1.本实用新型涉及物流配送装置领域,具体是一种可自动装卸的货箱。
背景技术:
2.随着快递运输行业的发展,快递从业人员的短缺问题越来越严重,使用无人物流车是未来快递、物流的主要发展方向。
3.公开号为cn107253601a,名称为“快递自存取式新型蜂巢无人车”的专利,公开了一种快递自存取式新型蜂巢无人车,包括旋转式货物存储系统、设置于所述旋转式货物存储系统的可开闭式舱门、用于将从可开闭式舱门滑出的快件运输到取件口的底部出件输送机构、用于将从存件口存入的快件送入所述旋转式货物存储系统的顶部存件机构;所述的旋转式货物存储系统包括中空筒、分布在所述中空筒外圆的快件存放隔间、外套于所述中空筒的壳体以及用于驱动所述中空筒绕轴线自转的旋转驱动机构;所述可开闭式舱门设置于所述壳体底部。
4.上述技术中公开的快递车其主要是固定式快递柜,和快递车是一体的,快递未配送完成时,快递车是不能离开的,这就降低了快递配送效率。
5.要提升快递配送效率,则必须改变目前的快递柜与快递车结合方式,通过将快递柜和快递车分离的方式,实现快递柜的可移动化和快递车的高效运营。另外,要实现无人化物流,大幅度降低无人快递车的运营成本是关键,而通过车厢可分离模式,通过自动装卸箱,提升无人快递车的使用效率,是一种可行的方式,基于上述目的,本实用新型提出一种可自动装卸的货柜。
技术实现要素:
6.针对背景技术中指出的现有快递柜配送效率低、人工成本高的缺陷,本实用新型提出一种可自动装卸的货箱,旨在通过自动控制的方式实现快递柜与快递车的分离、进而实现无人化物流,大幅度降低快递成本的目的。
7.本实用新型解决上述技术问题的技术方案如下:
8.一种可自动装卸的货箱,包括货柜本体及设置于货柜本体下方四角的可伸缩支撑结构、设置于货柜本体正面的收发快递操作面板、与所述收发快递操作面板连接的控制系统,所述控制系统设置于货柜本体内部;
9.所述货柜本体正面设置有货柜格子门,所述控制系统能够根据接收的指令控制相应的货柜格子门进行开关;所述可伸缩支撑结构能够在控制系统控制下进行升降,进而带动货柜本体升降以便实现自动装卸;
10.在上述的可自动装卸的货箱的优选技术方案中,所述可伸缩支撑结构包括运动机构总成,所述运动机构总成包括位于货柜本体前后两侧的横向电动推杆、上下方向电动推杆和直线导轨,所述横向电动推杆与直线导轨配合实现往复直线运动;所述横向电动推杆连接上下方向电动推杆,所述的横向电动推杆和上下方向电动推杆与货柜本体内的控制系
统连接;其中所述直线导轨的导轨和滑块通过螺栓固定于货柜本体上;
11.在上述的可自动装卸的货箱的优选技术方案中,所述的控制系统包括控制器及与所述控制器连接的无线收发模块,所述无线收发模块接收外部指令来控制可伸缩支撑结构工作;
12.在上述的可自动装卸的货箱的优选技术方案中,所述运动机构总成数量为四个,每个运动机构总成均包括一个横向电动推杆和一个上下方向电动推杆,其中横向电动推杆的端部与上下方向电动推杆的中部连接,每个上下方向电动推杆的两端均与一个直线导轨连接;
13.在上述的可自动装卸的货箱的优选技术方案中,所述横向电动推杆通过螺栓固定于货柜本体上;
14.在上述的可自动装卸的货箱的优选技术方案中,所述运动机构总成设置于快递柜本体前后两端的外侧,所述快递柜本体前后两端竖向设置有用于遮挡的伸缩门,所述伸缩门固定于上下方向电动推杆的外侧并随着上下方电动推杆打开和关闭。
15.在上述的可自动装卸的货箱的优选技术方案中,所述可伸缩支撑结构还包括设置于上下方向电动推杆下端的导向定位块;
16.在上述的可自动装卸的货箱的优选技术方案中,所述货柜本体的侧面下方设置有电池仓,所述电池仓内设置有快换电池包,所述快换电池包为整个货箱供电;
