1.本实用新型属于铁路运输设备设计技术领域,涉及一种实现铁路货车下作用式车钩无人作业、远程控制的手自一体开钩装置。
背景技术:
2.铁路车辆特别是铁路货车长久以来一直依靠人工来进行货车之间以及机车与货车之间的连挂和解编工作,铁路货车车钩开钩为人工操作。连挂操作时,操作人员必须将自己置于两辆车辆之间,抓住其中一辆车的车钩提杆并施加旋转力来抬起车钩锁铁,以解锁车辆的钩舌。
3.目前车钩开钩技术及其开钩操作还存在较多缺点有待改进。传统的操作方式,不但影响了铁路货运效率,而且在增加人工成本的同时,也给操作人员带来一定的安全隐患;有时会出现因疏忽引发操作者在铁轨间穿行磕碰受伤的事故。目前还没有既能保留手工开钩功能的同时,又实现无人作业、远程控制自动开钩功能的技术。
技术实现要素:
4.本实用新型根据现有技术的不足公开了一种铁路车钩手自一体开钩装置。本实用新型目的是提供一种实现铁路车辆下作用式车钩可无人作业、远程控制的手自一体开钩装置。
5.本实用新型通过以下技术方案实现:
6.铁路车钩手自一体开钩装置,包括实现铁路车钩开启和锁闭的下锁销杆,其特征在于:开钩装置设置于车钩钩头下部推顶机构的两侧位置;包括驱动下锁销杆的执行工作装置和可分别驱动执行工作装置的手动开钩操作装置和自动开钩操作装置;
7.执行工作装置为对称设置的驱动机构,由对称结构的下锁销转轴、两端分别设置的手动端工作块、手动端从动块和自动端从动块、自动端工作块构成;下锁销转轴中部设置有驱动下锁销杆开闭的凸台,一端与自动端从动块连接固定,另一端与手动端从动块连接固定;手动端工作块与手动端从动块、自动端工作块与自动端从动块均构成结构相同并对称布置的两独立的单向转动驱动机构,手动端工作块和自动端工作块分别与各自驱动机构的手动开钩操作装置和自动开钩操作装置联接固定。
8.所述单向转动驱动机构的工作块具有沿中心对称的两组转动拨臂,从动块具有沿中心对称的两组单向转动拨槽,转动拨臂与转动拨槽匹配嵌入结合由转动拨臂驱动转动拨槽实现单向驱动转动。
9.所述是两独立的单向转动驱动机构是分别独立的同轴驱动转动机构。
10.所述自动开钩操作装置包括控制单元、连接线缆、摆动气缸、齿轮座、从动齿轮、主动齿轮和基座;基座固定于车钩钩头下部作为支撑结构,从动齿轮、主动齿轮啮合安装在齿轮座内,齿轮座一侧固定在基座上,另一侧与摆动气缸固定,从动齿轮通过销轴与自动端工作块驱动连接,主动齿轮通过销轴与摆动气缸输出轴驱动连接,控制单元通过连接线缆与
摆动气缸连接。
11.所述控制单元包括电磁阀、无线接受装置和信号处理器。
12.所述手动开钩操作装置包括车钩提杆、提杆连接头、支撑座、固定座;固定座固定于车钩钩头下部作为支撑结构,车钩提杆端头的弯钩穿入提杆连接头端部的孔内,提杆连接头通过支撑座与固定座连接,提杆连接头的轴身部位穿过支撑座的孔与手动端工作块通过平键驱动连接。
13.所述下锁销转轴中部的凸台嵌入铁路货车车钩的下锁销杆凹槽内,通过转动抬起下锁销杆实现货车车钩的钩锁组成解锁,下锁销转轴两端为矩形阶梯轴,一端穿入自动端从动块连接固定,另一端穿入手动端从动块连接固定。
14.本实用新型铁路车钩手自一体开钩装置结构可靠,工作原理新颖,既满足未来智能货车发展的需要,又便于在既有铁路货车大面积推广应用,完美解决在现有车辆车钩设计结构条件下人工操作开钩和无人作业远程控制自动开钩并行安装于既有铁路货车上、互不干涉的问题,适应我国现阶段铁路货车技术的发展,可直接在既有铁路货车车钩上安装使用。
附图说明
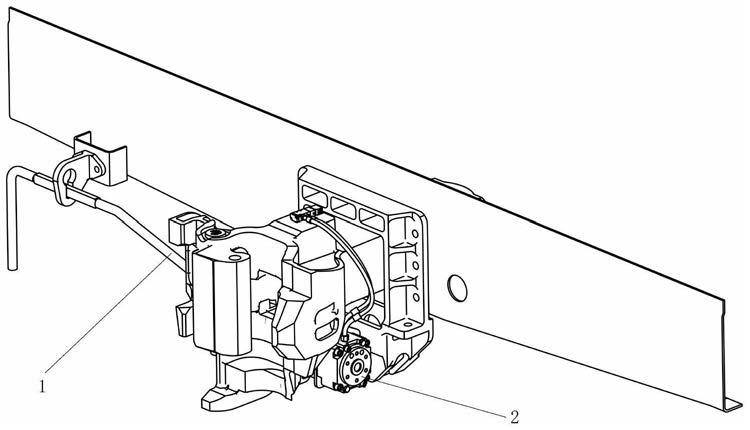
15.图1是本实用新型开钩装置组装在铁路货车车钩上安装位置示意图;
