1.本实用新型涉及一种斜巷轨道车状态动态监测系统。
背景技术:
2.目前我国很少有专门监测车辆运行状态的系统,现有的斜巷运输中车辆视频监控系统——例如:绞车斜巷提升视频监控装置,都存在着无法监控车辆实时运行状态数据,无法监控车辆的加速度和左右水平偏差值(一般指重载车经过时,左、右两侧轨道上表面高度差,俗称阴阳道)的问题。
3.现有技术都是由工作人员沿轨道巡检,但是人工巡检时,必须停止矿车运行,无法检测重载车经过时轨道的阴阳道故障。而很多情况下,两股钢轨顶面的高低差在空载和重载下,表现差异很大。现有技术缺乏可以检测轨道在重载车经过时的左右水平偏差值。
技术实现要素:
4.本实用新型要解决的技术问题是填补现有技术的上述空白,提供一种斜巷轨道车状态动态监测系统。
5.为解决上述技术问题,本斜巷轨道车状态动态监测系统包括矿井下机车定位系统,该矿井下机车定位系统包括地面主机、显示屏,每列配用矿车上分别设有对应的uwb标签,并可实时定位配用矿车的位置,配用巷道与地面主机之间设有工业以太网通信系统,该工业以太网通信系统包括串口服务器、光纤和工业以太网交换机,其特征在于:每列配用矿车上还设有九轴姿态传感器、无线电编码模块、无线透传模块和24v蓄电池,九轴姿态传感器、无线电编码模块、无线透传模块顺次电连接,九轴姿态传感器实时采集到的配用矿车的实时加速度和实时左右水平偏差值,与所述矿井下机车定位系统根据测定的配用矿车的实时定位信号,一同通过工业以太网通信系统,传输给地面主机,并显示在显示屏上。
6.按照国家规定:主要运输线路轨道直线段两股钢轨顶面的高低差误差不大于 5mm;曲线段加高后误差不大于 5mm。一般运输线路轨道水平允许偏差不大于10mm,重载车经过时水平差超过上述标准的轨道(俗称阴阳道)必须消除。
7.如此设计,在显示配用矿车的实时位置的同时,显示此时相应的配用矿车的实时左右水平偏差值,一旦发现某处轨道重载车经过时左右水平偏差值超标,便通知工作人员及时对相应轨道进行维修,垫实等处理。
8.同时还显示配用矿车的实时加速度,通过实时加速度变化,可以辅恶助监控配用矿车的加速、减速及均速运行状态。
9.作为优化,所述显示屏上设有轨道轨迹线,所述地面主机根据所述矿井下机车定位系统传输来的配用矿车的实时定位信号,在轨道轨迹线上实时显示一个实时车位光点,该实时车位光点的位置与对应的配用矿车的实时位置相对应,同时在该位置附近显示配用矿车的实时加速度和实时左右水平偏差值,相应配用矿车移动时,所述实时车位光点在轨道轨迹线上同步移动。如此设计,便于矿车远程调度、监控。
10.作为优化,所述显示屏的轨道轨迹线上下分别设有上等距偏移线和下等距偏移线,上等距偏移线和下等距偏移线分别设有一个垂直指示线,两个垂直指示线的延长线重合,且所述实时车位光点始终位于两个垂直指示线的延长线与轨道轨迹线交点上,两个垂直指示线上分别设有加速度指示光点和左右水平偏差值指示光点,配用矿车的实时加速度和实时左右水平偏差值为零时,加速度指示光点和左右水平偏差值指示光点分别位于相应垂直指示线与上等距偏移线和下等距偏移线的交点上,加速度指示光点与上等距偏移线的距离与配用矿车的实时加速度的绝对值成正比,加速度指示光点位于上等距偏移线的上方或下方,分别对应配用矿车的实时加速度为正值或负值,
11.左右水平偏差值指示光点与下等距偏移线的距离与配用矿车的实时左右水平偏差值的绝对值成正比,左右水平偏差值指示光点位于下等距偏移线的上方或下方,分别对应配用矿车左侧高或右侧高。如此设计,便于直观地观察、监控配用矿车运行过程中的位置、加速度和左右水平偏差值。
12.本实用新型斜巷轨道车状态动态监测系统结构简单、设计合理,建设方便、维修方便,其九轴姿态传感器测量数据准确,光纤传输无延时,地面可准确实时进行监测并作出判断,最大程度保证斜巷提升运输安全,尽可能避免事故的发生,适合各大煤矿、矿井使用。
附图说明
13.下面结合附图对本实用新型斜巷轨道车状态动态监测系统作进一步说明:
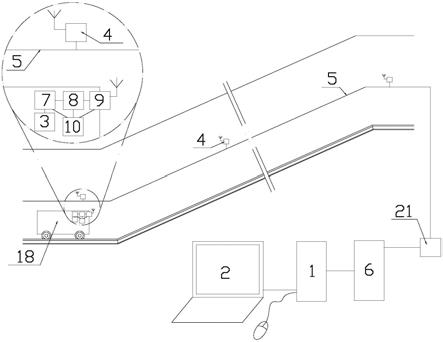
14.图1是本斜巷轨道车状态动态监测系统实施方式一的结构示意图;
15.图2是本斜巷轨道车状态动态监测系统实施方式一的配用矿车左右平衡状态下减速行进时,显示屏上展示的画面示意图;
16.图3是本斜巷轨道车状态动态监测系统实施方式一的配用矿车左右平衡状态下均速行进时,显示屏上展示的画面示意图;
17.图4是本斜巷轨道车状态动态监测系统实施方式一的配用矿车左侧偏高状态下均速行进时,显示屏上展示的画面示意图;
