1.本发明涉及无人机领域,尤其涉及一种无人机多层充电仓。
背景技术:
2.无人机现在的应用越来越广泛了,比如应用于电力巡检、公安巡逻、影视航拍、农林植保、安防应急、航空测绘及交通执法等等,无人机在执行这些任务的时候,由于任务执行需要较长的时间,而无人机的续航时间无法满足执行任务所需的时间,所以在执行任务的期间需要去充电仓进行充电,特别电力巡检采用单台无人机无法完成巡检,存在放充电不方便,现有的充电仓自动充电技术还不成熟,在充电的过程中由于无人机降落在停机坪之后,存在着不稳定性,这样导致在充电装置不容易对准无人机上的充电接口,在自动充电过程中造成对准时间长,浪费时间,对准的效果也不好,造成充电的效率低,质量差,甚至造成根本无法充进电的情况,给后期带来了很大的麻烦,为了在规定的时间内完成任务,需要多架无人机去执行任务,这样往往需要多个充电仓才能满足充电需要,现有技术中往往就是多设几个充电仓,设置在不同的地方,这样就会浪费大量的人力物力,成本很高,而且占用的地方也多,非常不方便,在无人机找寻充电仓的过程中,往往事先是不知道充电仓有没有别的无人机在充电的,如果去的那个充电仓正好有别的无人机在充电,这样就得飞往下个站点,以此类推,非常浪费时间。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本发明目的在于提供一种无人机多层充电仓,解决了现有技术存在的问题,能够使得无人机降落在停机坪上后保持稳定的状态,实现了其和充电装置的精准快速地对接,从而进行充电,大大提高了效率,确保了良好的充电状况,同时在固定架上设置多层充电仓和接机装置,很好地完成了多架无人机的充电的衔接过程,大大提高了多架无人机充电的效率,降低了成本,节约了资源,节省了占地面积。
5.(二)技术方案
6.为实现上述目的,本发明提供如下技术方案:一种无人机多层充电仓,其特征在于,包括固定架;充电仓,充电仓设置在固定架上,且从上到下均匀地设置有若干层,其包括固定座,固定座上固定有停机坪、对正装置及移动充电装置,停机坪上停放无人机,无人机包括无人机本体,无人机本体上固定有平稳支撑架,平稳支撑架上设有充电接口;升降装置,升降装置设置在固定架的正前方;接机装置,接机装置设置在升降装置上,其包括固定座,固定座上设有停机坪、对正装置和推动装置,其中还包括巡检导航装置、通讯单元、微气象装置、导航坐标装置、管控单元、仓体装置、声光装置、安全隔离有效巡检保障电力设施、自动充电和自学习精准巡航。
7.优选的,升降装置包括固定在固定架上的左侧固定板和右侧固定板,左侧固定板和右侧固定板的顶端通过连接板固定连接,左侧固定板靠近顶部处固定有电机,电机的输
出轴的端部穿过左侧固定板与右侧固定板转动连接,输出轴的左右两端分别固定有齿轮,齿轮上绕有链条,链条的一端固定在接机装置的固定座上,其另一端伸进箱体内且其上固定有金属块,箱体的顶面设有通孔,通孔的大小小于金属块的大小。
8.优选的,左侧固定板和右侧固定板上设有滑轨,接机装置上设有与滑轨相适配的滑块。
9.优选的,平稳支撑架包括固定在所述无人机本体上的四根支撑柱,四根支撑柱的底面处于同一水平面上,其两两之间分别固定有前连接板、侧连接板和后连接板。