16.图2是本实用新型开钩装置轴侧结构示意图;
17.图3是传统手动开钩操作装置组装位置轴侧结构示意图;
18.图4是本实用新型开钩装置组装位置轴侧结构示意图;
19.图5是本实用新型开钩装置执行工作装置轴侧爆炸结构示意图;
20.图6是本实用新型开钩装置单向转动驱动机构轴侧爆炸结构示意图。
21.图中零部件及编号:
22.1为手动开钩操作装置,2为自动开钩操作装置,3为执行工作装置;
23.1.1为车钩提杆,1.2为提杆连接头,1.3为支撑座,1.4为固定座;
24.2.1为控制单元,2.2为连接线缆,2.3为摆动气缸,2.4为齿轮座,2.5为从动齿轮,2.6为主动齿轮,2.7为基座;
25.3.1为手动端工作块,3.2为手动端从动块,3.3为自动端从动块,3.4为自动端工作块,3.5为下锁销转轴,3.6为凸台,3.7为转动拨臂,3.8为转动拨槽。
具体实施方式
26.下面结合具体实施方式对本实用新型进一步说明,具体实施方式是对本实用新型原理的进一步说明,不以任何方式限制本实用新型,与本实用新型相同或类似技术均没有超出本实用新型保护的范围。
27.结合图1至图6,开钩装置包括传统手动开钩操作装置1、远程控制自动开钩操作装置2、执行工作装置3等组成,整体装置安装在钩头下部推顶机构的两侧位置,手动开钩操作装置1保留了既有铁路货车车钩传承多年的人工开钩功能,远程控制自动开钩操作装置2能实现无人作业、远程控制自动开钩的功能,执行工作装置3将手动开钩操作装置1和远程控制自动开钩操作装置2巧妙连接在一起,实现铁路货车车钩的开钩动作。
28.如图3、图4、图5、图6所示,传统手动开钩操作装置1主要包括车钩提杆1.1、提杆连接头1.2、支撑座1.3、固定座1.4等组成。传统手动开钩操作装置1通过固定座1.4安装在铁路货车车钩的钩头下部有车钩提杆1.1的一侧,车钩提杆1.1端头的弯钩穿入提杆连接头1.2端部的孔内,提杆连接头1.2通过支撑座1.3与固定座1.4连接在一起,提杆连接头1.2的轴身部位穿过支撑座1.3的孔与执行工作装置3的手动端工作块3.1通过平键连接在一起。
29.铁路货车车钩的传统人工开钩原理是:操作者按图示逆时针转动车钩提杆1.1,车钩提杆1.1带动提杆连接头1.2逆时针转动,提杆连接头1.2再带动执行工作装置3的手动端工作块3.1逆时针转动,手动端工作块3.1此时咬合手动端从动块3.2实现逆时针转动,手动端从动块3.2与下锁销转轴3.5端头的矩形轴连接在一起,故下锁销转轴3.5也将逆时针转动。此时下锁销转轴3.5上的凸台3.6将带动铁路货车车钩的下锁销杆动作,从而实现货车车钩的钩锁组成解锁,达到钩舌开钩的目的。与此同时,下锁销转轴3.5另一侧自动端从动块3.3与自动端工作块3.4脱离,不发生动作关系,从而实现手动开钩不干涉远程控制开钩操作装置的作用。
30.如图2、图4、图5、图6远程控制自动开钩操作装置2主要包括控制单元2.1、连接线缆2.2、摆动气缸2.3、齿轮座2.4、从动齿轮2.5、主动齿轮2.6、基座2.7等组成。远程控制自动开钩操作装置2通过基座2.7安装在铁路货车车钩的钩头下部没有车钩提杆1.1的一侧,从动齿轮2.5、主动齿轮2.6啮合后安装在齿轮座2.4内,齿轮座2.4一侧固定在基座2.7上,另一侧与摆动气缸2.3固定在一起,从动齿轮2.5通过销轴与执行工作装置3的自动端工作块3.4连接在一起,主动齿轮2.6通过销轴与摆动气缸2.3输出轴连接在一起,控制单元2.1放置在铁路货车钩头上方,控制单元2.1通过连接线缆2.2与摆动气缸2.3连接在一起。
