1.本发明总体上涉及在通行门附近操作机动车辆的方法,并且更具体地涉及在需要通过屏障组件的可移动屏障以便获得访问受限区域(例如停车位、停车场或收费路段)的权限的情况下操作机动车辆。
背景技术:
2.这种带有屏障的屏障组件还具有用于提升或以其他方式移动屏障以允许机动车辆通过的开启装置。为了使开启装置提升屏障来让路,机动车辆和/或机动车辆的驾驶员与开启装置之间的交互可能是必要的。例如,该交互可以包括例如传送访问代码、按下按钮、取出票、说话或支付停车费或通行费。
3.通过这样的屏障组件可能看起来很简单,但通常需要来自机动车辆驾驶员的许多单独的动作。必须选择车辆的轨迹以使其在通常狭窄的路径上行驶并在屏障前方停下。在此过程中,驾驶员必须注意不要将机动车辆停在离开启装置太远的地方,否则无法在驾驶员不离开机动车辆或倒车以纠正机动车辆的位置的情况下与开启装置的hmi或支付终端进行交互。在接近操纵期间,驾驶员可能必须准备与开启装置交互,这可能包括举起门禁卡或操作支付终端。在操纵结束时,驾驶员通常必须打开驾驶员侧车窗以与开启系统进行交互。
4.整个驾驶操纵不得占用过多时间,以避免排队或打扰其他道路使用者。根据交通状况,整个驾驶操纵也可能会给驾驶员带来压力,因为驾驶操纵必须在狭窄的环境中进行并且碰撞风险增加。
5.例如,在专利公开文件us2017/0228717a1、cn106781688a、us2019/0164357a1、kr100832697b1和us 2019/0221048a1中公开了旨在在这种情况下支持驾驶员的已知系统。
6.然而,在这种情况下,需要进一步减轻驾驶员的负担。
技术实现要素:
7.进一步减轻驾驶员的负担的目的通过一种用于操作机动车辆的方法来实现,该方法包括从机动车辆的环境传感器收集/读取环境数据记录。评估环境数据记录以检测是否接近具有对接装置的屏障组件。确定停止数据记录和轨迹数据记录(例如,车辆操纵),停止数据记录包括机动车辆的停止位置,轨迹数据记录限定从机动车辆的当前位置到停止位置的轨迹,其中停止位置被配置为允许与对接装置进行交互。在接近屏障组件的过程中执行自动动作以便于通过通行门,其中该动作是根据与检测到的屏障组件对应的交互数据记录来确定的。
8.优选地,使用由机动车辆的现有环境传感器收集的数据,并且可以使用指示停止位置的停止数据记录使车辆半自主地或完全自主地停止,从而减轻驾驶员的负担。
9.根据一个实施例,确定指示机动车辆和/或机动车辆的驾驶员与屏障组件的交互的交互数据记录。指示交互的交互数据记录可以确定是否需要例如传送访问代码、按下按钮、取出票、说话或支付停车费或通行费来获得访问访问权限受限的区域的权限。因此,与
车辆停在屏障组件前面之后获得访问受限区域的权限所需采取的必要行动相关的更多信息是可用的。因此,车辆可以为随后的交互做好准备,特别是基于交互数据记录,例如通过打开驾驶员侧车窗使得驾驶员可以更容易地与屏障开启系统进行交互。
10.根据另一实施例,确定指示从机动车辆的当前位置到特定停止位置的轨迹的轨迹数据记录。因此,用于轨迹的轨迹数据记录描述了从机动车辆的当前位置到特定停止位置的路径。因此,可以半自主地或完全自主地控制机动车辆到停止位置,特别是根据基于轨迹数据记录确定的转向指令、油门指令和制动指令。
11.根据另一实施例,根据从机动车辆的当前位置到特定停止位置的轨迹数据记录确定用于控制机动车辆的控制记录。因此确定转向指令以便于半自主地或完全自主地控制机动车辆直至停止位置。这样,进一步减轻了驾驶员的负担。
12.根据另一实施例,根据交互数据记录执行交互,交互数据记录指示机动车辆和/或机动车辆的驾驶员与屏障组件的交互。由此进一步减轻了驾驶员的负担。
13.此外,本发明可以包括计算机程序产品、控制单元和具有这种控制单元的机动车辆。
附图说明
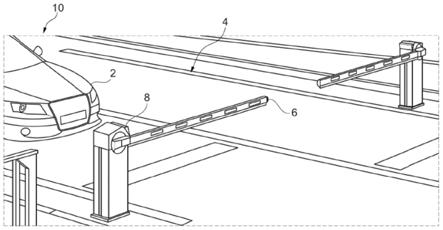
14.图1以示意图的形式示出了接近屏障组件的机动车辆;
15.图2以示意图的形式示出了图1所示的机动车辆的部件;以及
16.图3示出了图1所示的机动车辆的操作的流程图。
具体实施方式
