一种直线往复式rgv曲线调速方法及系统
技术领域
1.本发明涉及有轨车辆技术领域,特别是涉及一种直线往复式rgv曲线调速方法及系统。
背景技术:
2.近年来,随着业界机械自动化水平的不断提高,有轨制导车辆(rail guided vehicle,简称rgv)开始在物流行业扮演举足轻重的角色,现有的直线往复式rgv控制方法通常基于控制器定位和驱动器定位两种方式。
3.控制器定位优势在于驱动系统不需要选用高性能带定位功能的驱动器,控制器通过固定插补周期将速度设定值刷新给驱动,位置反馈的传感器自然不受驱动限制,总体成本较低。缺点是程序较为复杂,对控制器性能要求较高,且由于控制器本身限制,最终定位通过爬行实现,无法实现0速停机,且现有的都为分段计算,连接点不可导,速度有突变。
4.驱动器定位优势在于控制程序相对简单,只需要程序给定目标位置及速度便可实现定位功能,且最终可实现0速停机。缺点在于由于需要配合驱动器进行位置计算,位置反馈传感器大都需要选择ssi总线等类似协议版本,外加驱动器本身成本,总体成本偏高。
技术实现要素:
5.有鉴于此,本发明提供了一种直线往复式rgv曲线调速方法及系统,在保证曲线功能的前提下,尽可能释放控制器性能资源占用,以降低控制器成本。
6.为实现上述目的,本发明提供了如下方案:
7.一种直线往复式rgv曲线调速方法,包括:
8.获取起点位置和终点位置,进一步得到行程值;
9.对所述行程值与曲线设定值比较,若所述行程值小于所述曲线设定值,则控制rgv爬行;若所述行程值大于或等于所述曲线设定值,则执行下述步骤;
10.基于最大行驶速度、加速度和所述行程值进行梯形加减法运算得到梯形运行曲线;
11.对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶。
12.优选地,所述方法还包括:
13.当基于所述余弦运行曲线控制rgv行驶时,实时获取运行误差值,基于所述运行误差值对rgv进行pid调节。
14.优选地,所述基于加速度、所述起点位置和所述终点位置进行梯形加减法运算得到梯形运行曲线,具体为:
15.基于最大行驶速度和所述加速度得到第一加速行驶时间,进一步得到第一加速行驶位移;
16.对所述第一加速行驶位移和所述行程值进行判断;
17.当两倍所述第一加速行驶位移大于所述行程值时,确定rgv行驶分为加速阶段、匀速阶段和减速阶段,基于所述最大行驶速度、所述行程值和所述加速度,采用梯形加减法确定第一加速曲线、匀速曲线和第一减速曲线,进而得到第一梯形图;
18.当两倍所述第一加速行驶位移等于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述最大行驶速度、所述第一加速行驶位移和所述加速度,采用梯形加减法确定第二加速曲线和和第二减速曲线,进而得到第二梯形图;
19.当两倍所述第一加速行驶位移小于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述行程值确定第二加速行驶位移,基于所述第二加速行驶位移和所述加速度,采用梯形加减法确定第三加速曲线和第三减速曲线,进而得到第三梯形图;所述梯形运行曲线为所述第一梯形图、所述第二梯形图或所述第三梯形图。
20.优选地,所述对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶,具体为:
21.当两倍所述第一加速行驶位移大于所述行程值时,对所述第一梯形图进行余弦拟合得到第一余弦图;
22.当两倍所述第一加速行驶位移等于所述行程值时,对所述第二梯形图进行余弦拟合得到第二余弦图;
23.当两倍所述第一加速行驶位移小于所述行程值时,对所述第三梯形图进行余弦拟合得到第三余弦图;所述余弦运行曲线为所述第一余弦图、所述第二余弦图或所述第三余弦图;
24.基于所述余弦运行曲线控制rgv行驶。
25.本发明还提供了一种直线往复式rgv曲线调速系统,包括:
26.行程值模块,用于获取起点位置和终点位置,进一步得到行程值;
27.判断模块,用于对所述行程值与曲线设定值比较,若所述行程值小于所述曲线设定值,则控制rgv爬行;若所述行程值大于或等于所述曲线设定值,则执行梯形运算模块;
28.所示梯形运算模块用于基于最大行驶速度、加速度和所述行程值进行梯形加减法运算得到梯形运行曲线;
29.余弦运算模块,用于对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶。
30.优选地,所述系统还包括:
31.pid调节模块,用于当基于所述余弦运行曲线控制rgv行驶时,实时获取运行误差值,基于所述运行误差值对rgv进行pid调节。
32.优选地,所述梯形运算模块,具体为:
33.基于最大行驶速度和所述加速度得到第一加速行驶时间,进一步得到第一加速行驶位移;
34.对所述第一加速行驶位移和所述行程值进行判断;
