1.本发明涉及新能源汽车控制技术领域,特别涉及一种城市客车能耗控制装置。
背景技术:
2.氢燃料电池是一种利用氢和氧之间的电化学反应产生电能的能源装置,凭借氢能零排放、高效率、低噪音的优点,可广泛应用于新能源汽车中进行供电。特别是在城市客车领域,氢燃料电池供电的客车正在成为新能源客车未来的主流发展方向。
3.但是由于城市道路的路况较为复杂,驾驶员在驾驶城市客车在城市道路行驶的过程,驾驶习惯不同会导致形车能耗不同,如果驾驶员习惯激烈驾驶,特别是在拥堵路段前加速行驶至距离前车较近的位置再刹停,这种行驶过程中频繁的加速和急刹容易导致城市客车的能耗过高,缩短续航里程,而且存在安全隐患。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种城市客车能耗控制装置,提前感知拥堵路段的距离信息以控制电机控制器和制动控制器的运行,使得城市客车能够滑行接近拥堵路段,避免急加速和急刹车造成的能源损耗,并提高驾驶安全性。
5.根据本发明的第一方面实施例的一种城市客车能耗控制装置,包括:电机控制器,用于控制城市客车的驱动电机转动;制动控制器,用于降低所述城市客车的行驶速度;电子地图模块,用于设定行驶路线并获取路况信息;gps模块,用于获取所述城市客车的位置信息;距离计算模块,用于计算所述城市客车与拥堵路段之间的距离信息;车速检测模块,用于获取所述城市客车的速度信息;整车控制器,所述整车控制器分别与所述电子地图模块、所述gps模块、所述距离计算模块、所述车速检测模块以及所述电机控制器和所述制动控制器连接以根据所述路况信息、所述位置信息、所述距离信息以及所述速度信息控制所述电机控制器和所述制动控制器的运行,使得所述城市客车与所述拥堵路段之间的距离为第一预设距离时,所述城市客车的行驶速度处于第一预设速度并关闭所述驱动电机以使得所述城市客车能够滑行接近所述拥堵路段。
6.根据本发明实施例的一种城市客车能耗控制装置,至少具有如下有益效果:
7.本发明的城市客车能耗控制装置,利用电子地图模块可以提前感知拥堵路段的路况信息,而利用gps模块以及距离计算模块则可以计算客车当前位置与拥堵路段之间的距离,提前感知到前方出现拥堵后,整车控制器通过车速检测模块获取客车当前的速度与第一预设速度比较并控制电机控制器和制动控制器的运行,使得客车在距离拥堵路段的距离为第一预设距离时,将客车的车速调整至处于第一预设速度,此时关闭驱动电机使得客车以第一预设速度作为起始速度并依靠惯性滑行,直至接近所述拥堵路段后制动停车,提高了驾驶的安全性,并且可以将客车动力装置产生的电能充分用于驱动电机驱使城市客车行驶,优化了能源的有效利用率,避免了遇到拥堵路段前驾驶员急加速和急刹车导致的能源
浪费,从而有效降低客车的能耗,有利于延长客车的续航里程。
8.根据本发明的一些实施例,还包括前车信息获取模块,用于检测所述城市客车与前车之间的车距信息,所述整车控制器还设置有安全停车距离,所述安全停车距离小于所述第一预设距离,所述整车控制器与所述前车信息获取模块连接以根据所述车距信息和所述安全停车距离控制所述电机控制器和所述制动控制器的运行。
9.根据本发明的一些实施例,所述整车控制器根据所述速度信息和所述车距信息控制所述制动控制器的运行,以使得所述城市客车与前车之间的距离为所述安全停车距离时所述城市客车停车。
10.根据本发明的一些实施例,所述整车控制器还设置有第二预设速度,所述第二预设速度小于所述第一预设速度,当所述城市客车的行驶速度为0并且所述城市客车与前车之间的距离大于所述安全停车距离时,所述整车控制器控制所述电机控制器和所述制动控制器的运行,使得所述城市客车以所述第二预设速度行驶至所述安全停车距离处并制动停车。
11.根据本发明的一些实施例,所述前车信息获取模块为激光雷达或者微波雷达。
12.根据本发明的一些实施例,还包括能量回收模块,所述能量回收模块与所述驱动电机连接以控制所述驱动电机的反转进行能量回收。
