1.本发明涉及一种悬挂装置,尤其涉及一种大型动力平台用四轴多姿态控制悬挂提升装置。
背景技术:
2.悬挂提升装置是大型拖拉机或大型动力平台与作业装置之间的动力传动与姿态调控的关键零部件,在现代农业机械或行走机械作业中具应用广泛。作业过程中动力传动与姿态调控水平与可靠性直接影响作业质量或作业人员的安全。传统大型拖拉机的悬挂提升装置由上拉杆、垂直提升液压缸、提升臂、提升杆、下拉杆组成,作业过程遇到田埂、树根等短期地形突变及阻力突变等情况,不能根据地形对作业机具实时姿态调控,不仅影响作业质量,甚至会损坏作业机具。另外垂直提升液压缸动力传动环节繁琐,姿态控制精度与传动效率较低。
技术实现要素:
3.本发明所要解决的技术问题是提供一种能够适应各种作业状况的大型动力平台用四轴多姿态控制悬挂提升装置。
4.为解决上述技术问题,本发明的技术方案是:大型动力平台用四轴多姿态控制悬挂提升装置,包括铰接在大型动力平台后桥底端与作业机具机架底端之间的左牵引杆和右牵引杆,所述左牵引杆与所述大型动力平台后桥顶端之间铰接有左垂直提升液压缸;所述右牵引杆与所述大型动力平台后桥顶端之间铰接有右垂直提升液压缸;所述作业机具机架的顶部与所述大型动力平台后桥的中部之间铰接有中央拉杆,所述中央拉杆位于所述左垂直提升液压缸和所述右垂直提升液压缸之间;
5.所述左牵引杆的外侧面与所述大型动力平台后桥底端之间铰接有左水平姿态液压缸,所述右牵引杆的外侧面与所述大型动力平台后桥底端之间铰接有右水平姿态液压缸;
6.还包括与所述左水平姿态液压缸、所述右水平姿态液压缸、所述左垂直提升液压缸和所述右垂直提升液压缸的控制端口连接的控制系统。
7.作为一种优选的技术方案,所述左牵引杆的一端与所述作业机具机架铰接,所述左牵引杆的另一端与所述大型动力平台后桥通过球铰连接。
8.作为一种优选的技术方案,所述右牵引杆的一端与所述作业机具机架铰接,所述右牵引杆的另一端与所述大型动力平台后桥通过球铰连接。
9.作为一种优选的技术方案,所述左牵引杆的外侧固定安装有铰接座,所述大型动力平台后桥底端固定安装有铰接座,所述左水平姿态液压缸铰接在两个所述铰接座之间。
10.作为一种优选的技术方案,所述右牵引杆的外侧固定安装有铰接座,所述大型动力平台后桥底端固定安装有铰接座,所述右水平姿态液压缸铰接在两个所述铰接座之间。
11.作为一种优选的技术方案,所述左水平姿态液压缸、所述右水平姿态液压缸、所述
左垂直提升液压缸和所述右垂直提升液压缸均为双作用液压缸。
12.作为一种优选的技术方案,所述左牵引杆和所述作业机具机架之间的连接处安装有轴销式力传感器;所述右牵引杆和所述作业机具机架之间的连接处安装有轴销式力传感器;所述轴销式力传感器的信号输出端与所述控制系统连接。
13.作为一种优选的技术方案,所述控制系统包括控制器,所述控制器的信号输出端与所述左水平姿态液压缸、所述右水平姿态液压缸、所述左垂直提升液压缸和所述右垂直提升液压缸的控制端口连接。
14.作为一种优选的技术方案,所述左水平姿态液压缸、所述右水平姿态液压缸、所述左垂直提升液压缸和所述右垂直提升液压缸均内置有一个位置传感器,所有的所述位置传感器的信号输出端均与所述控制器的信号输入端连接。
15.作为一种优选的技术方案,所述作业机具机架的底端对称安装有两个距离传感器,所述距离传感器的信号输出端均与所述控制器的信号输入端连接。
