开实施例的组合。同样,应当理解,本文采用的措词和术语是出于描述的目的,而不应被认为具有限制性。
60.在下面的描述中,观察方向“前面”涉及从交通工具前方观察的方向,下面描述的悬架系统可以附接至该交通工具。观察方向“侧面”、“上面”、“下面”或“后面”分别与“前面”的观察方向相关。类似地,下文中使用的术语“竖直”是指垂直于装配有下文所描述的悬架系统的交通工具所处的平面的表面的方向。
61.现在参考图1a、图1b、图1c、图1d、图1e、图1f和图1g,它们是根据本发明的一些实施例的悬架系统100的示意图。
62.还参考图1h、图1i、图1j和图1k,它们是根据本发明的一些实施例的悬架系统100和装配到悬架系统100中的车轮90的示意图。
63.图1a示出了根据本发明的一些实施例的悬架系统100的前视图。图1b、图1d、图1e和图1c示出了根据本发明的一些实施例的悬架系统100的相对的侧视图。图1f和图1g分别示出了根据本发明的一些实施例的悬架系统100的俯视图和仰视图。图1h、图1j和图1k示出了根据本发明的一些实施例的悬架系统100和装配到其上的车轮90的前视图。图1i示出了根据本发明一些实施例的悬架系统100和装配到其上的车轮90的俯视图。
64.根据本发明的一些实施例,悬架系统100包括车轮对接器110和悬架组件120(例如,如图1a-1i所示)。
65.车轮对接器110可以使车轮90能够连接到其上,并且可以具有车轮对接器轴线111,车轮对接器轴线111是车轮90在附接至车轮对接器110时可以绕其旋转的轴线。车轮对接器110可以是由例如钢、铝和复合材料制成的结构元件。车轮对接器110可以例如包括车轮转向节、车轮立柱、车轮轮毂、车轮支承件、等等。
66.根据本发明的一些实施例,悬架组件120包括第一臂121和第二臂122。例如,第一臂121和第二臂122可以是由例如钢、铝和复合材料制成的长形的结构元件。第一臂121可以连接至车轮对接器110,并且可以相对于车轮对接器110围绕第一轴线123a旋转,第一轴线
123a可以平行于(或基本平行于)车轮对接器轴线111。在一些实施例中,第一臂121在其第一端部121a处利用第一枢转连接件123连接至车轮对接器。第二臂122可以连接至车轮对接器110,并且可以相对于车轮对接器110围绕第二轴线124a旋转,第二轴线124a可以平行于(或基本平行于)车轮对接器轴线111。在一些实施例中,第二臂122在其第一端部122a处利用第二枢转连接件124连接至车轮对接器110。在各种实施例中,第一臂121和/或第二臂122平行于(或基本平行于)车轮对接器平面113,车轮对接器平面113垂直于车轮对接器轴线111。在各种实施例中,第一枢转连接件123和第二枢转连接件124中的每一个都可以是直的枢转件(例如,支承件或旋转接头)或球形接头。
67.车轮对接器110可以具有不同的形状。在图1a-1k所示的实施例中,车轮对接器110包括在第一轴线123a与第二轴线124a之间延伸的第一车轮对接器部分110a,以及垂直于第一车轮对接器部分110a并且从第一车轮对接器部分110a朝向车轮对接器轴线111延伸的第二车轮对接器部分110b。
68.在一些实施例中,车轮对接器轴线111沿着轴线101位于第一轴线123a和第二轴线124a的前面,轴线101可以与从交通工具的后端向前端延伸的交通工具纵向轴线对齐(例如,悬架系统100的拖曳臂式构造;如图1b-1g所示)。
69.在一些实施例中,第一轴线123a和第二轴线124a沿着轴线101位于车轮对接器轴线111的前面(例如,悬架系统100的导向臂式构造)。