35.当两倍所述第一加速行驶位移大于所述行程值时,确定rgv行驶分为加速阶段、匀速阶段和减速阶段,基于所述最大行驶速度、所述行程值和所述加速度,采用梯形加减法确定第一加速曲线、匀速曲线和第一减速曲线,进而得到第一梯形图;
36.当两倍所述第一加速行驶位移等于所述行程值时,确定rgv行驶分为加速阶段和
减速阶段,基于所述最大行驶速度、所述第一加速行驶位移和所述加速度,采用梯形加减法确定第二加速曲线和和第二减速曲线,进而得到第二梯形图;
37.当两倍所述第一加速行驶位移小于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述行程值确定第二加速行驶位移,基于所述第二加速行驶位移和所述加速度,采用梯形加减法确定第三加速曲线和第三减速曲线,进而得到第三梯形图;所述梯形运行曲线为所述第一梯形图、所述第二梯形图或所述第三梯形图。
38.优选地,所述余弦运算模块,具体为:
39.当两倍所述第一加速行驶位移大于所述行程值时,对所述第一梯形图进行余弦拟合得到第一余弦图;
40.当两倍所述第一加速行驶位移等于所述行程值时,对所述第二梯形图进行余弦拟合得到第二余弦图;
41.当两倍所述第一加速行驶位移小于所述行程值时,对所述第三梯形图进行余弦拟合得到第三余弦图;所述余弦运行曲线为所述第一余弦图、所述第二余弦图或所述第三余弦图;
42.基于所述余弦运行曲线控制rgv行驶。
43.根据本发明提供的具体实施例,本发明公开了以下技术效果:
44.本发明涉及一种直线往复式rgv曲线调速方法及系统,首先获取起点位置和终点位置,进一步得到行程值;然后对所述行程值与曲线设定值比较,若所述行程值小于所述曲线设定值,则控制rgv爬行;若所述行程值大于或等于所述曲线设定值,则基于最大行驶速度、加速度和所述行程值进行梯形加减法运算得到梯形运行曲线;对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶。本发明基于余弦曲线确定rgv连续可导的行驶速度规划,提高了rgv行驶的流畅性,同时降低了对控制器的性能需求。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
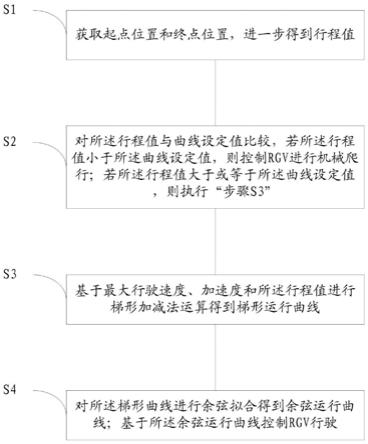
46.图1为本发明直线往复式rgv曲线调速方法流程图;
47.图2为本发明第一梯形图和第一余弦图示意图;
48.图3为本发明第三梯形图和第三余弦图示意图;
49.图4为本发明直线往复式rgv曲线调速系统结构图。
50.符号说明:1-行程值模块,2-判断模块,3-梯形运算模块,4-余弦运算模块。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.本发明的目的是提供一种直线往复式rgv曲线调速方法及系统,在保证曲线功能的前提下,尽可能释放控制器性能资源占用,以降低控制器成本。
53.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
54.图1为本发明直线往复式rgv曲线调速方法流程图。如图所示,本发明提供了一种直线往复式rgv曲线调速方法,包括:
55.步骤s1,获取起点位置和终点位置,进一步得到行程值。所述起点位置为由激光测距或条码定位器上传的实际位置值;所述终点位置为当前任务阶段的目标点位置,如当前空载,则目标位置为取货坐标,如当前已经取货,则目标位置为物料需要转运到达的目标点。所述行程值计算公式如下:
56.p
l
=|p
s-pe|;
57.式中,p
l
为行程值,ps为起点位置,pe为终点位置。
58.步骤s2,对所述行程值与曲线设定值比较,若所述行程值小于所述曲线设定值,则控制rgv进行机械爬行;若所述行程值大于或等于所述曲线设定值,则执行“步骤s3”。本实施例中,所述曲线设定值为0.5m。
59.步骤s3,基于最大行驶速度、加速度和所述行程值进行梯形加减法运算得到梯形运行曲线。
60.作为一种可选的实施方式,所述步骤s3具体为:
61.基于最大行驶速度和所述加速度得到第一加速行驶时间,进一步得到第一加速行驶位移;
62.对所述第一加速行驶位移和所述行程值进行判断。
63.当两倍所述第一加速行驶位移大于所述行程值时,确定rgv行驶分为加速阶段、匀速阶段和减速阶段,基于所述最大行驶速度、所述行程值和所述加速度,采用梯形加减法确定第一加速曲线、匀速曲线和第一减速曲线,进而得到第一梯形图。
64.当两倍所述第一加速行驶位移等于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述最大行驶速度、所述第一加速行驶位移和所述加速度,采用梯形加减法确定第二加速曲线和和第二减速曲线,进而得到第二梯形图。
65.当两倍所述第一加速行驶位移小于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述行程值确定第二加速行驶位移,基于所述第二加速行驶位移和所述加速度,采用梯形加减法确定第三加速曲线和第三减速曲线,进而得到第三梯形图;所述梯形运行曲线为所述第一梯形图、所述第二梯形图或所述第三梯形图。