16.由于采用了上述技术方案,大型动力平台用四轴多姿态控制悬挂提升装置,包括铰接在大型动力平台后桥底端与作业机具机架底端之间的左牵引杆和右牵引杆,所述左牵引杆与所述大型动力平台后桥顶端之间铰接有左垂直提升液压缸;所述右牵引杆与所述大型动力平台后桥顶端之间铰接有右垂直提升液压缸;所述作业机具机架的顶部与所述大型动力平台后桥的中部之间铰接有中央拉杆,所述中央拉杆位于所述左垂直提升液压缸和所述右垂直提升液压缸之间;所述左牵引杆的外侧面与所述大型动力平台后桥底端之间铰接有左水平姿态液压缸,所述右牵引杆的外侧面与所述大型动力平台后桥底端之间铰接有右水平姿态液压缸;还包括与所述左水平姿态液压缸、所述右水平姿态液压缸、所述左垂直提升液压缸和所述右垂直提升液压缸的控制端口连接的控制系统;左右两个垂直提升液压缸直接对牵引杆驱动,实现作业机具的升降,简化传动结构;且两个垂直提升液压缸独立动作,实现作业机具的升降及回转姿态的作业深度横向一致性调整;本悬挂提升装置的水平方向姿态调控机构采用两个水平姿态的水平姿态液压缸构成。
附图说明
17.以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
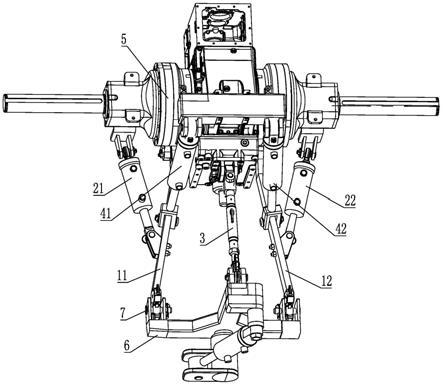
18.图1是本发明实施例的结构示意图;
19.图中:11-左牵引杆;12-右牵引杆;21-左水平姿态液压缸;22-右水平姿态液压缸;3-中央拉杆;41-左垂直提升液压缸;42-右垂直提升液压缸;5-大型动力平台后桥;6-作业机具机架;7-轴销式力传感器。
具体实施方式
20.下面结合附图和实施例,进一步阐述本发明。在下面的详细描述中,只通过说明的方式描述了本发明的某些示范性实施例。毋庸置疑,本领域的普通技术人员可以认识到,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,附图和描述在本质上是说明性的,而不是用于限制权利要求的保护范围。
21.如图1所示,大型动力平台用四轴多姿态控制悬挂提升装置,包括铰接在大型动力平台后桥5底端与作业机具机架6底端之间的左牵引杆11和右牵引杆12,所述左牵引杆11与
所述大型动力平台后桥5顶端之间铰接有左垂直提升液压缸41;所述右牵引杆12与所述大型动力平台后桥5顶端之间铰接有右垂直提升液压缸42;所述作业机具机架6的顶部与所述大型动力平台后桥5的中部之间铰接有中央拉杆3,所述中央拉杆3位于所述左垂直提升液压缸41和所述右垂直提升液压缸42之间;
22.所述左牵引杆11的外侧面与所述大型动力平台后桥5底端之间铰接有左水平姿态液压缸21,所述右牵引杆12的外侧面与所述大型动力平台后桥5底端之间铰接有右水平姿态液压缸22;还包括与所述左水平姿态液压缸21、所述右水平姿态液压缸22、所述左垂直提升液压缸41和所述右垂直提升液压缸42的控制端口连接的控制系统。
23.所述左牵引杆11的一端与所述作业机具机架6铰接,所述左牵引杆11的另一端与所述大型动力平台后桥5通过球铰连接。所述右牵引杆12的一端与所述作业机具机架6铰接,所述右牵引杆12的另一端与所述大型动力平台后桥5通过球铰连接。
24.所述左牵引杆11的外侧固定安装有铰接座,所述大型动力平台后桥5底端固定安装有铰接座,所述左水平姿态液压缸21铰接在两个所述铰接座之间。所述右牵引杆12的外侧固定安装有铰接座,所述大型动力平台后桥5底端固定安装有铰接座,所述右水平姿态液压缸22铰接在两个所述铰接座之间。
25.所述左水平姿态液压缸21、所述右水平姿态液压缸22、所述左垂直提升液压缸41和所述右垂直提升液压缸42均为双作用液压缸。所述左牵引杆11和所述作业机具机架6之间的连接处安装有轴销式力传感器7;所述右牵引杆12和所述作业机具机架6之间的连接处安装有轴销式力传感器7;所述轴销式力传感器7的信号输出端与所述控制系统连接。
26.所述控制系统包括控制器,所述控制器的信号输出端与所述左水平姿态液压缸21、所述右水平姿态液压缸22、所述左垂直提升液压缸41和所述右垂直提升液压缸42的控制端口连接。所述左水平姿态液压缸21、所述右水平姿态液压缸22、所述左垂直提升液压缸41和所述右垂直提升液压缸42均内置有一个位置传感器,所有的所述位置传感器的信号输出端均与所述控制器的信号输入端连接。所述作业机具机架6的底端对称安装有两个距离传感器,所述距离传感器的信号输出端均与所述控制器的信号输入端连接。
