1.本技术实施例涉及车辆技术领域,尤其涉及一种车辆的控制方法、一种车辆的控制装置和一种车辆。
背景技术:
2.汽车座椅是影响乘坐舒适性的重要部件,一般座椅前后、高低都可以调节,座椅靠背的角度也可以根据乘坐的坐姿需要调整靠背角度,达到乘坐舒适性要求,但是对于头部的支撑的重要部件—头枕,一般是固定式,然而相对不同的人体和同一人体不同的坐姿,对于头枕的相对座椅的位置及高度的需求是不同的,如果头枕不能自适应跟随坐姿变化调整位置及角度,对头部提供有效支撑,会造成坐着舒服,但是颈椎和头部不舒服的情况,现有技术的高度可调节不能满足上述需求。
技术实现要素:
3.本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
4.为此,本发明的第一方面提供了一种车辆的控制方法。
5.本发明的第二方面提供了一种控制装置。
6.本发明的第三方面提供了一种车辆。
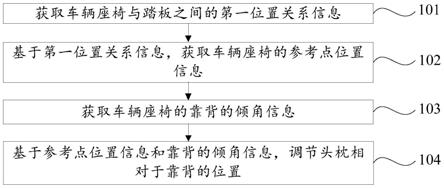
7.有鉴于此,根据本技术实施例的第一方面提出了一种车辆的控制方法,包括:
8.获取所述车辆座椅与所述踏板之间的第一位置关系信息;
9.基于所述第一位置关系信息,获取所述车辆座椅的参考点位置信息;
10.获取所述车辆座椅的所述靠背的倾角信息;
11.基于所述参考点位置信息和所述靠背的倾角信息,调节头枕相对于所述靠背的位置。
12.在一种可行的实施方式中,所述获取所述车辆座椅与所述踏板之间的第一位置关系信息的步骤包括:
13.以所述座椅本体上表面所在的平面为第一基准面,以垂直于所述第一基准面的方向为第一方向,在所述第一方向上确定参考基准面;
14.获取所述踏板的转动中心的第一位置信息、所述踏板的倾角信息和所述踏板的长度信息;
15.将所述第一位置信息与所述参考基准面之间的最短距离,作为第一距离;
16.将所述第一距离、所述转动中心的第一位置信息、所述踏板的倾角信息和所述踏板的长度信息作为所述第一位置信息。
17.在一种可行的实施方式中,所述基于所述第一位置关系信息,获取所述车辆座椅的参考点位置信息的步骤包括:
18.基于所述踏板长度信息,获取所述转动中心与所述踏板根部之间的第二距离;
19.基于所述第一距离、所述第二距离和所述踏板的倾角信息,获取基准垂直距离;
20.基于所述基准垂直距离,在所述参考基准面上获取参考点位置信息。
21.在一种可行的实施方式中,所述基于所述第一距离、所述第二距离和所述踏板的倾角信息,获取基准垂直距离的步骤包括:
22.通过下式求取所述基准垂直距离:
23.a=a+b*z-c*z2ꢀꢀꢀꢀ
(1)
24.b=z-d*sin(γ)
ꢀꢀꢀꢀꢀꢀ
(2)
25.其中,a为第一距离,a为常数取值为692.6至936.6,b为常数取值为0.613至0.9814,c为常数取值为0.0018至0.0023,z为参考点位置与所述踏板之间的最大垂直距离,b为基准垂直距离,d为第二距离,γ为所述踏板的倾角信息。
26.在一种可行的实施方式中,所述基于所述参考点位置信息和所述靠背的倾角信息,调节所述头枕相对于所述靠背的位置的步骤包括:
27.基于所述参考点位置信息获取臀高信息、坐高信息和颈椎高度信息;
28.基于所述臀高信息、所述坐高信息、所述颈椎高度信息和所述靠背的倾角信息,调节所述头枕的初步高度;
29.对所述头枕的倾角进行初步调节,使得所述头枕的倾角与所述座椅本体之间的夹角为80
°
至100
°
。
30.在一种可行的实施方式中,所述基于所述臀高信息、坐高信息和颈椎高度信息,调节所述头枕的初步高度的步骤包括:
31.调节所述头枕的初步高度,使得所述头枕的位置信息满足如下公式:
32.l=(ht-hc)/2*cosθ+hc-hb
ꢀꢀꢀꢀ
(3)
33.其中,l为头枕中心与参考点位置信息之间的距离,ht为坐高信息,hc为颈椎高度信息,hb为臀高信息,θ为靠背的倾角信息。
34.在一种可行的实施方式中,所述控制方法还包括:
35.获取座椅本体的第一弹性系数信息和所述座椅本体的第一压力信息;
36.基于所述第一压力信息和所述第一弹性系数信息,获取二次调节高度信息;
37.基于所述二次调节高度信息调节所述头枕的高度;