10.优选的,对正装置包括电机立板,电机立板上固定有电机,电机的输出轴固定有联轴器,联轴器的输出轴连接有右侧校正装置和左侧校正装置,右侧校正装置和左侧校正装置互为镜像设置,两者之间通过同步杆连接在一起。
11.优选的,右侧校正装置包括固定在联轴器输出轴端部的主动轮,主动轮上设有同步带,同步带的前端绕在前从动轮上,其后端绕在后从动轮上,前从动轮和后从动轮上分别固定有丝杠的一端,丝杠的另一端设置在限位座上,且丝杠上设有与其相匹配的丝杠螺母,丝杠螺母上固定连接有丝杠螺母座,丝杠螺母座的顶部固定连接有推板的端部,丝杠螺母座上设有感应器。
12.优选的,联轴器的输出端穿过右立板固定有主动轮,主动轮的下方设有右辅助轮,右辅助轮通过同步杆a与左辅助轮连接,同步杆a穿出右辅助轮和左辅助轮,其两端部分别连接在右立板和左立板上,右立板和左立板上连接同步杆a的端部处设有竖直的长条形孔。
13.优选的,移动充电装置包括电机a,电机a的输出轴上固定连接有主动轮a,主动轮a上绕有同步带a的一端,同步带a的另一端绕在从动轮a上,从动轮a的中部固定连接有同步杆b,同步杆b的两端部穿过挡板固定有从动轮b,从动轮b上绕有同步带b的一端,同步带b的另一端绕有从动轮c,同步带b上固定连接有l型折弯板,l型折弯板的上端固定有移动杆的端部,移动杆上设有与充电接口10相适配的充电装置。
14.优选的,挡板上设有滑轨,l型折弯板上设有与滑轨相适配的滑块。
15.优选的,推板的高度在固定座和平稳支撑架的高度之间。
16.(三)有益效果
17.1.本发明目的在于提供一种无人机多层充电仓,实现了无人机的平稳安全停放,平稳对正以及精准快速地对准充电,规划巡检航线自动完成巡检,非常便捷,大大提高了充电的效率,节省了时间,双向隔离管控本系统无人机,防止外来无人机闯入,保障重要设施安全,使得充电的完成率大大得到了提高,避免了由于充电接口无法对准而产生的大量麻烦;
18.2.本发明在固定架上设置多层充电仓和接机装置,很好地完成了多架无人机的充电的衔接过程,大大提高了多架无人机充电的效率,降低了成本,节约了资源,节省了占地面积。
附图说明
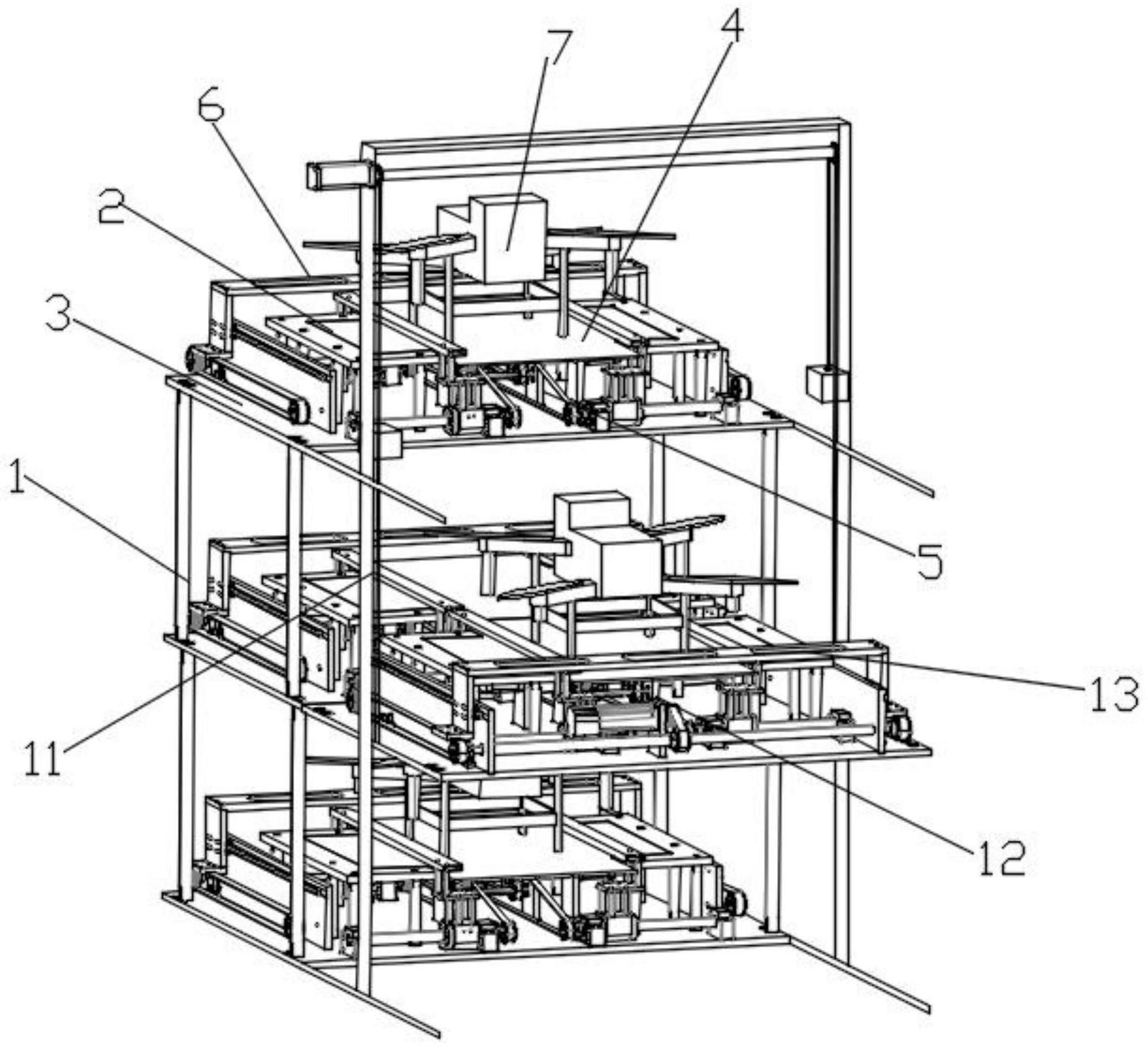
19.图1为本发明整体示意图。
20.图2为本发明升降装置示意图。
21.图3为本发明无人机的具体示意图。
22.图4为本发明对正装置的具体示意图。
23.图5为本发明右侧校正装置和左侧校正装置的具体示意图。
24.图6为本发明右辅助轮和左辅助轮的具体示意图。
25.图7为本发明长条形孔的具体示意图。
26.图8为本发明移动充电装置的具体示意图。
27.图9位本发明的整体模块示意图。
28.图中:1-固定架、2-充电仓、3-固定座、4-停机坪、5-对正装置、6-移动充电装置、7-无人机、8-无人机本体、9-平稳支撑架、10-充电接口、11-升降装置、12-接机装置、13-推动装置、14-左侧固定板、15-右侧固定板、16-连接板、17-电机、18-输出轴、19-齿轮、20-链条、21-箱体、22-通孔、23-支撑柱、 24-前连接板、25-侧连接板、26-后连接板、27-电机立板、28-电机b、29-联轴器、30-右侧校正装置、31-左侧校正装置、32-同步杆、33-主动轮、34-同步带、35-前从动轮、36-后从动轮、37-丝杠、38-丝杠螺母、39-丝杠螺母座、40
‑ꢀ