27.大型动力平台用四轴多姿态控制悬挂提升装置的工作原理:
28.悬挂提升装置在控制器的控制策略下,控制垂直方向的所述左垂直提升液压缸41和所述右垂直提升液压缸42以及水平姿态的所述左水平姿态液压缸21和所述右水平姿态液压缸22协同控制,以适应不同的作业工况,根据实时作业工况实现大型拖拉机或大型动力平台与作业机之间的动力传动与突变工况多姿态调控。作业过程中,控制器根据作业工况实施调整各个双作用液压缸动作,以保证农机具高质量高效作业。
29.所述左垂直提升液压缸41和所述右垂直提升液压缸42用于作业机具垂直方向升降、绕翻转轴的旋转姿态调节和提升/下降且绕翻转轴的旋转姿态调节三种姿态控制。作业或转场过程中,需要对作业机具垂直提升或下降时,控制器使所述左垂直提升液压缸41和所述右垂直提升液压缸42同时伸缩可以实现作业机具升降;作业过程碰到地面起伏、高低不平时,通过距离传感器采集地面状况传送到控制器,控制器处理信号后控制两个垂直提升液压缸动作,使作业机具实现作业深度横向一致性调整。
30.所述左水平姿态液压缸21和所述右水平姿态液压缸22用于实现作业机具在作业过程中稳定前进或平行于前进方向轻微摆动的左右平移两种姿态控制。在作业过程中,当
作业机具碰到杂草、石块、树根等障碍物使其中一侧阻力突增时,力传感器将信号传送到控制器,为了缓解突增的阻力,两个水平姿态液压缸动作,使作业机具平行于前进方向作轻微摆动的左右平移,经过阻力突变区域后,将水平姿态的两个水平姿态液压缸恢复到调整前位置继续作业,实现作业深度姿态调整。
31.当以上作业工况同时出现时,协同控制多个双作用液压缸动作,保证作业质量和效率。若超出双作用液压缸的调控范围,以保护作业装置优先的控制策略,控制两个垂直提升液压缸动作,使作业装置提升达到保护的目的。
32.本悬挂提升装置的姿态调控均采用带有位置传感器的、可实现闭环控制的、且具有相对位置关系的四支液压缸和相关机构构成,其结构特点如下:
33.1.悬挂提升装置垂直方向的两个垂直提升液压缸直接对两个牵引杆驱动,实现作业机具的升降,简化传动结构。
34.2.采用两个垂直提升液压缸独立液压回路控制,两个互不影响液压回路可以实现两个垂直提升液压缸的独立动作,实现作业机具的升降及回转姿态的犁深横向一致性调整。
35.3、悬挂提升装置中水平方向的姿态调控机构采用两个水平姿态液压缸构成:
36.(1)悬挂提升装置可以采用两个水平姿态双作用液压缸,也可以采用一个水平姿态双作用液压缸、另一侧只用拉杆结构。
37.(2)两个水平姿态双作用液压缸与作业机具牵引杆组成梯形/近平行四边形结构。在水平姿态双作用液压缸的作用下,这种结构可以使作业机具沿着与拖拉机球铰接的瞬心作轻微摆动或左右平移,调节后作业机具与拖拉机仍保持平行。
38.(3)采用两个水平姿态双作用液压缸,可以在控制器的指令下,一个水平姿态双作用液压缸活塞杆伸出,另一个水平姿态双作用液压缸活塞杆做精确地相应收缩,可以实现平行于前进方向摆动的左右平移运动。
39.4、两个垂直提升双作用垂直提升液压缸和两个水平姿态双作用液压缸内均内置磁致伸缩位置传感器,用于检测双作用液压缸活塞杆的位置。
40.5.作业机具机架6下两侧安装距离传感器,用于检测作业机具与地面的距离。
41.6.作业机具机架6与两侧牵引杆连接处使用轴销式力传感器7,用于检测作业机具所受牵引力大小。
42.以上显示和描述了本发明的基本原理、主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。