70.根据本发明的一些实施例,悬架系统100包括阻尼和弹性装置128。阻尼和弹性装置128可以限制运动,并且可以沿着(或基本上沿着)交通工具的竖直轴线支撑交通工具的重量(例如,当车轮90装配到悬架系统100中时)。阻尼和弹性装置128可以例如包括弹簧阻尼器,该弹簧阻尼器被构造为螺旋减振器或螺旋冲击吸收器。弹簧阻尼器例如可以是线性的、旋转的空气弹簧、和/或电子/电磁的阻尼器。
71.阻尼和弹性装置128可以(例如,在其第一端部128a与第二端部128b之间)连接在例如第一臂121与第二臂122之间(例如,如图1b和图1c所示)。在另一示例中,阻尼和弹性装置128可以连接在臂121、122中的一个与车轮对接器110之间(例如,如图1d和图1e所示)。在另一示例中,阻尼和弹性装置128可以连接在臂121、122中的一个与悬架系统100的副车架(例如,下面参考图2a、图2b和图2c描述的副车架105)之间。在另一示例中,阻尼和弹性装置128可以连接在臂121、122中的一个与交通工具的参考车架(例如底盘)或副车架(例如下面参考图2a、图2b和图2c描述的副车架105)之间。
72.在一些实施例中,悬架系统100的至少一部分被设置在车轮90的轮辋92内。例如,当车轮90被装配到悬架系统100中时,悬架系统100的至少一部分被设置在车轮90的轮辋92内(例如,如图1h和图1i所示)。例如,悬架系统100的至少25%被设置在车轮90的轮辋92的体积内。在一些实施例中,车轮对接器210的至少75%被设置在车轮90的轮辋92的体积内。在一些实施例中,臂221和222中的一个或更多个的至少75%被设置在车轮90的轮辋92的体积内。在一些实施例中,悬架系统100的长度和高度小于待被装配到悬架系统100中的车轮90的轮辋92的直径。
73.在各种实施例中,车轮对接器110被成形为给车轮90提供正外倾角114(例如,如图1j所示)或负外倾角114’(例如,如图1k所示)。在一些实施例中,外倾角114、114’是恒定的(或基本恒定的)。
74.现在参考图2a,其是根据本发明的一些实施例的包括副车架105的悬架系统100以及装配到悬架系统100中的车轮90的示意图。
75.也参考图2b和图2c,它们是根据本发明的一些实施例的包括副车架105的悬架系统100的示意图。
76.图2a示出了根据本发明的一些实施例的悬架系统100和装配到悬架系统100中的车轮90的侧视图。图2b示出了根据本发明的一些实施例的悬架系统100的俯视图。图2c示出了根据本发明的一些实施例的悬架系统100的仰视图。
77.根据本发明的一些实施例,悬架系统100包括副车架105。副车架105可以是由例如钢、铝和复合材料制成的结构元件。副车架105可以将悬架系统100的至少一部分连接至交通工具的参考车架(例如,底盘)。
78.在一些实施例中,悬架组件120连接至副车架105。第一臂121可以连接至副车架105,并且可以相对于副车架105围绕平行于(或基本平行于)车轮对接器轴线111的第三轴线125a旋转。在一些实施例中,第一臂121在其第二端部121b处利用第三枢转连接件125连接至副车架105。第二臂122可以连接至副车架105,并且可以相对于副车架105围绕平行于(或基本平行于)车轮对接器轴线111的第四轴线126a旋转。在一些实施例中,第二臂122在其第二端部122b处利用第四枢转连接件126连接。在各种实施例中,第三枢转连接件125和第四枢转连接件126中的每一个都可以是直的枢转件(例如,支承件或旋转接头)或球形接头。