38.获取所述头枕的第二弹性系数信息和所述头枕的第二压力信息;
39.基于所述第二压力信息和所述第二弹性系数信息,获取二次调节角度信息;
40.基于所述二次调节角度信息调节所述头枕的高度。
41.根据本技术实施例的第二方面提出了一种控制装置,其特征在于,包括:
42.存储器,存储有计算机程序;
43.处理器,执行所述计算机程序;
44.其中,所述处理器在执行所述计算机程序时,实现上述任一技术方案所述的控制方法。
45.根据本技术实施例的第三方面提出了一种车辆,包括:
46.如上述技术方案所述的控制装置;
47.车辆本体;
48.车辆座椅,可移动地设置在所述车辆本体内;
49.踏板,设置在所述车辆本体内;
50.第一位移传感器,设置在所述车辆座椅上,用于获取所述车辆座椅与所述踏板之间的距离。
51.在一种可行的实施方式中,车辆还包括:
52.第一压力传感器,设置在所述头枕内;
53.第二压力传感器,设置在所述座椅本体之内;
54.第一倾角传感器,连接于所述靠背,用于获取所述靠背相对于所述座椅本体的倾角信息;
55.第二倾角传感器,连接于所述头枕,用于获取所述头枕相对于所述靠背的倾角信息;
56.第一驱动电机,连接于所述头枕,用于驱动所述头枕相对于所述靠背转动;
57.第二驱动电机,连接于所述头枕,用于驱动所述头枕靠近或远离于所述靠背;
58.第一位移传感器,设置在所述靠背上,用于检测所述头枕与所述靠背之间的距离。
59.相比现有技术,本发明至少包括以下有益效果:本技术实施例提供的车辆的控制方法,先获取车辆的座椅与踏板之间的第一位置关系,通过第一位置关系可以表征坐在车辆座椅上的用户的体态,然后基于第一位置关系确定参考点位置信息,使得参考点位置信息能够适配于用户的体态,而后在获取到靠背的倾角信息,靠背的倾角信息可以表征用户的坐姿,最后再结合参考点位置信息和靠背的倾角信息,来调节头枕的位置,使得头枕的位置能够适配于用户的体态和坐姿,使得头枕的支撑效果更佳,能够对用户的头部进行有效支撑,提高用户的舒适度,提高用户体验。
附图说明
60.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本技术的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
61.图1为本技术提供的一种实施例的车辆的控制方法的示意性步骤流程图;
62.图2为本技术提供的一种实施例的车辆的控制方法的位置关系示意图;
63.图3为本技术提供的一种实施例的控制装置的结构框图。
具体实施方式
64.为了更好的理解上述技术方案,下面通过附图以及具体实施例对本技术实施例的技术方案做详细的说明,应当理解本技术实施例以及实施例中的具体特征是对本技术实施例技术方案的详细的说明,而不是对本技术技术方案的限定,在不冲突的情况下,本技术实施例以及实施例中的技术特征可以相互组合。
65.根据本技术实施例的第一方面提出了一种车辆的控制方法,包括:
66.步骤101:获取车辆座椅与踏板之间的第一位置关系信息。可以理解的是,车辆座椅相对于踏板之间的位置是可调节的,在用户坐在车辆座椅之上时,用户可以调节车辆座椅的位置,进而调节车辆座椅与踏板之间的距离,使得驾驶操作或乘坐更加舒适,因此第一位置关系信息可以是动态的,该第一位置关系随着用户对车辆座椅的调节改变而改变。
67.可以理解的是,踏板可以为油门踏板也可以为刹车踏板,踏板的具体类型不申请
不做限定,油门踏板和刹车踏板相对于车辆的位置关系是固定的,只需要设置一个位移传感器即可获知到车辆座椅与踏板之间的第一位置关系信息。
68.步骤102:基于第一位置关系信息,获取车辆座椅的参考点位置信息。可以理解的是,第一位置关系信息可以是基于用户对车辆座椅位置进行调节之后的车辆座椅位置来获取的,因此第一位置关系信息可以表征用户的体态,例如用户身高越高则车辆座椅与踏板之间的距离应当越大,用户的身高越小则车辆座椅与踏板之间的距离应当越小,因此可以基于第一位置关系信息来确定车辆座椅的参考位置信息,该参考位置信息可以表征用户坐在车辆座椅上时用户臀部高度方向的中心点与车辆座椅的座椅表面之间的最短距离。