推板、41-感应器、42-右立板、43-右辅助轮、44-左辅助轮、45-同步杆a、46
‑ꢀ
左立板、47-长条形孔、48-电机a、49-主动轮a、50-同步带a、51-从动轮a、 52-同步杆b、53-挡板、54-从动轮b、55-同步带b、56-从动轮c、57-l型折弯板、58-移动杆、59-滑轨、60-滑块。
具体实施方式
29.下面将结合本发明实施例中的附图1-8对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.本发明提供一种技术方案:一种无人机多层充电仓,其特征在于,包括固定架1;充电仓2,充电仓2设置在固定架1上,且从上到下均匀地设置有若干层,其包括固定座3,固定座3上固定有停机坪4、对正装置5及移动充电装置6,停机坪4上停放无人机7,无人机7包括无人机本体8,无人机本体8上固定有平稳支撑架9,平稳支撑架9上设有充电接口10;升降装置11,升降装置11设置在固定架1的正前方;接机装置12,接机装置12设置在升降装置11上,其包括固定座3,固定座3上设有停机坪4、对正装置5和推动装置13,其中还包括巡检导航装置、通讯单元、微气象装置、导航坐标装置、管控单元、仓体装置、声光装置、安全隔离有效巡检保障电力设施、自动充电和自学习精准巡航,当需要对多架无人机7进行充电的时候,无人机7 的控制装置(图中为示意)使得无人机7降落在多层充电仓的接机装置12上,由于无人机7上设有平稳支撑架9,其降落后是平稳支撑架9与停机坪4接触,这样解决了传统的无人机直接降落在停机坪上造成的不稳定的问题,平稳支撑架9很好地保证了无人机7的稳定性,接机装置12的结构和充电仓2的结构大体相同,其上的推动装置13与移动充电装置6的结构基本一致,只是推动装置13上没有设置充电装置,只是起到将停在其上的无人机7推到相应的充电仓2的停机坪4上的作用,接机装置12上设有感应器,当有无人机7停在其上的时候,升降装置11就会启动,使得接机装置12上升或者下降,同时接机装置12上的对正装置5将其对正,在接机装置12升降的过程中,接机装置12在经过每一层充电仓2的时候,其上的感应器就会感应,如果感应到了有无人机7在充电,那就继续上升或者下降去下一层的充电仓2,如果感应到了没有无人机7在充电,那么推动装置13就会将无人机7推向与其处于同一
平面的充电仓2,推入充电仓2之后,充电仓2上的对正装置5对无人机 7重新进行对正,对正好之后,移动充电装置6就会向无人机7靠拢,直至与充电接口10对接上,进行充电,当充电完成之后,无人机7就会发出充电完成的信号,这时接机装置12就会接受到信号,升降装置11就会将接机装置 12送至充完电的无人机7处,这时无人机7被充电仓2上的移动充电装置6 推至接机装置12上的停机坪上,然后无人机7就可以飞走继续执行任务,就这样通过接机装置12在这个多层充电仓上完成了多架无人机7的衔接式充电,大大提高了多架无人机充电的效率,降低了成本,节约了资源,节省了占地面积,如果没有接机装置12,无人机7很难准确地飞入这种多层充电仓,存在着技术壁垒,固定架1上设置的隔离装置可以防止外面无人机的闯入,合法无人机管理,导航装置可以通过北斗系统设立坐标自学习精确导航,视觉装置的设立可以识别码转换指令辅助导航。