79.在一些实施例中,第一臂121、第二臂122和车轮对接器110的尺寸被确定并且第一轴线123a、第二轴线124a、第三轴线125a和第四轴线126a的位置被设置成引起车轮对接器110沿着车轮对接器运动轴线112做基本线性的运动,车轮对接器运动轴线112是垂直于车轮对接器轴线111的轴线。在一些实施例中,第一臂121、第二臂122和车轮对接器110的尺寸被确定并且第一轴线123a、第二轴线124a、第三轴线125a和第四轴线126a的位置被设置成形成悬架系统100的基本平行四边形的形状。这可以例如引起车轮对接器110沿着车轮对接器运动轴线112做基本线性的运动,车轮对接器运动轴线112是垂直于车轮对接器轴线111的轴线。
80.车轮对接器运动轴线112可以平行于(或基本平行于)装配有悬架系统100的交通工具的竖直轴线72。这可以例如引起车轮对接器110沿着平行于装配有悬架系统100的交通工具的竖直轴线72的轴线做基本线性的运动。
81.在一些实施例中,例如,在没有副车架105的实施例中,悬架组件120可直接连接至交通工具的参考车架。例如,第一臂121和第二臂122可以连接至交通工具的参考车架,并且可以相对于参考车架分别围绕第三轴线123a和第四轴线124a旋转。
82.在一些实施例中,第三轴线125a和第四轴线126a沿着轴线101位于第一轴线123a和第二轴线124a的前面,轴线101可以与从交通工具的后端向前端延伸的交通工具纵向轴线对齐(例如,悬架系统100的拖曳臂式构造;如图2a所示)。在一些实施例中,第三轴线125a和第四轴线126a沿着轴线101位于车轮对接器轴线111的前面(例如,悬架系统100的拖曳臂式构造;如图2a所示)。
83.在一些实施例中,第一轴线123a和第二轴线124a沿着轴线101位于第三轴线125a和第四轴线126a的前面(例如,悬架系统100的导向臂式构造)。在一些实施例中,第一轴线
123a和第二轴线124a沿着轴线101位于车轮对接器轴线111的前面(例如,悬架系统100的导向臂式构造)。
84.在一些实施例中,悬架系统100能够与动力传动系的子系统一起操作。动力传动系的子系统可以包括旋转马达/半轴和传动轴,以将旋转马达/半轴与车轮对接器110连接。传动轴可以传递来自交通工具的动力传动系的子系统的旋转马达/半轴的扭矩力,从而当车轮90被装配到悬架系统100中时使车轮90旋转。
85.在一些实施例中,在悬架组件120的第一臂121与第二臂122之间形成间隙118。间隙118可以用于容纳交通工具的一个或更多个子系统的一个或更多个部件。例如,间隙118可以容纳动力传动系的子系统的传动轴,其中传动轴可以从交通工具的参考车架朝向车轮对接器110/车轮90延伸。在一些实施例中,阻尼和弹性装置128被设置在间隙118内。
86.在各种实施例中,第一臂121和/或第二臂122是弯曲的。与直的臂相比,弯曲的臂可以具有沿其弯曲的纵向尺寸的更长的距离。例如,与具有直的第一臂121和/或第二臂122的实施例相比,这可以引起车轮对接器110沿着车轮对接器运动轴线112行进更长的距离。与形成在直的臂之间的间隙118相比,这也可以增加弯曲的臂之间的间隙。增加的间隙可以例如为交通工具的一个或更多个子系统的一个或更多个部件提供更多的空间。
87.现在参考图3a、图3b和图3c,它们是根据本发明的一些实施例的包括转向组件130的悬架系统100的示意图。
88.图3a示出了根据本发明的一些实施例的悬架系统100的侧视图。图3b和图3c示出了根据本发明的一些实施例的针对不同的转向轴线角度135、135’的悬架系统100的后视图。
89.根据本发明的一些实施例,悬架系统100包括转向组件130。转向组件130可以具有转向轴线135。在一些实施例中,转向轴线135垂直于(或基本垂直于)车轮对接器轴线111。转向组件130可以连接至悬架组件120,并且可以引起悬架组件120和车轮对接器110围绕转向轴线135的转向旋转135a。