31.铁路货车车钩的远程控制开钩操作装置原理是:机车通过线缆或远程无线遥控给控制单元2.1发出开钩电信号指令,控制单元2.1通过连接线缆2.2向摆动气缸2.3提供风源,控制摆动气缸2.3旋转方向,开钩动作如图示,摆动气缸2.3的输出轴顺时针转动,将带动主动齿轮2.6顺时针转动,与之啮合的从动齿轮2.5将逆时针转动,带动与之相连的执行工作装置的自动端工作块3.4逆时针转动,自动端工作块3.4此时咬合下锁销转轴一侧自动端从动块3.3实现逆时针转动,自动端的从动块3.3与下锁销转轴3.5端头的矩形轴连接在一起,故下锁销转轴3.5也将逆时针转动。此时下锁销转轴3.5上的凸台3.6将带动铁路货车车钩的下锁销杆动作,实现货车车钩的钩锁组成解锁,达到钩舌开钩的目的。与此同时,下锁销转轴3.5另一侧手动端从动块3.2与手动端工作块3.1脱离,不发生动作关系,实现远程控制自动开钩不干涉传统手动开钩操作装置1的作用。
32.执行工作装置3主要包括手动端工作块3.1、手动端从动块3.2、自动端从动块3.3、自动端工作块3.4、下锁销转轴3.5等组成。下锁销转轴3.5中间有一凸台3.6,凸台3.6嵌入铁路货车车钩的下锁销杆凹槽内,通过转动抬起下锁销杆,从而实现货车车钩的钩锁组成解锁,达到钩舌开钩的目的,下锁销转轴3.5两端为矩形阶梯轴,一端穿入自动端从动块3.3,另一端穿入手动端从动块3.2,自动端从动块3.3与自动端工作块3.4上下咬合,手动端从动块3.2与手动端工作块3.1上下咬合,手动端工作块3.1与传统手动开钩操作装置1的提杆连接头1.2通过平键联成一体,自动端工作块3.4与远程控制自动开钩操作装置2的从动齿轮2.5通过销轴联成一体。其工作原理是:手动工作块3.1只有按照图示方向旋转,才能与手动从动块3.2上下咬合,带动下锁销转轴3.5实现同向旋转,从而实现货车车钩的钩锁组
成解锁,达到钩舌开钩的目的,此时,下锁销转轴3.5另一侧的自动从动块3.3与自动工作块3.4上下脱离,对远程控制的自动开钩操作装置2不发生作用,图示反向旋转则无任何效果;自动工作块3.4只有按照图示方向旋转,才能与自动从动块3.3上下咬合,带动下锁销转轴3.5实现同向旋转,从而实现远程控制货车车钩的钩锁组成解锁,达到钩舌开钩的目的,此时,下锁销转轴3.5另一侧的手动从动块3.2与手动工作块3.1上下脱离,对传统手动开钩操作装置1不发生作用,图示反向旋转则无任何效果。
33.如图6所示,图中示出一侧的单向转动驱动机构轴侧爆炸结构。两单向转动驱动机构对称布置于下锁销转轴3.5两端,每个工作块具有沿中心对称的两组转动拨臂3.7,从动块具有沿中心对称的两组单向转动拨槽3.8,工作块与从动块同轴安装,转动拨槽3.8为一侧设置挡块、另一侧设置可转动圆弧面的异形结构,转动拨臂3.7与转动拨槽3.8匹配嵌入结合由转动拨臂3.7驱动转动拨槽3.8实现单向驱动转动。在车辆结合锁钩锁闭时,下锁销杆驱动凸台3.6转动,并驱动下锁销转轴3.5转动,各单向转动驱动机构转动复位。在进行手动或自动钩锁组成解锁时,一侧工作块的转动拨臂3.7转动并驱动从动块的转动拨槽3.8转动实现开钩操作,另一侧从动块随动,同时其转动拨槽3.8圆弧面使转动拨臂3.7退出实现各自独立开钩操作。
34.远程控制自动开钩操作装置2的控制单元2.1由电磁阀、无线接受装置、信号处理器等组成。机车可通过有线的方式发出开钩指令信号给信号处理器或通过无线的方式发出开钩指令信号给无线接受装置后,通过电磁阀控制气路的开闭,实现摆动气缸2.3正转或反转,并通过2个齿轮的啮合传动以及自动端工作块3.4与自动端从动块3.3的咬合动作,将指令最终传递给执行工作装置的下锁销转轴3.5,从而实现远程控制开钩动作的实现。