13.根据本发明的一些实施例,所述能量回收模块具有多个能量回收比例,所述整车控制器与所述能量回收模块连接以根据所述速度信息调节所述能量回收模块的能量回收比例。
14.根据本发明的一些实施例,还包括氢燃料电池堆和动力电池组,所述氢燃料电池堆和所述动力电池组均通过所述电机控制器与所述驱动电机连接以提供能量驱使所述驱动电机转动,所述能量回收模块与所述动力电池组连接以使得回收的能量能够存储于所述动力电池组中。
15.根据本发明的一些实施例,还包括与所述氢燃料电池堆连接的燃料电池控制器和与所述动力电池组连接的动力电池管理器,所述整车控制器分别与所述燃料电池控制器和所述动力电池管理器连接以根据所述速度信息控制切换所述氢燃料电池堆和所述动力电池组提供能量。
16.根据本发明的一些实施例,所述动力电池管理器具有电量检测单元,所述电量检测单元用于获取所述动力电池组的电量信息,所述整车控制器与所述电量检测单元连接以根据所述电量信息控制所述能量回收模块的运行。
17.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
18.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
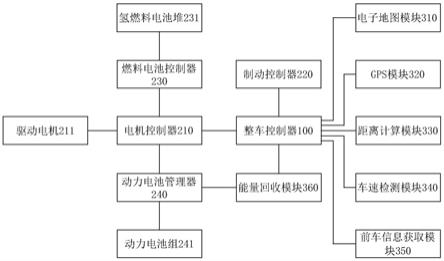
19.图1为本发明城市客车能耗控制装置其中一种实施例的原理结构框图。
20.附图标记:
21.整车控制器100、电机控制器210、驱动电机211、制动控制器220、燃料电池控制器
230、氢燃料电池堆231、动力电池管理器240、动力电池组241、电子地图模块310、gps模块320、距离计算模块330、车速检测模块340、前车信息获取模块350、能量回收模块360。
具体实施方式
22.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
23.在本发明的描述中,需要理解的是,涉及到方位描述,例如术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
24.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
25.本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
26.如图1所示,根据本发明实施例的一种城市客车能耗控制装置,包括电机控制器210、制动控制器220、电子地图模块310、gps模块320、距离计算模块330、车速检测模块340以及整车控制器100,电机控制器210用于控制城市客车的驱动电机211转动,制动控制器220用于降低城市客车的行驶速度,电子地图模块310用于设定行驶路线并获取路况信息,gps模块320用于获取城市客车的位置信息,距离计算模块330用于计算城市客车与拥堵路段之间的距离信息,车速检测模块340用于获取城市客车的速度信息,整车控制器100分别与电子地图模块310、gps模块320、距离计算模块330、车速检测模块340以及电机控制器210和制动控制器220连接以根据路况信息、位置信息、距离信息以及速度信息控制电机控制器210和制动控制器220的运行,使得城市客车与拥堵路段之间的距离为第一预设距离时,城市客车的行驶速度处于第一预设速度并关闭驱动电机211以使得城市客车能够滑行接近拥堵路段。
27.其中,电子地图模块310可以是目前现有的导航地图软件,gps模块320用于对城市客车进行定位以获取其所处的具体位置,距离计算模块330可以是cpu或者mcu,车速检测模块340可以是设置在城市客车上的车速传感器或者是轮速传感器,第一预设距离和第一预设速度可以根据城市客车在城市道路中的行驶情况综合测量和实验确定,具体地,例如可以将第一预设速度设定为30km/h,城市客车按照30km/h的速度为初始速度滑行至停车位置的滑行距离为第一预设距离,该滑行距离的数据可以是城市客车在不同铺装路面多次试验的平均值,例如第一预设距离可以设定为70m。需要说明的是,驾驶员可以在电子地图模块