90.在各种实施例中,第一臂121和第二臂122可以连接至副车架/参考车架,并且可以分别围绕第三轴线125a和四个轴线126a(例如,如上文关于图2a、图2b和图2c所述)以及围绕转向轴线135旋转。注意,为了清楚起见,在图3a、图3b和图3c中未示出副车架和参考车架。
91.在一些实施例中,转向组件130包括第五枢转连接件132和第六枢转连接件134,第五枢转连接件132和第六枢转连接件134沿着转向轴线135定位。第一臂121可以例如在其第二端部121b处利用第五枢转连接件132连接至副车架/参考车架。第二臂122可以例如在其第二端部122b处利用第六枢转连接件134连接至副车架/参考车架。在各种实施例中,第五枢转连接件132和第六枢转连接件134中的每一个都包括一个或更多个直的枢转件(例如,支承件或旋转接头)、万向接头或球形接头。
92.在一些实施例中,第五枢转连接件132和第六枢转连接件134被设计成使得引起悬架组件120的部件在平行于车轮对接器平面113的平面内运动,而不会引起转向组件130的运动。例如,第五枢转连接件132和第六枢转连接件134中的每一个都可以是球形接头、由两个彼此垂直的直的枢转件组成的接头单元以及其组合之一。这种设计的一个示例在下面参考图4a和图4b进行描述。例如,与当前的悬架系统(例如,拖曳臂式悬架系统)相比,这可以
最小化悬架组件120和车轮对接器110的非预期的转向旋转(例如,颠簸转向)。
93.在一些实施例中,转向组件130具有倾斜的转向轴线135’。转向轴线135’可以相对于垂直于车轮对接器轴线111的轴线(例如,相对于装配有悬架系统100的交通工具的竖直轴线)倾斜。例如,第五枢转连接件132和第六枢转连接件134分别在第一臂121和第二臂122处的位置可以被设置成提供倾斜的转向轴线135’(例如,如图3c所示)。在一些实施例中,倾斜的转向轴线135’是恒定的(或基本恒定的)。在一些实施例中,倾斜的转向轴线135’是可调节的。例如,倾斜的轴线135’可以通过沿着平行于车轮对接器轴线111的轴线改变第五枢转连接件132与第六枢转连接件134之间的距离来调节。
94.在一些实施例中,阻尼和弹性装置128具有线性运动轴线。在一些实施例中,阻尼和弹性装置128的线性运动轴线相对于转向轴线135倾斜。
95.在一些实施例中,转向组件130包括转向臂136。转向臂136可以连接至悬架组件120。例如,转向臂136可以在其第一端部136a处连接至悬架组件120的第一臂121。转向臂136与悬架组件120的连接可以是直接的或者经由第五枢转连接件132(例如,如图3a、图3b和图3c所示)和/或经由第六枢转连接件134。
96.在一些实施例中,转向组件130由机械转向子系统操作。例如,机械转向子系统包括连接至转向臂136并且能够操作转向臂136的转向杆/推杆/系杆。
97.在一些实施例中,转向组件130由一个或更多个电动马达操作。例如,(多个)电动马达可以控制悬架组件120和转向臂136中的至少一个围绕转向轴线135的旋转运动。
98.在一些实施例中,转向组件130由线控转向子系统操作。线控转向子系统可以包括连接至悬架组件120和转向臂136中的至少一个的一个或更多个致动器。(多个)致动器可以控制悬架组件120和转向臂136中的至少一个围绕转向轴线135的旋转运动。
99.在一些实施例中,转向组件130的转向臂136连接至悬架组件120的第一臂121。这可以例如引起第一臂121承载由车轮90施加在悬架组件120上的横向载荷(例如,沿车轮对接器轴线111的方向)以及由转向臂136施加在悬架组件120上的转向载荷。这可以例如引起悬架组件120的第二臂122至少免于其转向载荷,并且承载由车轮90施加在悬架组件120上的横向载荷和竖直载荷(例如,沿着交通工具的车轮对接器运动轴线112/竖直轴线72的方向)。这可以例如引起悬架组件120的部件在平行于车轮对接器平面113的平面内运动,而不会引起转向组件130运动。