69.步骤103:获取车辆座椅的靠背的倾角信息。可以理解的是,靠背的倾角信息可以表征用户的坐姿。
70.步骤104:基于参考点位置信息和靠背的倾角信息,调节头枕相对于靠背的位置。基于参考点位置信息和靠背的倾角信息来调节头枕的位置,使得头枕的位置适配于用户的体态和坐姿,使得头枕设置位置更加恰当,使得用户的舒适度能够提高。可以理解的是,调节头枕的位置可以包括调节头枕的有效高度和头枕的倾角。
71.本技术实施例提供的车辆的控制方法,先获取车辆的座椅与踏板之间的第一位置关系,通过第一位置关系可以表征坐在车辆座椅上的用户的体态,然后基于第一位置关系确定参考点位置信息,使得参考点位置信息能够适配于用户的体态,而后在获取到靠背的倾角信息,靠背的倾角信息可以表征用户的坐姿,最后再结合参考点位置信息和靠背的倾角信息,来调节头枕的位置,使得头枕的位置能够适配于用户的体态和坐姿,使得头枕的支撑效果更佳,能够对用户的头部进行有效支撑,提高用户的舒适度,提高用户体验。
72.通过本技术实施例提供的控制方法,在用户坐在车辆座椅之上时,用户可能对车辆座椅的位置和靠背角度进行调节,因此第一位置关系信息和靠背的倾角信息可以是动态变化的,而当第一位置关系信息和靠背的倾角信息产生变化时,通过本技术实施例提供的控制方法可以调节头枕的位置,使得头枕的位置能够适配于第一位置关系信息和靠背的倾角信息,既头枕的位置可以随着第一位置关系信息和/或靠背的倾角信息的改变而改变,使得头枕的位置调节能够实现自动化,调节更加方便。
73.在一些示例中,获取车辆座椅与踏板之间的第一位置关系信息的步骤包括:以座椅本体上表面所在的平面为第一基准面,以垂直于第一基准面的方向为第一方向,在第一方向上确定参考基准面;获取踏板的转动中心的第一位置信息、踏板的倾角信息和踏板的长度信息;将第一位置信息与参考基准面之间的最短距离,作为第一距离;将第一距离、转动中心的第一位置信息、踏板的倾角信息和踏板的长度信息作为第一位置信息。
74.可以理解的是,第一位置关系信息的采集是为了明确参考点位置信息,而参考点位置信息的变化主要体现在用户坐在车辆座椅上时用户臀部高度方向的中心点与车辆座椅的座椅表面之间的最短距离,而用户臀部的中心点与靠背之间的距离相对较为固定,因此可以对用户坐在车辆座椅之上时,对用户臀部高度方向的中心点与车辆靠背之间的最短距离进行统计,基于统计结果来确定参考基准面,参考基准面与靠背之间的距离通常介于15cm至30cm之间,该取值范围适配于人类的通用体型。
75.在明确了参考基准面之后,为了确定参考点位置信息,可以对踏板的转动中心的第一位置信息、踏板的倾角信息和踏板的倾角信息进行采集,进一步计算获取第一位置信
息与参考基准面之间的最短距离,将该最短距离作为第一距离。
76.如图2所示,其中边长hd即为第一距离。
77.进一步地,在基于第一距离、转动中心的第一位置信息、踏板的倾角信息和踏板的长度信息即可确定参考点位置信息。
78.在一些示例中,基于第一位置关系信息,获取车辆座椅的参考点位置信息的步骤包括:基于踏板长度信息,获取转动中心与踏板根部之间的第二距离;基于第一距离、第二距离和踏板的倾角信息,获取基准垂直距离;基于基准垂直距离,在参考基准面上获取参考点位置信息。
79.在明确了参考基准面之后,由于踏板的转动中心是固定不变的,因此在车辆座椅的第一位置关系信息不变的情况下,参考基准面与转动中心之间的第一距离是固定不变的,在基于第一距离、第二距离和踏板的倾角信息利用三角函数即可求取到参考点位置信息与转动中心之间的垂直距离,该垂直距离即为基准垂直距离,再基于基准垂直距离即可在参考基准面上获取参考点位置信息。
80.在一些示例中,基于第一距离、第二距离和踏板的倾角信息,获取基准垂直距离的步骤包括:
81.通过下式求取基准垂直距离:
82.a=a+b*z-c*z2ꢀꢀꢀꢀ
(1)
83.b=z-d*sin(γ)
ꢀꢀꢀꢀꢀꢀ
(2)
84.其中,a为第一距离,a为常数取值为692.6至936.6,b为常数取值为0.613至0.9814,c为常数取值为0.0018至0.0023,z为参考点位置与踏板之间的最大垂直距离,b为基准垂直距离,d为第二距离,γ为踏板的倾角信息。
