:
1.本实用新型涉及无人车技术领域,尤其涉及一种便于转向的无人车。
背景技术:
2.随着科技的发展,无人车由于其能够节省人力,被广泛应用于巡检及图像采集工作中,这样不仅能够降低工作人员的工作量,而且在某些环境复杂的巡检工作中,不需要人工处理,提高工作人员作业的安全性。
3.无人车通常在较为复杂的环境中作业,因此,通常需要在狭小的空间内运作,需要频繁并且大角度的改变行进方向,但传统无人车通常转向角度较小,不能目前满足大角度转向的工作需求。
4.因此,本领域亟需一种便于转向的无人车。
5.有鉴于此,提出本实用新型。
技术实现要素:
6.本实用新型的目的在于提供一种便于转向的无人车,扩大转向角度。
7.具体的,本实用新型的第一方面,提供了一种便于转向的无人车,所述便于转向的无人车包括:
8.转向机构,所述转向机构包括转向轴和转向轮,所述转向轴和转向轮相连接,所述转向轴转动能够带动转向轮转动,使车辆转向;
9.车辆底盘,所述车辆底盘设置有前轮槽,所述前轮槽由槽内向外延伸设置有凸耳,所述凸耳高度由中部向两侧逐渐降低,所述转向轴端部与所述凸耳相连接设置于所述凸耳中部,所述转向轮被容纳于所述前轮槽内。
10.采用上述方案,当车辆转向时,所述转向轴转动带动转向轮转动,使车辆转向,所述转向轴端部与所述凸耳相连接,且所述凸耳中部高度大于两侧,即所述凸耳的两侧能够为转向轮的转动提供更多的空间,扩大所述转向轮可用的转向角度,便于车辆转向。
11.进一步地,所述前轮槽在所述凸耳两侧形成有v型槽,当车辆转向时,所述转向轮前端或者后端进入所述v型槽。
12.采用上述方案,所述v型槽扩大了所述凸耳的让位空间,更便于车辆转向。
13.进一步地,所述转向机构还包括用于驱动转向的舵机和转向杆,所述转向杆通过第一连接杆与转向轴相连接,所述舵机还设置有转向臂,所述舵机能驱动转向臂摆动,所述转向杆还设置有第二连接杆,所述转向臂与第二连接杆相配合带动所述转向杆摆动,进而使转向轴转动。
14.采用上述方案,通过舵机的转向臂驱动转向,提高转向灵活度。
15.进一步地,所述转向臂由转向杆下方穿过与第二连接杆相配合。
16.采用上述方案,节省所述转向臂的安装空间。
17.进一步地,所述转向机构还包括固定件,所述固定件设置有凹口,所述舵机卡接与
所述凹口内。
18.采用上述方案,便于固定舵机,提高所述舵机安装稳定性。
19.优选地,所述固定件还设置有支撑杆,所述支撑杆一端与所述车辆底盘相连接,另一端向上延伸,使所述舵机悬置与所述车辆底盘上方。
20.采用上述方案,所述支撑杆使所述舵机悬置与所述车辆底盘上方,减少车辆行驶时的振动对舵机的影响,提高舵机转向精度。
21.优选地,所述转向机构还包括固定杆,所述固定杆设置于所述转向轴上方,且与所述转向轴顶端相连接。
22.采用上述方案,为所述转向轴提供上方的连接点,提高转向轴转动稳定性。
23.优选地,所述固定杆还设置有第三连接杆,所述第三连接杆底端与所述车辆底盘相连接,顶端支撑所述固定杆。
24.采用上述方案,提高所述固定杆安装稳定性。
25.进一步地,所述便于转向的无人车还包括感应装置,所述感应装置设置于所述便于转向的无人车外侧,用于防止车辆发生碰撞,所述感应装置包括红外感应件和安装板,所述红外感应件设置于所述安装板上,所述安装板连接于所述车辆底盘边缘处。
26.采用上述方案,所述感应装置设置于所述便于转向的无人车外侧,能够对车辆外周的障碍物进行感应,当遇到障碍物时能够及时转向,防止发生碰撞。
27.优选地,所述车辆底盘还设置有稳定件,所述稳定件设置有卡槽,所述安装板与卡槽相配合,所述安装板两侧均设置有稳定件,两个所述稳定件的卡槽相对设置,将所述安装板固定于两个所述稳定件之间。
28.采用上述方案,提高所述安装板的安装稳定性,进而保证所述感应装置的稳定性。
29.综上所述,本实用新型具有以下有益效果:
30.1.本技术的便于转向的无人车,当车辆转向时,所述转向轴转动带动转向轮转动,使车辆转向,所述转向轴端部与所述凸耳相连接,且所述凸耳中部高度大于两侧,即所述凸耳的两侧能够为转向轮的转动提供更多的空间,扩大所述转向轮可用的转向角度,便于车辆转向;
31.2.本技术的便于转向的无人车,所述v型槽扩大了所述凸耳的让位空间,更便于车辆转向;
32.3.本技术的便于转向的无人车,所述支撑杆使所述舵机悬置与所述车辆底盘上方,减少车辆行驶时的振动对舵机的影响,提高舵机转向精度;
33.4.本技术的便于转向的无人车,所述感应装置设置于所述便于转向的无人车外侧,能够对车辆外周的障碍物进行感应,当遇到障碍物时能够及时转向,防止发生碰撞,所述稳定件提高所述安装板的安装稳定性,进而保证所述感应装置的稳定性。
附图说明:
34.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
35.图1为本技术便于转向的无人车的底部结构示意图;
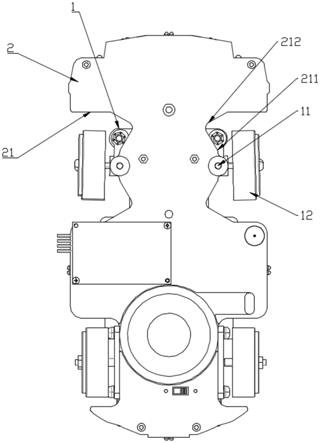
36.图2为所述车辆底盘的部分结构示意图;
37.图3为所述车辆底盘的部分剖视结构示意图;
38.图4为图2中a处的局部放大图;
39.图5为本技术便于转向的无人车的整体结构示意图。
40.附图标记说明:
41.通过上述附图标记说明,结合本实用新型的实施例,可以更加清楚的理解和说明本实用新型的技术方案。
42.1、转向机构;11、转向轴;12、转向轮;13、舵机;131、转向臂;14、转向杆;141、第二连接杆;15、第一连接杆;16、固定件;161、凹口;162、支撑杆;17、固定杆;171、第三连接杆;2、车辆底盘;21、前轮槽;211、凸耳;212、v型槽;22、稳定件;221、卡槽;3、感应装置;31、红外感应件;32、安装板;4、外壳体;
具体实施方式:
43.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
44.在本实用新型使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本实用新型。在本实用新型和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
45.以下将通过实施例对本实用新型进行详细描述。
46.如图1所示,本实用新型提供了一种便于转向的无人车,所述便于转向的无人车包括:
47.转向机构1,所述转向机构1包括转向轴11和转向轮12,所述转向轴11和转向轮12相连接,所述转向轴11转动能够带动转向轮12转动,使车辆转向;
48.在具体实施过程中,所述转向轮12与转向轴11侧面相连接。
49.车辆底盘2,所述车辆底盘2设置有前轮槽21,所述前轮槽21由槽内向外延伸设置有凸耳211,所述凸耳211高度由中部向两侧逐渐降低,所述转向轴11端部与所述凸耳211相连接设置于所述凸耳211中部,所述转向轮12被容纳于所述前轮槽21内。
50.采用上述方案,当车辆转向时,所述转向轴11转动带动转向轮12转动,使车辆转向,所述转向轴11端部与所述凸耳211相连接,且所述凸耳211中部高度大于两侧,即所述凸耳211的两侧能够为转向轮12的转动提供更多的空间,扩大所述转向轮12可用的转向角度,便于车辆转向。
51.在具体实施过程中,所述凸耳211低于所述前轮槽21的槽口高度。
52.采用上述方案,将转向轮12容纳在前轮槽21内,保护转向轮12。
53.如图1所示,在本实用新型一个优选的实施方式中,所述前轮槽21在所述凸耳211两侧形成有v型槽212,当车辆转向时,所述转向轮12前端或者后端进入所述v型槽212。
54.在具体实施过程中,所述v型槽212内壁即为所述前轮槽21内壁。