100.在一些实施例中,悬架组件120的第二臂122连接至阻尼和弹性装置128。这可以例如引起第二臂122承载由车轮90施加在悬架组件120上的横向载荷(例如,沿车轮对接器轴线111的方向)和竖直载荷(例如,沿交通工具的车轮对接器运动轴线112/竖直轴线72的方向)。这可以例如引起悬架组件120的第一臂121免于竖直载荷,因为竖直载荷可以经由车轮对接器110、第二臂122以及阻尼和弹性装置128传递,例如绕过第一臂121。
101.在一些实施例中,悬架组件120的第一臂121可以连接至阻尼和弹性装置128,并且悬架组件120的第二臂121可以连接至转向组件130的转向臂136。
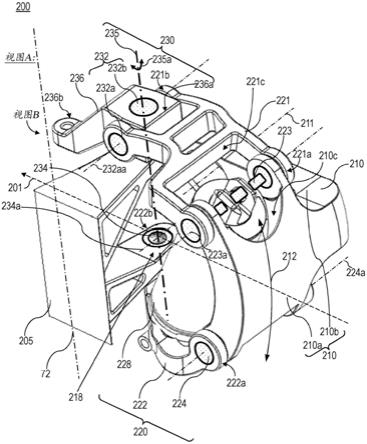
102.现在参考图4a和图4b,它们是根据本发明的一些实施例的悬架系统200的一个实施例的示意图。
103.还参考图4c和图4d,它们是根据本发明的一些实施例的悬架系统200和装配在悬架系统200内的车轮90的一个实施例的示意图。
104.图4a和图4b示出了根据本发明的一些实施例的悬架系统200的相反的全景视图。图4c和图4d示出了根据本发明的一些实施例的悬架系统200和装配在悬架系统200内的车轮90的相反的全景视图。
105.根据本发明的一些实施例,悬架系统200包括副车架205、车轮对接器210、悬架组件220、阻尼和弹性装置228以及转向组件230(例如,如图4a所示)。
106.例如,副车架205可以类似于上面参考图2a-2c描述的副车架105。车轮对接器210可以类似于例如上面参考图1a-1k、图2a-2c和图3a-3c描述的车轮对接器110。悬架组件220可以类似于例如上面参考图1a-1k、图2a-2c和图3a-3c描述的悬架组件120。阻尼和弹性装置228可以类似于例如上面参考图1a-1k、图2a-2c和图3a-3c描述的阻尼和弹性装置128。转向组件230可以类似于例如上面参考图3a-3c描述的转向组件130。
107.副车架205可以是由例如钢、铝和复合材料制成的结构元件。副车架205可以将悬架系统200的至少一部分连接至交通工具的参考车架(例如,底盘)。在一些实施例中,悬架系统200的悬架组件220连接至副车架205。
108.车轮对接器210可以使车轮90能够连接到其上,并且可以具有车轮对接器轴线211,车轮对接器轴线211是车轮90在附接至车轮对接器210时可以绕其旋转的轴线。车轮对接器210可以例如包括车轮转向节、车轮立柱和/或本领域已知的将车轮附接至悬架系统的其他的附接机构。
109.在一些实施例中,悬架组件220包括第一臂221和第二臂222。例如,第一臂221和第二臂222可以分别类似于上文参考图1a-1k描述的第一臂121和第二臂122。
110.第一臂221可以连接至车轮对接器210,并且可以相对于车轮对接器210围绕第一轴线223a旋转,第一轴线223a可以平行于(或基本平行于)车轮对接器轴线211。在一些实施例中,第一臂221在其第一端部221a处利用第一枢转连接件223连接至车轮对接器。第二臂222可以连接至车轮对接器210,并且可以相对于车轮对接器210围绕第二轴线224a旋转,第二轴线224a可以平行于(或基本平行于)车轮对接器轴线211。在一些实施例中,第二臂222在其第一端部222a处利用第二枢转连接件224连接至车轮对接器210。在各种实施例中,第一臂221和/或第二臂222可以平行于(或基本平行于)车轮对接器平面213,车轮对接器平面213垂直于车轮对接器轴线211。在各种实施例中,第一枢转连接件223和第二枢转连接件224中的每一个都可以是直的枢转件(例如,支承件或旋转接头)或球形接头。例如,如图2a所示,第一枢转连接件223和第二枢转连接件224可以是直的枢转件(例如,支承件、旋转枢转件、等等)。