31.升降装置11包括固定在固定架1上的左侧固定板14和右侧固定板15,左侧固定板14和右侧固定板15的顶端通过连接板16固定连接,左侧固定板 14靠近顶部处固定有电机17,电机17的输出轴18的端部穿过左侧固定板14 与右侧固定板15转动连接,输出轴18的左右两端分别固定有齿轮19,齿轮 19上绕有链条20,链条20的一端固定在接机装置12的固定座3上,其另一端伸进箱体21内且其上固定有金属块,箱体21的顶面设有通孔22,通孔22 的大小小于金属块的大小,箱体21设有预留长度的链条以满足整个升降装置 11的上升和下降,金属块的设置将链条20的一端就限制在了箱体21中,避免接机装置12的掉落,也起到了保护的作用。
32.左侧固定板14和右侧固定板15上设有滑轨,接机装置12上设有与滑轨相适配的滑块,这样避免了接机装置12被链条20掉着上升和下降的过程中产生晃动,从而无法和充电仓2对准的情况,这样上升和下降的过程中更加的稳定和顺畅。
33.平稳支撑架9包括固定在所述无人机本体8上的四根支撑柱23,四根支撑柱23的底面处于同一水平面上,其两两之间分别固定有前连接板24、侧连接板25和后连接板26,通过在无人机本体8上的四根支撑柱23,四根支撑柱23形成一个矩形框的位置关系并且四根支撑柱23的底面处于同一水平面上,这样大大增加了平稳支撑架9的稳定性,同时在四根支撑柱23之间设前连接板24、侧连接板25和后连接板26,这样进一步增加了其稳定性,同时方便充电接口10的设置,可以将充电接口10设置在后连接板26上,方便在对正装置5对正的时候推动平稳支撑架9,平稳支撑架9也因此受力均匀。
34.对正装置5包括电机立板27,电机立板27上固定有电机b28,电机b28 的输出轴固定有联轴器29,联轴器29的输出轴连接有右侧校正装置30和左侧校正装置31,右侧校正装置30和左侧校正装置31互为镜像设置,两者之间通过同步杆32连接在一起。
35.右侧校正装置30包括固定在联轴器29输出轴端部的主动轮33,主动轮 33上设有同步带34,同步带34的前端绕在前从动轮35上,其后端绕在后从动轮36上,前从动轮35和后从动轮36上分别固定有丝杠37的一端,丝杠 37的另一端设置在限位座63上,且丝杠37上设有与其相匹配的丝杠螺母38,丝杠螺母38上固定连接有丝杠螺母座39,丝杠螺母座39的顶部固定连接有推板40的端部,丝杠螺母座39上设有感应器41,当无人机7停好之后,电机b28开始启动,其带动主动轮33运转,主动轮33带动前从动轮35和后从动轮36同步运转,前从动轮35和后从动轮36带动丝杠37同步运转,丝杠 37在运转时候带动螺母座39向无人机7方向移动,丝杠螺母座39同时带动推板40向无人机7的方向靠近,由于右侧校正装置30和左侧校
正装置31互为镜像设置,两者之间通过同步杆32连接在一起,这样其左侧的推板40也同步向无人机7的方向靠近,对无人机7的位置进行对正,丝杠螺母座39上的感应器41能够感应左右两侧的丝杠螺母座之间的距离,左右两侧的丝杠螺母座之间的距离正好设置为无人机7对正时两者之间的距离,这样感应器41 在无人机7对正后就会使对正装置停止运行,触发移动充电装置6和充电接口10进行对接,联轴器29的设置可以补偿两轴之间由于制造安装不精确、工作时的变形或热膨胀等原因所发生的偏移(包括轴向偏移、径向偏移、角偏移或综合偏移)以及具有缓和冲击、吸振的作用。