85.在该技术方案中,进一步明确了基准垂直距离的求取方式,使得基准垂直距离的计算更加准确、快捷,其中abc均为常数,abc的取值与人体百分位相关,b和c的取值与a呈负相关。
86.如图2所示,边长pa即为第二距离,边长hb即为参考点位置与所述踏板之间的最大垂直距离z,边长dp即为基准垂直距离b,边pa与边ab形成的锐角即为踏板的倾角信息γ,h点所在位置即为参考点位置。
87.在一些示例中,基于参考点位置信息和靠背的倾角信息,调节头枕相对于靠背的位置的步骤包括:基于参考点位置信息获取臀高信息、坐高信息和颈椎高度信息;基于臀高信息、坐高信息、颈椎高度信息和靠背的倾角信息,调节头枕的初步高度;对头枕的倾角进行初步调节,使得头枕的倾角与座椅本体之间的夹角为80
°
至100
°
。
88.在明确了参考点位置信息之后,可以基于参考点位置信息获取对用户的体态进行预估,获取到对用户预估的臀高信息、坐高信息和颈椎高度信息,再基于臀高信息、坐高信息和颈椎高度信息和靠背的倾角信息来调节头枕的高度,使得头枕的高度能够适配于用户的体态和坐姿,使得用户的舒适度更高。
89.通过本技术实施例提供的控制方法可以基于第一位置关系信息来确定参考点位置信息,再基于参考点位置信息来确定臀高信息、坐高信息和颈椎高度信息,无需对用户进行图像采集,即可基于用户的体态和坐姿来调节头枕的位置,能够保护用户的隐私。
90.对头枕的倾角进行初步调节,使得头枕的倾角与座椅本体之间的夹角为80
°
至
100
°
,能够使用户的头部与头枕之间趋近于垂直,能够更好地支撑用户的头部。
91.在一些示例中,基于臀高信息、坐高信息和颈椎高度信息,调节头枕的初步高度的步骤包括:
92.调节头枕的初步高度,使得头枕的位置信息满足如下公式:
93.l=(ht-hc)/2*cosθ+hc-hb
ꢀꢀꢀꢀ
(3)
94.其中,l为头枕中心与参考点位置信息之间的距离,ht为坐高信息,hc为颈椎高度信息,hb为臀高信息,θ为靠背倾角。
95.如图2所示,边长hc即为颈椎高度,边长ht即为坐高,边长hz即为臀高。
96.通过上式确定得头枕的高度,使得头枕能够更好地支撑用户的头部,使得用户更加舒适。
97.在一些示例中,控制方法还包括:获取座椅本体的第一弹性系数信息和座椅本体的第一压力信息;基于第一压力信息和第一弹性系数信息,获取二次调节高度信息;基于二次调节高度信息调节头枕的高度。
98.在对头枕的高度进行初步调节之后,还可以对座椅本体弹性系数和座椅本体受到的压力进行采集,第一弹性系数信息和第一压力信息可以表征用户的体态,可以以第一压力信息和第一弹性系数信息为参数确定二次调节的高度信息,并基于二次调节高度信息对头枕的高度进行精确调节,使得头枕对用户的支撑效果更佳。
99.在一些示例中,可以通过下式确定二次调节高度信息:
100.δh1=(g
1-g01)/k1ꢀꢀꢀꢀ
(4)
101.其中,δh1为二次调节高度信息,g1为第一压力信息,k1为第一弹性系数信息,g01为第一预设压力值,取值为65kg至75kg。
102.通过上述公式的确定,使得二次调节高度信息的确定更加准确。
103.在一些示例中,获取头枕的第二弹性系数信息和头枕的第二压力信息;基于第二压力信息和第二弹性系数信息,获取二次调节角度信息;基于二次调节角度信息调节头枕的高度。
104.在对头枕的角度进行初步调节之后,还可以对头枕的弹性系数和头枕受到的压力进行采集,第二压力信息和第二弹性系数信息可以表征用户的坐姿,可以以第二压力信息和第二弹性系数信息为参数确定二次调节角度信息,并基于二次调节角度信息对头枕的角度进行精确调节,使得头枕对用户的支撑效果更佳。
105.在一些示例中,可以通过下式确定二次调节高度信息:
106.δh2=(g
2-g02)/k2ꢀꢀꢀꢀ
(4)
107.其中,δh2为二次调节角度信息,g2为第二压力信息,k2为第二弹性系数信息,g02为第二预设压力值,取值为4kg至6kg。
108.通过上述公式的确定,使得二次调节角度信息的确定更加准确。
109.如图3所示,根据本技术实施例的第二方面提出了一种控制装置,包括:存储器301,存储有计算机程序;处理器302,执行计算机程序;其中,处理器302在执行计算机程序时,实现上述任一技术方案的控制方法。