111.车轮对接器210可以具有不同的形状。在图4a和图4b所示的实施例中,车轮对接器210包括在第一轴线223a与第二轴线224a之间延伸的第一车轮对接器部分210a,以及垂直于第一车轮对接器部分210a并且从第一车轮对接器部分210a朝向车轮对接器轴线211延伸的第二车轮对接器部分210b。
112.转向组件230可以具有转向轴线235。在一些实施例中,转向轴线235垂直于(或基本垂直于)车轮对接器轴线211。转向组件230可以引起悬架组件220和车轮对接器210围绕转向轴线235的转向旋转235a以及悬架组件220的悬架运动。
113.在一些实施例中,转向组件230包括第五枢转连接件232、第六枢转连接件234和转向臂236。例如,第五枢转连接件232、第六枢转连接件234和转向臂236可以分别类似于上文
参考图3a-3c描述的第五枢转连接件132、第六枢转连接件134和转向臂136。
114.第一臂221可以例如在其第二端部221b处利用第五枢转连接件232连接至副车架205。第二臂222可以例如在其第二端部222b处利用第六枢转连接件234连接至副车架205。在各种实施例中,第五枢转连接件232和第六枢转连接件234中的每一个都包括一个或更多个直的枢转件(例如,支承件或旋转接头)、万向接头或球形接头。
115.第五枢转连接件232和第六枢转连接件234可以引起第一臂221和第二臂222分别围绕转向轴线235的转向旋转235a,以及第一臂221和第二臂222分别围绕第三轴线232aa和第四轴线234a的旋转,第三轴线232aa和第四轴线234a平行于(或基本平行于)车轮对接器轴线211。
116.例如,在图4a所示的实施例中,第五枢转连接件232包括具有平行于车轮对接器轴线211的第三轴线232aa的第一直的枢转件232a和具有与转向轴线235重合的轴线的第二直的枢转件232b。这可以例如引起第一臂221围绕转向轴线235和围绕第三轴线232aa的旋转。
117.然而,在图4a所示的实施例中,第六枢转连接件234可以是球形接头和万向接头中的一种,以引起第二臂222围绕转向轴线235和围绕第四轴线234a的旋转。
118.在一些实施例中,第三轴线232aa和第四轴线234a沿着轴线201位于第一轴线223a和第二轴线224a的前面,轴线201可以与从交通工具的后端向前端延伸的交通工具纵向轴线对齐(例如,悬架系统200的拖曳臂式构造;如图4a和图4b所示)。在一些实施例中,第三轴线232aa和第四轴线234a沿着轴线201位于车轮对接器轴线211的前面(例如,悬架系统200的拖曳臂式构造)。
119.在一些实施例中,第一轴线223a和第二轴线224a沿着轴线201位于第三轴线232aa和第四轴线234a的前面(例如,悬架系统200的导向臂式构造)。在一些实施例中,第一轴线223a和第二轴线224a沿着轴线201位于车轮对接器轴线211的前面(例如,悬架系统200的导向臂式构造)。
120.第五枢转连接件232和第六枢转连接件234(例如,如关于图4a和图4b所描述和示出的)可以引起悬架组件220的部件在平行于车轮对接器平面213(其例如垂直于车轮对接器轴线211)的平面中运动,而不会引起转向组件230运动。例如,与当前的悬架系统(例如,拖曳臂式悬架系统)相比,这可以最小化悬架组件220和车轮对接器210的非预期的转向旋转(例如,颠簸转向)。