18.图5是本斜巷轨道车状态动态监测系统实施方式一的配用矿车右侧偏高状态下加速行进时,显示屏上展示的画面示意图;
19.图6是本斜巷轨道车状态动态监测系统实施方式二的配用矿左右平衡状态下均速行进时,显示屏上展示的画面示意图。
20.图中:1为地面主机、2为显示屏、3为uwb标签、4为串口服务器、5为光纤、6为工业以太网交换机、7为九轴姿态传感器、8为无线电编码模块、9为无线透传模块、10为24v蓄电池、11为轨道轨迹线、12为实时车位光点、13为上等距偏移线、14为下等距偏移线、15为垂直指示线、16为加速度指示光点、17为左右水平偏差值指示光点、18为配用矿车、19为上限偏移线、20为下限偏移线。
21.a为配用矿车18的实时加速度、
△
h为配用矿车18的实时左右水平偏差值。
具体实施方式
22.实施方式一:如图1
‑
5所示,本斜巷轨道车状态动态监测系统包括矿井下机车定位系统和矿用多煤体通信,该矿井下机车定位系统包括地面主机1、显示屏2,每列配用矿车18
上分别设有对应的uwb标签3,并可实时定位配用矿车18的位置,配用巷道与地面主机1之间设有工业以太网通信系统,该工业以太网通信系统包括串口服务器4、光纤5和工业以太网交换机6,其特征在于:每列配用矿车上还设有九轴姿态传感器7、无线电编码模块8、无线透传模块9和24v蓄电池10,九轴姿态传感器7、无线电编码模块8、无线透传模块9顺次电连接,九轴姿态传感器7实时采集到的配用矿车18的实时加速度a和实时左右水平偏差值
△
h,与所述矿井下机车定位系统根据测定的配用矿车18的实时定位信号,一同通过工业以太网通信系统,传输给地面主机1,并显示在显示屏2上。
23.矿井下机车定位系统可参见cn 111163431 a公开的一种uwb超宽带无线通信的矿井下机车测距定位方法及系统。
24.矿用多煤体通信可参见cn 101394447 b公开的矿用多媒体通讯系统。
25.所述显示屏2上设有轨道轨迹线11,所述地面主机1根据所述矿井下机车定位系统传输来的配用矿车的实时定位信号,在轨道轨迹线11上实时显示一个实时车位光点12,该实时车位光点12的位置与对应的配用矿车(指带有九轴姿态传感器7、无线电编码模块8、无线透传模块9的那节车体)的实时位置相对应,同时在该位置附近显示配用矿车的实时加速度a和实时左右水平偏差值
△
h,相应配用矿车移动时,所述实时车位光点12在轨道轨迹线11上同步移动。
26.所述显示屏2的轨道轨迹线11上下分别设有上等距偏移线13和下等距偏移线14,上等距偏移线13和下等距偏移线14分别设有一个垂直指示线15,两个垂直指示线15的延长线重合,且所述实时车位光点12始终位于两个垂直指示线15的延长线与轨道轨迹线11交点上,两个垂直指示线15上分别设有加速度指示光点16和左右水平偏差值指示光点17,配用矿车18的实时加速度a和实时左右水平偏差值
△
h为零时,加速度指示光点16和左右水平偏差值指示光点17分别位于相应垂直指示线15与上等距偏移线13和下等距偏移线14的交点上,如图3所示,这是最理想的状态。
27.加速度指示光点16与上等距偏移线13的距离与配用矿车18的实时加速度a的绝对值成正比,加速度指示光点16位于上等距偏移线13的上方或下方,分别对应配用矿车18的实时加速度a为正值或负值。
28.如图2所示,所述加速度指示光点16位于上等距偏移线13下方,对应的配用矿车18的实时加速度a为负值,配用矿车18正在减速。
29.如图5所示,所述加速度指示光点16位于上等距偏移线13上方,对应的配用矿车18的实时加速度a为正值,配用矿车18正在加速。
30.左右水平偏差值指示光点17与下等距偏移线14的距离与配用矿车18的实时左右水平偏差值
△
h的绝对值成正比,左右水平偏差值指示光点17位于下等距偏移线14的上方或下方,分别对应配用矿车18左侧高或右侧高。
31.如图4所示,左右水平偏差值指示光点17位于下等距偏移线14上方,对应的配用矿车18左侧高。
32.如图5所示,所述左右水平偏差值指示光点17位于下等距偏移线14下方,对应的配用矿车18右侧高。
33.实施方式二:如图6所示,所述下等距偏移线14上下分别设有上限偏移线19和下限偏移线20,上限偏移线19上任意一点与下等距偏移线14的距离与配用矿车18所在实时位置
的左侧钢轨顶面高于右侧钢轨顶面的
△
h值的最大允许上限相对应,
34.下限偏移线20上任意一点与下等距偏移线14的距离与配用矿车18所在实时位置的右侧钢轨顶面高于左侧钢轨顶面的
△
h值的最大允许上限相对应。如此设计,便于直观查看左右水平偏差值是否超标,及时处理。