36.联轴器29的输出端穿过右立板42固定有主动轮33,主动轮33的下方设有右辅助轮43,右辅助轮43通过同步杆a45与左辅助轮44连接,同步杆 a45穿出右辅助轮43和左辅助轮44,其两端部分别连接在右立板42和左立板46上,右立板42和左立板46上连接同步杆a45的端部处设有竖直的长条形孔47,右辅助轮43和左辅助轮44的设置可以保证右侧校正装置30和左侧校正装置31运行的稳定性以及确保同步带34的张紧效果,使其在运行的过程中不易松动,长条形孔47的设置就是起到调节作用,在装同步带34的时候,将同步杆a45向上抬至长条形孔47上方,这样使得同步带34长于整个绕行的长度,方便安装同步带34,安装好后,将右辅助轮43和左辅助轮44 下按至长条形孔47的下方,使整个同步带34张紧,这样便于安装,同时也起到了很好的张紧效果,保证运行的稳定性。
37.移动充电装置6包括电机a48,电机a48的输出轴上固定连接有主动轮 a49,主动轮a49上绕有同步带a50的一端,同步带a50的另一端绕在从动轮a51上,从动轮a51的中部固定连接有同步杆b52,同步杆b52的两端部穿过挡板53固定有从动轮b54,从动轮b54上绕有同步带b55的一端,同步带b55的另一端绕有从动轮c56,同步带b55上固定连接有l型折弯板57, l型折弯板57的上端固定有移动杆58的端部,移动杆58上设有与充电接口 10相适配的充电装置,当对正装置5完成对正步骤之后,感应器41将信号发送给移动充电装置6,这时电机a48启动,其输出轴带动主动轮a49转动,主动轮a49带动同步带a50转动,同步带a50带动从动轮a51转动,从动轮 a51带动同步杆b52同步转动,同步杆b52带动从动轮b54同步转动,从动轮b54带动同步带b55同步转动,同步带b55带动从动轮c56同步转动,同步带b55同时带动l型折弯板57向无人机7上的充电接口10方向靠近,l 型折弯板57带动移动杆58向无人机7上的充电接口10方向靠近,直至移动杆58上的充电装置与充电接口10对接上进行充电为止,有了之前的平稳支撑架9和对正装置5做铺垫,移动充电装置6很容易精准地和充电接口10对接上了。
38.挡板53上设有滑轨59,l型折弯板57上设有与滑轨59相适配的滑块 60,这样通过滑轨59和滑块60的设置可以辅助推板40的移动,使得运行更加稳定,l型折弯板57的移动也更加顺畅。
39.推板40的高度在固定座1和平稳支撑架9的高度之间,这样在对正的时候,推板40接触的是平稳支撑架9,不仅方便推动,同时也不会接触无人机7,从而不会对无人机7有触碰损坏。
40.工作原理:当需要对多架无人机7进行充电的时候,无人机7的控制装置(图中未示意)使得无人机7降落在多层充电仓的接机装置12上,由于无人机7上设有平稳支撑架9,其降落后是平稳支撑架9与停机坪4接触,这样解决了传统的无人机直接降落在停机坪上造成的不稳定的问题,平稳支撑架9 很好地保证了无人机7的稳定性,接机装置12的结构和充电