121.转向臂236可以连接至悬架组件220。例如,转向臂236可以在其第一端部236a处连接至悬架组件220的第一臂221。
122.阻尼和弹性装置228可以连接在例如第一臂221与第二臂222之间、臂221、222中的一个与车轮对接器210之间或者臂221、222中的一个与副车架205/交通工具的参考车架之间。
123.在一些实施例中,第一臂221、第二臂222和车轮对接器210的尺寸被确定并且第一轴线223a、第二轴线224a、第三轴线232aa和第四轴线234a的位置被设置成引起车轮对接器210沿着车轮对接器运动轴线212做基本线性的运动,车轮对接器运动轴线212是垂直于车轮对接器轴线211的轴线。在一些实施例中,第一臂221、第二臂222和车轮对接器210的尺寸被确定并且第一轴线223a、第二轴线224a、第三轴线232aa和第四轴线234a的位置被设置成形成悬架系统200的基本平行四边形的形状。这可以例如引起车轮对接器210沿着车轮对接
器运动轴线212做基本线性的运动,车轮对接器运动轴线212是垂直于车轮对接器轴线211的轴线。
124.车轮对接器运动轴线212可以平行于装配有悬架系统200的交通工具的竖直轴线72。这可以例如引起车轮对接器110沿着平行于装配有悬架系统100的交通工具的竖直轴线72的轴线做基本线性的运动。
125.在一些实施例中,转向组件230的转向轴线235是倾斜的转向轴线(例如,如上文参考图3c所述)。
126.在各种实施例中,车轮对接器210被成形为引起正外倾角或负外倾角(例如,如上文关于图1j-1k所述)。
127.在一些实施例中,悬架系统200的至少一部分被设置在车轮90的轮辋92内。例如,当车轮90被装配到悬架系统200中时(例如,如图4c和图4d所示),悬架系统200的至少一部分被设置在车轮90的轮辋92内。例如,悬架系统200的至少25%被设置在车轮90的轮辋92的体积内。在一些实施例中,车轮对接器210的至少75%被设置在车轮90的轮辋92的体积内。在一些实施例中,臂221和222中的一个或更多个的至少75%被设置在车轮90的轮辋92的体积内。在一些实施例中,例如,如以图2a为例所示,悬架系统200的长度和高度小于车轮90的轮辋92的直径。在一些实施例中,悬架系统200的最大长度和最大高度小于车轮90的轮辋92的直径。
128.在一些实施例中,悬架系统200能够与动力传动系的子系统一起操作。动力传动系的子系统可以包括旋转马达/半轴和传动轴,以将旋转马达/半轴与车轮对接器210连接。传动轴可以传递来自交通工具的动力传动系的子系统的旋转马达/半轴的扭矩力,从而当车轮90被装配到悬架系统200中时使车轮90旋转。
129.在一些实施例中,在悬架组件220的第一臂221与第二臂222之间形成间隙218。间隙218可以用于容纳交通工具的一个或更多个子系统的一个或更多个部件。例如,间隙218可以容纳动力传动系的子系统的传动轴,其中传动轴可以从交通工具的参考车架朝向车轮对接器110/车轮90延伸。在一些实施例中,阻尼和弹性装置228被设置在间隙218内。
130.在各种实施例中,第一臂221和/或第二臂222是弯曲的(例如,如图4a和图4b所示)。与直的臂相比,弯曲的臂沿其弯曲的纵向尺寸可以具有更长的距离。例如,与具有直的第一臂221和/或第二臂222的实施例相比,这可以引起车轮对接器210沿着车轮对接器运动轴线212行进更长的距离。与直的臂之间的间隙相比,这也可以增加弯曲的臂之间的间隙218。增加的间隙218可以例如为交通工具的一个或更多个子系统的一个或更多个部件提供更多的空间。