310中设定城市客车的行驶路线,通过电子地图模块310可以提前感知行驶路线的路况信息,gps模块320可以实时监测城市客车的位置信息,利用距离计算模块330根据路况信息和位置信息可以计算城市客车的当前位置与拥堵路段之间的距离,当感知到城市客车的前方有出现拥堵,整车控制器100通过车速检测模块340获取城市客车的实时速度信息并与第一预设速度30km/h比较以控制电机控制器210和制动控制器220的运行,具体地,例如在距离拥堵位置200m时感知到前方出现拥堵,若此时的车速为60km/h,则可以在接下来130m的路程中通过控制加减速操作以使得城市客车的车速逐渐降低至30km/h,从而使得城市客车行驶至与拥堵路段之间的距离为第一预设距离的70m时调整城市客车的行驶速度处于第一预设速度30km/h,同时关闭驱动电机211的驱动行驶功能,城市客车将以第一预设速度30km/h作为起始速度并依靠惯性滑行接近拥堵路段,避免了在遇到拥堵路段前驾驶员操作急加速和急刹车导致的能源浪费,不仅可以将城市客车动力装置产生的能量充分作用于驱动电机211驱使城市客车行驶,减少了频繁急刹车所引起的能量损耗,优化了能源的有效利用率,有利于延长城市客车整体的续航里程,而且城市客车在接近拥堵路段直至停车前的行驶为惯性滑动,车速逐渐降低,使得城市客车在与拥堵路段的车辆较为接近时车速较低,便于及时控制停车,有利于提高了驾驶的安全性。
28.在本发明的一些实施例中,还包括前车信息获取模块350,用于检测城市客车与前车之间的车距信息,整车控制器100还设置有安全停车距离,安全停车距离小于第一预设距离,整车控制器100与前车信息获取模块350连接以根据车距信息和安全停车距离控制电机控制器210和制动控制器220的运行。
29.可以理解的是,城市客车在滑行接近拥堵路段的过程中,由于滑行的路段路面条件不同,可能会出现滑行后城市客车与前车之间的距离过远或者过近的情况,为确保停车安全,提前设定安全停车距离,并通过整车控制器100根据前车信息获取模块350检测的城市客车与前车之间的车距信息和安全停车距离比较以不断调整电机控制器210和制动控制器220的运行,保持城市客车与前车之间良好的跟车距离,从而保证城市客车的安全行驶。
30.在本发明的一些实施例中,整车控制器100根据速度信息和车距信息控制制动控制器220的运行,以使得城市客车与前车之间的距离为安全停车距离时城市客车停车。
31.需要说明的是,由于城市客车在滑行的过程中会出现遇到下坡路段的情况,甚至有可能导致滑行的速度大于第一预设速度,城市客车在与前车较为接近时若车速过快则会存在安全隐患,利用车速检测模块340能够持续检测城市客车的速度信息,整车控制器100根据城市客车的速度信息和城市客车与前车之间的车距信息控制制动控制器220的运行,在下坡路段滑行时通过制动控制器220逐渐降低车速,并且使得城市客车与前车之间的距离为安全停车距离时城市客车的车速降低为0以实现安全停车,避免发生追尾事故,消除安全隐患。
32.在本发明的一些实施例中,整车控制器100还设置有第二预设速度,第二预设速度小于第一预设速度,当城市客车的行驶速度为0并且城市客车与前车之间的距离大于安全停车距离时,整车控制器100控制电机控制器210和制动控制器220的运行,使得城市客车以第二预设速度行驶至安全停车距离处并制动停车。
33.可以理解的是,如果城市客车在第一预设距离自由滑行的过程中遇到上坡路段,则可能会导致滑行停车的位置距离前车过远,因此需要通过电机控制器210控制驱动电机
211转动驱使城市客车以一个较低的速度继续行驶靠近前车,例如可以将第二预设速度设置为5km/h,使得城市客车能够继续以5km/h的速度行驶缩小城市客车与前车之间的车距,并在城市客车到达安全停车距离处通过制动控制器220制动实现停车。
34.在本发明的一些实施例中,前车信息获取模块350为激光雷达或者微波雷达。