55.采用上述方案,所述v型槽212扩大了所述凸耳211的让位空间,更便于车辆转向。
56.如图2、3所示,在具体实施过程中,所述转向机构1还包括用于驱动转向的舵机13和转向杆14,所述转向杆14通过第一连接杆15与转向轴11相连接,所述舵机13还设置有转向臂131,所述舵机13能驱动转向臂131摆动,所述转向杆14还设置有第二连接杆141,所述转向臂131与第二连接杆141相配合带动所述转向杆14摆动,进而使转向轴11转动。
57.在具体实施过程中,所述第一连接杆15通过转轴与转向杆14及转向轴11相连接。
58.采用上述方案,通过舵机13的转向臂131驱动转向,提高转向灵活度。
59.在具体实施过程中,所述转向臂131设置有摆动槽,所述第二连接杆141卡接在摆动槽内。
60.在具体实施过程中,所述转向臂131由转向杆14下方穿过与第二连接杆141相配合。
61.采用上述方案,节省所述转向臂131的安装空间。
62.如图2、3所示,在具体实施过程中,所述转向机构1还包括固定件16,所述固定件16设置有凹口161,所述舵机13卡接与所述凹口161内。
63.采用上述方案,便于固定舵机13,提高所述舵机13安装稳定性。
64.如图2、3所示,在本实用新型一个优选的实施方式中,所述固定件16还设置有支撑杆162,所述支撑杆162一端与所述车辆底盘2相连接,另一端向上延伸,使所述舵机13悬置与所述车辆底盘2上方。
65.采用上述方案,所述支撑杆162使所述舵机13悬置与所述车辆底盘2上方,减少车辆行驶时的振动对舵机13的影响,提高舵机13转向精度。
66.如图2、3所示,在本实用新型一个优选的实施方式中,所述转向机构1还包括固定杆17,所述固定杆17设置于所述转向轴11上方,且与所述转向轴11顶端相连接。
67.采用上述方案,为所述转向轴11提供上方的连接点,提高转向轴11转动稳定性。
68.如图2、3所示,在本实用新型一个优选的实施方式中,所述固定杆17还设置有第三连接杆171,所述第三连接杆171底端与所述车辆底盘2相连接,顶端支撑所述固定杆17。
69.采用上述方案,提高所述固定杆17安装稳定性。
70.如图4、5所示,在具体实施过程中,所述便于转向的无人车还包括感应装置3,所述感应装置3设置于所述便于转向的无人车外侧,用于防止车辆发生碰撞,所述感应装置3包括红外感应件31和安装板32,所述红外感应件31设置于所述安装板32上,所述安装板32连接于所述车辆底盘2边缘处。
71.在具体实施过程中,所述便于转向的无人车的前、后、左、右四侧均设置有感应装置3。
72.采用上述方案,所述感应装置3设置于所述便于转向的无人车外侧,能够对车辆外周的障碍物进行感应,当遇到障碍物时能够及时转向,防止发生碰撞。
73.如图4、5所示,在本实用新型一个优选的实施方式中,所述车辆底盘2还设置有稳定件22,所述稳定件22设置有卡槽221,所述安装板32与卡槽221相配合,所述安装板32两侧均设置有稳定件22,两个所述稳定件22的卡槽221相对设置,将所述安装板32固定于两个所述稳定件22之间。
74.采用上述方案,提高所述安装板32的安装稳定性,进而保证所述感应装置3的稳定性。
75.如图4、5所示,在具体实施过程中,所述便于转向的无人车还包括外壳体4,所述外壳体4扣合于车辆底盘2上,所述外壳体4内部设置有用于为车辆供电的蓄电池和用于对车辆进行控制的控制器,所述控制器可以为单片机或者cpu。
76.工作原理:当车辆行进并需要转向时,所述转向轴11转动带动转向轮12转动,使车辆转向,所述转向轴11端部与所述凸耳211相连接,且所述凸耳211中部高度大于两侧,即所述凸耳211的两侧能够为转向轮12的转动提供更多的空间,扩大所述转向轮12可用的转向角度,便于车辆转向。
77.应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。