131.在一些实施例中,第一臂221、第二臂222和车轮对接器110中的至少一个包括孔。在一些实施例中,阻尼和弹性装置228的至少一部分被设置在其孔内。在一些实施例中,阻尼和弹性装置228的至少一部分可以在其孔内运动。例如,与没有孔的实施例相比,这可以允许车轮对接器210沿着车轮对接器运动轴线212行进更长的距离。
132.例如,在图4a所示的实施例中,第一臂221包括第一臂孔221c,并且车轮对接器210包括车轮对接器孔210c。阻尼和弹性装置228的至少一部分可以被设置在第一臂孔221c和车轮对接器孔210c中的至少一个内和/或可在第一臂孔221c和车轮对接器孔210c中的至少一个内运动。在一些实施例中,第一臂孔221c被设置在第一臂221的第一端部221a处(例如,
邻近第一轴线223a;如图4a所示)。在一些实施例中,车轮对接器孔210c被设置在车轮对接器210的邻近第一轴线223的端部处(例如,如图4a所示)。
133.在一些实施例中,第二臂222包括第二臂孔。第二臂孔可以类似于第一臂221的第一臂孔221c。
134.本发明的一些实施例可以提供一种交通工具,其包括本文其他地方描述的两个或更多个悬架系统(例如,悬架系统100和悬架系统200)。在一些实施例中,交通工具包括装配到悬架系统中的两个或更多个车轮(例如,如本文其他地方所述)。交通工具例如可以是客车、商用交通工具、运动型多功能交通工具、电动车、面包车,等等。
135.在一些实施例中,悬架系统中的至少两个悬架系统以导向臂式构造被装配至交通工具,其中车桥沿着交通工具前后轴线位于悬架系统的臂的前面。在一些实施例中,悬架系统中的至少两个悬架系统以拖曳臂式构造装配,其中车桥沿着交通工具前后轴线位于悬架系统的臂的后面。
136.有利的是,例如,当车轮被装配到悬架系统中时,所公开的悬架系统或其至少一部分(例如,至少25%)可以位于车轮的轮辋内,因此与当前的悬架系统(例如,拖曳臂式悬架系统)相比占据交通工具底盘的更少空间。此外,所公开的悬架系统可适于为车轮提供各种外倾角(例如,恒定的正外倾角或负外倾角)和倾斜的转向轴线(例如,恒定的倾斜的转向轴线)。此外,与当前的悬架系统相比,所公开的悬架系统可以最小化悬架组件和车轮对接器的非预期的转向旋转。此外,所公开的悬架系统的一些实施例可以利用线控驱动技术(例如线控转向、线控制动等)。
137.在以上描述中,实施例为本发明的示例或实施方式。“一个实施例”、“实施例”、“某些实施例”或“一些实施例”的各种呈现不一定全都指代相同的实施例。尽管可以在单个实施例的背景下描述本发明的各种特征,但是这些特征也可以单独提供或以任何合适的组合提供。相反,尽管为了清楚起见,本文可能在单独的实施例的背景下描述了本发明,但是本发明也可以在单个实施例中实现。本发明的某些实施例可以包括来自上面公开的不同实施例的特征,并且某些实施例可以包含来自上面公开的其他实施例的元件。在特定实施例的背景下公开的本发明的元件不应被视为将他们的使用限制在单独的特定实施例中。此外,应当理解,本发明可以以各种方式实现或实施,并且本发明可以在除了以上描述中概述的实施例之外的某些实施例中实现。
138.本发明不限于那些附图或相应的描述。例如,流程不需要移动通过每个所示的框或状态,或者以所示和所述的完全相同的顺序移动。除非另外定义,否则本文使用的技术和科学术语的含义应如本发明所属领域的普通技术人员通常地理解的。虽然已经相对于有限数量的实施例描述了本发明,但是这些实施例不应该被解释为对本发明范围的限制,而是作为一些优选实施例的范例。其他可能的变化、修改和应用也在本发明的范围内。因此,本发明的范围不应受到迄今为止所描述的内容的限制,而应受所附权利要求及其合法等同物的限制。