35.具体地,前车信息获取模块350可以是激光雷达或者微波雷达,激光雷达和微波雷达的工作原理都是依靠发射电磁波并检测采集城市客车的前车反向散射的信号以计算和获取城市客车与前车之间的车距信息,其中激光雷达传输和检测的是光信号,微波雷达传输和检测的是射频信号。激光雷达是激光计算和雷达技术想结合的产物,具有探测精度高、频率高的优势,并且受环境的干扰较弱,能够实时检测与前车之间的安全距离。而微波雷达则是发射微波,微波即波长很短的无线电波,微波的方向性好,遇到前车后立即被反射回来并被雷达接收,从而根据微波往返的时间可以测算城市客车与前车之间的距离,并且在浓雾、浓烟、多灰等环境的穿透能力强,具有全天候全天时的优点。因此在应用时,可以根据城市客车行驶的路况环境来按需装配激光雷达或者微波雷达。
36.在本发明的一些实施例中,还包括能量回收模块360,能量回收模块360与驱动电机211连接以控制驱动电机211的反转进行能量回收。
37.需要说明的是,城市客车在城市道路中行驶时,频繁的刹车减速和制动操作会导致动能转化为无谓的热能而浪费,采用制动能量回收技术控制驱动电机211反转发电,通过再生制动能量回收系统技术将城市客车的动能利用能量回收模块360转变为电能进行能量回收并进行存储,能够降低能量的无谓损耗并有效提高城市客车的续航里程。具体地,在需要进行减速制动时,驱动电机211反转转变为发电机施加反向扭矩,形成反向电流给动力电池组241充电,既达到了降低城市客车车速的制动目的,又可以提高城市客车的能量利用率。
38.在本发明的一些实施例中,能量回收模块360具有多个能量回收比例,整车控制器100与能量回收模块360连接以根据速度信息调节能量回收模块360的能量回收比例。
39.需要说明的是,氢燃料电池客车采用的能量再生制动与传统的刹车制动相比,会对驾驶感受产生影响,能量回收比例的设置不但会影响到回收能量的总额,不同的能量回收比例在制动时所产生的顿挫感也不同,如果制动能量的回收档位单一,在不同的车速条件下均采用同等的能量回收比例会明显降低车辆的稳定性和舒适性,影响城市客车的驾乘体验,因此可以在能量回收模块360中对不同的速度区间对应地预设多个不同的能量回收比例,具体地,能量回收比例的参数设置可以通过设置在城市客车上的实体按键或者屏幕上的虚拟按键进行设定和调节,在需要对制动能量进行回收时,整车控制器100根据当前的车速、动力电池电压、发电电流、发电效率和传动比的大小以及对应的能量回收比例进行计算,制动回收能量=能量回收比例
×
(动力电池电压
×
发电电流
×
发电效率/传动比),制动回收能量除以驱动电机211的转速即可得出制动扭矩,整车控制器100通过计算该制动扭矩以及需要达到的制动实际效果,分配电机制动力和机械制动力后实施制动以保证制动过程的稳定性和安全性。需要说明的是,多个不同的能量回收比例可以是多个离散的比例值,或者也可以是多个连续的比例值,具体地,例如可以将能量回收比例5%对应的速度区间设定为20km/h-30km/h,能量回收比例8%对应的速度区间设定为30km/h-40km/h,10%的能量回收比例对应的速度区间设定为40km/h-50km/h,15%的能量回收比例对应的速度区间设
定为50km/h-60km/h,整车控制器100通过车速检测模块340能够实时获取城市客车的速度信息,根据城市客车的当前速度可以判断当前速度落入哪个速度区间,以城市客车的当前速度为52km/h举例说明,则该当前速度对应的目标速度区间为预设的50km/h-60km/h,由此可以进一步获取目标速度区间为50km/h-60km/h对应的能量回收比例为15%,从而可以最终确定15%为当前速度下的目标能量回收比例。可以理解的是,还能将能量回收比例通过不同的能量回收档位来表示,从而对不同的速度区间能够进行不同档位的能量回收。城市客车在需要减速制动时,整车控制器100根据城市客车的速度信息从预设的多个能量回收比例中确定当前速度对应的目标能量回收比例,根据目标能量回收比例可以从城市客车制动时的制动能量中确定目标制动回收能量,将该目标制动回收能量转化为目标电能并利用该目标电能可以给动力电池组241充电和储能,最终实现了对应比例的制动能量回收。通过整车控制器100根据城市客车的行驶状况来使得能量回收模块360能够匹配适当的能量回收比例,从而提高了城市客车在制动能量回收过程中的稳定性和舒适性,有效避免了由于能量回收档位不当而引起的驾乘体验不佳的问题。