66.步骤s4,对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶。
67.作为一种可选的实施方式,所述步骤s4具体为:
68.当两倍所述第一加速行驶位移大于所述行程值时,对所述第一梯形图进行余弦拟合得到第一余弦图。具体地,加速阶段的计算公式为:
[0069][0070]
式中:v
(t)
为t时刻的行驶速度,v0为初速度,vm为最大行驶速度,tm为加速时间。
[0071]
由于直线往复式rgv每次执行文物都提前获取任务的起点位置和终点位置,可认为每次沿轨道方向移动过程的初速度为0,终点速度也为0,因此当v0=0时,上式简化为:
[0072][0073]
当两倍所述第一加速行驶位移等于所述行程值时,对所述第二梯形图进行余弦拟合得到第二余弦图。匀速阶段v
(t)
=vm。
[0074]
当两倍所述第一加速行驶位移小于所述行程值时,对所述第三梯形图进行余弦拟合得到第三余弦图;所述余弦运行曲线为所述第一余弦图、所述第二余弦图或所述第三余弦图。减速阶段的计算公式为:
[0075][0076]
基于所述余弦运行曲线控制rgv行驶。
[0077]
作为一种可选的实施方式,本发明所述方法还包括:
[0078]
当基于所述余弦运行曲线控制rgv行驶时,实时获取运行误差值,基于所述运行误差值对rgv进行pid调节。
[0079]
具体地,例如,当行程值为10m,加速度为1m/s2,最大行驶速度为2.67m/s时的第一梯形图和第一余弦图如图2所示。
[0080]
当行程4m,加速度1m/s2,最大速度2.67m/s,无法加速至最大值,在达到2m/s后即开始减速,第三梯形图和第三余弦图如图3所示。
[0081]
图4为本发明直线往复式rgv曲线调速系统结构图。如图所示,本发明提供了一种直线往复式rgv曲线调速系统,包括:行程值模块1、判断模块2、梯形运算模块3和余弦运算模块4。
[0082]
所示行程值模块1用于获取起点位置和终点位置,进一步得到行程值。
[0083]
所示判断模块2用于对所述行程值与曲线设定值比较,若所述行程值小于所述曲线设定值,则控制rgv爬行;若所述行程值大于或等于所述曲线设定值,则执行所示梯形运算模块3。
[0084]
所述梯形运算模块3用于基于最大行驶速度、加速度和所述行程值进行梯形加减法运算得到梯形运行曲线。
[0085]
所示余弦运算模块4用于对所述梯形曲线进行余弦拟合得到余弦运行曲线;基于所述余弦运行曲线控制rgv行驶。
[0086]
作为一种可选的实施方式,本发明所述系统还包括:pid调节模块。
[0087]
所示pid调节模块用于当基于所述余弦运行曲线控制rgv行驶时,实时获取运行误差值,基于所述运行误差值对rgv进行pid调节。
[0088]
作为一种可选的实施方式,本发明所述梯形运算模块3,具体为:
[0089]
基于最大行驶速度和所述加速度得到第一加速行驶时间,进一步得到第一加速行驶位移。
[0090]
对所述第一加速行驶位移和所述行程值进行判断。
[0091]
当两倍所述第一加速行驶位移大于所述行程值时,确定rgv行驶分为加速阶段、匀速阶段和减速阶段,基于所述最大行驶速度、所述行程值和所述加速度,采用梯形加减法确
定第一加速曲线、匀速曲线和第一减速曲线,进而得到第一梯形图。
[0092]
当两倍所述第一加速行驶位移等于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述最大行驶速度、所述第一加速行驶位移和所述加速度,采用梯形加减法确定第二加速曲线和和第二减速曲线,进而得到第二梯形图。
[0093]
当两倍所述第一加速行驶位移小于所述行程值时,确定rgv行驶分为加速阶段和减速阶段,基于所述行程值确定第二加速行驶位移,基于所述第二加速行驶位移和所述加速度,采用梯形加减法确定第三加速曲线和第三减速曲线,进而得到第三梯形图;所述梯形运行曲线为所述第一梯形图、所述第二梯形图或所述第三梯形图。
[0094]
作为一种可选的实施方式,本发明所述余弦运算模块4,具体为:
[0095]
当两倍所述第一加速行驶位移大于所述行程值时,对所述第一梯形图进行余弦拟合得到第一余弦图。
[0096]
当两倍所述第一加速行驶位移等于所述行程值时,对所述第二梯形图进行余弦拟合得到第二余弦图。
[0097]
当两倍所述第一加速行驶位移小于所述行程值时,对所述第三梯形图进行余弦拟合得到第三余弦图;所述余弦运行曲线为所述第一余弦图、所述第二余弦图或所述第三余弦图。
[0098]
基于所述余弦运行曲线控制rgv行驶。
[0099]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0100]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。