仓2的结构大体相同,其上的推动装置13与移动充电装置6的结构基本一致,只是推动装置 13上没有设置充电装置,只是起到将停在其上的无人机7推到相应的充电仓 2的停机坪4上的作用,接机装置12上设有感应器,当有无人机7停在其上的时候,升降装置11就会启动,使得接机装置12上升或者下降,同时接机装置12上的对正装置5将其对正,在接机装置12升降的过程中,接机装置 12在经过每一层充电仓2的时候,其上的感应器就会感应,如果感应到了有无人机7在充电,那就继续上升或者下降去下一层的充电仓2,如果感应到了没有无人机7在充电,那么推动装置13就会将无人机7推向与其处于同一平面的充电仓2,推入充电仓2之后,充电仓2上的对正装置5对无人机7重新进行对正,对正好之后,移动充电装置6就会向无人机7靠拢,直至与充电接口10对接上,进行充电,当充电完成之后,无人机7就会发出充电完成的信号,这时接机装置12就会接受到信号,升降装置11就会将接机装置12送至充完电的无人机7处,这时无人机7被充电仓2上的移动充电装置6推至接机装置12上的停机坪上,然后无人机7就可以飞走继续执行任务,就这样通过接机装置12在这个多层充电仓上完成了多架无人机7的衔接式充电,大大提高了多架无人机充电的效率,降低了成本,节约了资源,节省了占地面积,如果没有接机装置12,无人机7很难准确地飞入这种多层充电仓,存在着技术壁垒;另外,出于对该无人机充电仓的保护,避免其遭受日晒雨淋等自然条件的影响,可以将整个无人机多层充电仓设置固定在一个保护箱中,保护箱设有自动感应门,当有无人机7靠近的时候感应门自动打开,露出接机装置12,然后完成充电的过程,当充电完成后,无人机7被送走之后,感应门自动关闭,这样形成了很好的保护作用;固定架1上设置的隔离装置可以防止外面无人机的闯入,合法无人机管理,导航装置可以通过北斗系统设立坐标自学习精确导航,视觉装置的设立可以识别码转换指令辅助导航;
41.另外,本发明上还设有巡检导航装置、通讯单元、微气象装置、导航坐标装置、管控单元、仓体装置、声光装置,隔离装置,如图9所示,具体工作原理如下:巡检导航装置连接有通讯单元,通讯单元连接有微气象装置,从而获取天气信息;巡检导航装置连接通讯单元,通讯单元连接管控单元,从而管控起落平台、多层充电停机架、仓体装置、声光装置;巡检导航装置连接通讯单元,通讯单元连接导航坐标装置,其中导航坐标装置中的北斗模块获取经纬度高度坐标,设立坐标,视觉装置设立识别码转换指令辅助导航,自学习巡检位置实现精准导航,隔离模块和中继模块检测、管控导航、隔离装置防止外面无人机闯入,权限隔离内部无人机操作,隔离外内部无人机,与无人机图传、红外线热成像测温、航线学习、巡检等作业;导航坐标装置包括北斗模块、隔离模块、中继模块连接通讯单元,从而上传北斗学习,周围飞行物状况,连接无人机收发航行指令、巡检数据和视频流;管控单元连接声光装置实现声光辅助导航、作业指示、外来飞行物的告警;仓体装置包括环控单元,环境感应器,环境采集器,恒温除湿净化装置,物联门锁;环境感应器包括温湿度感应器,颗粒感应器,盐雾感应器,烟雾感应器视觉感应器,微波雷达感应器,热成像感应器;恒温除湿净化装置,包括盐雾和粉尘净化模块,电子恒温除湿模块,保障机巢内无人机和设备;物联门锁包括管理机巢仓体装置所有的门状态,根据权限开门管控,很好地完成了多架无人机的充电的衔接过程,特别在变电站巡检,安全有效保障电力设施,大大提高了巡检效率,降低了成本,节约了资源,提高安全性。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。