110.本技术实施例提供的控制装置,先获取车辆的座椅与踏板之间的第一位置关系,通过第一位置关系可以表征坐在车辆座椅上的用户的体态,然后基于第一位置关系确定参
考点位置信息,使得参考点位置信息能够适配于用户的体态,而后在获取到靠背的倾角信息,靠背的倾角信息可以表征用户的坐姿,最后再结合参考点位置信息和靠背的倾角信息,来调节头枕的位置,使得头枕的位置能够适配于用户的体态和坐姿,使得头枕的支撑效果更佳,能够对用户的头部进行有效支撑,提高用户的舒适度,提高用户体验。
111.通过本技术实施例提供的控制装置,在用户坐在车辆座椅之上时,用户可能对车辆座椅的位置和靠背角度进行调节,因此第一位置关系信息和靠背的倾角信息可以是动态变化的,而当第一位置关系信息和靠背的倾角信息产生变化时,通过本技术实施例提供的控制方法可以调节头枕的位置,使得头枕的位置能够适配于第一位置关系信息和靠背的倾角信息,既头枕的位置可以随着第一位置关系信息和/或靠背的倾角信息的改变而改变,使得头枕的位置调节能够实现自动化,调节更加方便。
112.根据本技术实施例的第三方面提出了一种车辆,包括:如上述技术方案的控制装置;车辆本体;车辆座椅,可移动地设置在车辆本体内;踏板,设置在车辆本体内;第一位移传感器,设置在车辆座椅上,用于获取车辆座椅与踏板之间的距离。
113.本技术实施例提供的车辆,可以通过控制装置,先获取车辆的座椅与踏板之间的第一位置关系,通过第一位置关系可以表征坐在车辆座椅上的用户的体态,然后基于第一位置关系确定参考点位置信息,使得参考点位置信息能够适配于用户的体态,而后在获取到靠背的倾角信息,靠背的倾角信息可以表征用户的坐姿,最后再结合参考点位置信息和靠背的倾角信息,来调节头枕的位置,使得头枕的位置能够适配于用户的体态和坐姿,使得头枕的支撑效果更佳,能够对用户的头部进行有效支撑,提高用户的舒适度,提高用户体验。
114.本技术实施例提供的车辆,在用户坐在车辆座椅之上时,用户可能对车辆座椅的位置和靠背角度进行调节,因此第一位置关系信息和靠背的倾角信息可以是动态变化的,而当第一位置关系信息和靠背的倾角信息产生变化时,通过本技术实施例提供的控制方法可以调节头枕的位置,使得头枕的位置能够适配于第一位置关系信息和靠背的倾角信息,既头枕的位置可以随着第一位置关系信息和/或靠背的倾角信息的改变而改变,使得头枕的位置调节能够实现自动化,调节更加方便。
115.在一些示例中,车辆还包括:第一压力传感器,设置在头枕内;第二压力传感器,设置在座椅本体之内;第一倾角传感器,连接于靠背,用于获取靠背相对于座椅本体的倾角信息;第二倾角传感器,连接于头枕,用于获取头枕相对于靠背的倾角信息;第一驱动电机,连接于头枕,用于驱动头枕相对于靠背转动;第二驱动电机,连接于头枕,用于驱动头枕靠近或远离于靠背;第一位移传感器,设置在靠背上,用于检测头枕与靠背之间的距离。
116.车辆还包括了第一压力传感器,车辆的控制装置可以通过第一压力传感器获取到第二压力信息。
117.车辆还包括了第二压力传感器,车辆的控制装置可以通过第二压力传感器获取到第一压力信息。
118.车辆还包括了第一倾角传感器,车辆的控制装置可以通过第一倾角传感器获取到靠背的倾角信息。
119.车辆还包括了第二倾角传感器,车辆的控制装置可以通过第二倾角传感器取到头枕的倾角信息,以调节头枕的倾角使得头枕。
120.车辆还包括了第一位移传感器,车辆的控制装置可以通过第一位移传感器获取到第一位置关系信息。
121.通过第一驱动电机和第二驱动电机的设置,可以调节头枕的有效高度和倾角。
122.在本发明中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
123.本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
124.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
125.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。