17.本实用新型的有益效果是:通过快递柜本体和可收放支撑机构,与具备自动驾驶功能的无人车配合,可实现快递柜的自动装载和自动卸载,从而将无人车从等待收件人的状态中解放出来,提升无人车的使用效率,从而大大提高快递配送效率。
附图说明
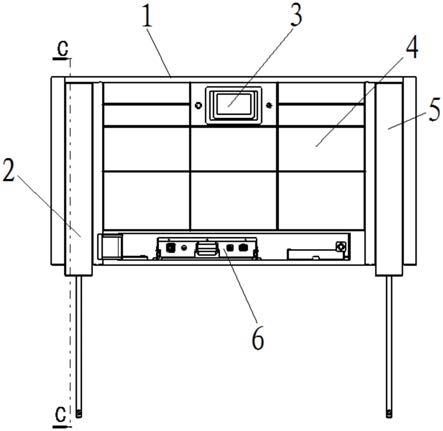
18.图1为本实用新型整体结构示意图;
19.图2为本实用新型图1的c-c剖面结构示意图;
20.图3为本实用新型自动装卸流程示意图;
21.附图标记说明书如下:
22.1、货柜本体,2、可伸缩支撑结构,3、收发快递操作面板,4、货柜格子门,5、伸缩门,6、快换电池包,21、横向电动推杆,22、上下方向电动推杆,23、导轨,24、滑块,25、导向定位块;
具体实施方式
23.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
24.具体的,如图1所示,一种可自动装卸的货箱,包括货柜本体1及设置于货柜本体下方四角的可伸缩支撑结构2、设置于货柜本体正面的收发快递操作面板3、与所述收发快递操作面板连接的控制系统,所述控制系统设置于货柜本体内部;
25.所述货柜本体正面设置有货柜格子门4,所述控制系统能够根据接收的指令控制相应的货柜格子门进行开关;所述可伸缩支撑结构能够在控制系统控制下进行升降,进而带动货柜本体升降以便实现自动装卸;
26.优选的,如图2所示,上述的可伸缩支撑结构包括运动机构总成,所述运动机构总成包括位于货柜本体前后两侧的横向电动推杆21、上下方向电动推杆22和直线导轨,所述横向电动推杆与直线导轨配合实现往复直线运动;所述横向电动推杆连接上下方向电动推杆,所述的横向电动推杆和上下方向电动推杆与货柜本体内的控制系统连接;其中所述直线导轨的导轨23和滑块24通过螺栓固定于货柜本体上;
27.其中,所述的控制系统包括控制器及与所述控制器连接的无线收发模块,所述无线收发模块接收外部指令来控制可伸缩支撑结构工作;
28.此处的外部指令包括但不限于来自运营中心的指令;
29.本实用新型提供的一种可自动装卸的货箱应用于自动驾驶物流车,具体使用时,如图3所示,通过无人驾驶系统控制从始发点至目的地完成停靠后,自动驾驶物流车通过无线网络发送指令给货箱本体内的控制系统,控制系统收到信号后,触发横向电动推杆伸出,进而带动上下方向电动推杆沿导轨推出,当横向电动推杆动作完成后,触发上下方向电动推杆工作,上下方向电动推杆将货箱本体撑起到与自动驾驶物流车有安全的距离后,货箱本体的控制系统通过无线网络发送指令给自动驾驶物流车,自动驾驶物流车往前驶离货箱本体,自动驾驶物流车便可通过与卸载车厢相反的指令去运载其他货箱。
30.在另一个优选实施例中,如图2所示,所述运动机构总成数量为四个,每个运动机构总成均包括一个横向电动推杆和一个上下方向电动推杆,其中横向电动推杆的端部与上下方向电动推杆的中部连接,每个上下方向电动推杆的两端均与一个直线导轨连接;
31.优选的,所述横向电动推杆通过螺栓固定于货柜本体上;
32.优选的,如图2所示,所述运动机构总成设置于快递柜本体前后两端的外侧,所述快递柜本体前后两端竖向设置有用于遮挡的伸缩门5,所述伸缩门固定于上下方向电动推杆的外侧并随着上下方电动推杆打开和关闭。
33.通过这样的设置带来一个好处就是,可以灵活对现有的快递柜进行改装或者使得不同的快递柜适应不同的装卸车辆,通过更换或者改变横向电动推杆的行程来适应不同装卸车辆的宽度。
34.优选的,如图2所示,所述可伸缩支撑结构还包括设置于上下方向电动推杆下端的导向定位块25;
35.在一个优选的实施例中,所述货柜本体的侧面下方设置有电池仓,所述电池仓内设置有快换电池包6,所述快换电池包为整个货箱供电;
36.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。