40.在本发明的一些实施例中,还包括氢燃料电池堆231和动力电池组241,氢燃料电池堆231和动力电池组241均通过电机控制器210与驱动电机211连接以提供能量驱使驱动电机211转动,能量回收模块360与动力电池组241连接以使得回收的能量能够存储于动力电池组241中。
41.需要说明的是,可以利用氢燃料电池堆231作为城市客车的主动力源,动力电池组241则作为城市客车的辅助动力源,其中,氢燃料电池堆231可以是质子交换膜燃料电池,动力电池组241可以是磷酸铁锂电池或者三元锂电池,氢燃料电池堆231和动力电池组241均通过电机控制器210与驱动电机211连接以单独或者共同提供能量驱使驱动电机211转动,并且制动能量的回收存储由技术相对而言更加成熟的动力电池组241来完成,可以在一定程度上弥补氢燃料电池技术上的不足,采用双重动力源既能减小对氢燃料电池堆231的功率需求,又能在氢燃料电池堆231出现故障时依靠动力电池组241维持城市客车继续行驶,有利于提高城市客车动力系统的可靠性。
42.在本发明的一些实施例中,还包括与氢燃料电池堆231连接的燃料电池控制器230和与动力电池组241连接的动力电池管理器240,整车控制器100分别与燃料电池控制器230和动力电池管理器240连接以根据速度信息控制切换氢燃料电池堆231和动力电池组241提供能量。
43.需要说明的是,整车控制器100可以根据车速的不同以及驱动电机211所需的输出功率需求切换氢燃料电池堆231和动力电池组241来作为驱动城市客车行驶的动力源,例如在起步阶段功率需求量不大时,可以依靠动力电池组241单独提供能量,而在加速行驶等功率需求较大时,燃料电池控制器230控制氢燃料电池堆231和动力电池管理器240控制动力电池组241共同产生电能并输送给驱动电机211产生驱动力实现城市客车的驱动。因此,根据城市客车的行驶需求调整切换不同的动力源提供能量,既能利用氢燃料电池堆231提供城市客车行驶所需的主要动力,又能在利用动力电池组241存储的回收能量作为城市客车行驶的辅助能量源以提供瞬时大扭矩,从而在满足驱动电机211所需功率的同时,确保能源能够被有效分配管理和使用,进一步提高能量的有效利用率。
44.在本发明的一些实施例中,动力电池管理器240具有电量检测单元,电量检测单元
用于获取动力电池组241的电量信息,整车控制器100与电量检测单元连接以根据电量信息控制能量回收模块360的运行。
45.需要说明的是,电量信息可以用电池的soc(state ofcharge,荷电状态)值表示,指电池内的可用电量占标称容量的比例,代表的是电池使用一段时间或长期搁置不用后的剩余可放电电量与其完全充电状态的电量的比值,并且可以利用动力电池管理器240设定动力电池组241进行充放电的电量阈值,以设定停止充电的电量阈值为98%举例说明,当动力电池组241的剩余可用电量soc值大于98%时,关闭能量回收模块360的制动能量回收功能以防止动力电池组241过充。可以理解的是,通过电量检测单元对电量信息的监控使得整车控制器100能够根据电量信息而动态控制是否对动力电池组241进行充电,有效防止动力电池组241过放或者过充,有利于延长动力电池组241的使用寿命,提高动力电池组241的安全性。
46.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
47.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。