17.在图1中,呈现了这样一种场景:机动车辆2接近屏障组件4的屏障6。
18.通过机动车辆2和/或机动车辆2的驾驶员10与用于打开屏障6的开启装置8之间的交互,可以打开屏障6,使得机动车辆2将获得访问访问受限的区域(例如停车位或停车场,或收费路段)的权限。
19.在本实施例中,机动车辆2是轿车。然而,机动车辆也可以是另一种类型的机动车辆2,例如卡车。
20.机动车辆2可以具有一个或多个驾驶辅助系统或者可以是自动驾驶机动车辆2的形式。
21.高级驾驶员辅助系统(advanced driver assistance systems,adas)是机动车辆2中的辅助电子设备,用于在某些驾驶情况下辅助驾驶员10。安全方面通常是主要关注点,但adas也可以提高驾驶舒适度。这种驾驶员辅助系统读取和评估来自环境传感器的环境数据记录。
22.自动驾驶机动车辆2(有时也称为自主陆地车辆)是指可以在没有人类驾驶员干预的情况下驾驶、控制和停放的汽车或其他机动车辆。在不需要驾驶员10手动控制的情况下,也使用术语机器人汽车。然后驾驶座可以保持空置;方向盘、制动器和油门踏板可能不存在。
23.自动驾驶车辆2还可以使用各种环境传感器来检测其周围环境,并从获得的环境数据记录中确定自己和其他道路使用者的位置。自动驾驶车辆2可以与导航软件配合以导
航到驾驶目的地并避免沿途发生碰撞。
24.因此,在本示例性实施例中,机动车辆2至少满足根据sae j3016的sae自主级别1。然而,机动车辆2也可以是根据sae j3016中的sae自主级别2至5之一的机动车辆2。
25.通过屏障组件4似乎没有问题,但可能经常需要来自机动车辆2的驾驶员10的许多动作。
26.在这种情况下,为了减轻驾驶员10的负担,机动车辆2具有图2所示的部件,其被设计为半自主或完全自主的,例如用于辅助驾驶员10或用于在无需驾驶员干预的情况下通过屏障组件4。
27.为此,机动车辆2和/或图2所示的部件具有用于下述任务和/或功能的硬件和/或软件部件。
28.所示部件是屏障检测模块12、环境传感器14、车辆监控模块16、轨迹规划模块18、车辆控制模块20、交互模块22、hmi 24和控制单元26。
29.屏障检测模块12被设计用于检测与机动车辆2的路径重合的屏障组件4并且提供停止位置记录sds。检测可以基于驾驶员10的手动输入(例如通过hmi 24),和/或基于机动车辆2的导航数据(gps(global position system,全球定位系统)和地图数据),和/或基于机动车辆2的规划路线。检测还可以替代地或附加地基于对环境数据记录uds的评估,环境数据记录uds由机动车辆2的环境传感器14提供。
30.环境传感器14被设计成监测车辆2前方的交通,特别是与最前面(即,领头)物体或道路使用者之间的距离以及最前面物体的速度。环境传感器14可以是例如雷达、lidar(light detection and ranging,光检测与测距)、超声波传感器或摄像机系统。车对外界(vehicle-to-everything,v2x)系统还可以提供环境数据记录uds。v2x系统可能包括车对车(vehicle-to-vehicle,v2v)、车对路(vehicle-to-road,v2r)、车对基础设施(vehicle-to-infrastructure,v2i)、车对网络(vehicle-to-network,v2n)以及车对人(vehicle-to-person,v2p)通信。
31.车辆监控模块16被配备成监测机动车辆2的状况,例如其里程计、速度、行驶距离和/或横摆角/转向角,并且提供操作数据记录bds。这可以借助于车辆上的传感器和/或经由机动车辆2的控制单元和/或can(controller area network,控制器局域网)总线信号提供的信息来实现。此外,可以通过卡尔曼滤波器来进行状态评估。
32.轨迹规划模块18被设计成确定从机动车辆2的当前位置到与门或屏障相关的特定停止位置的轨迹数据记录tds。
33.为此,轨迹规划模块18被设计成检测屏障组件4或读取屏障检测模块12的数据。
34.此外,轨迹规划模块18被设计成确定检测到的屏障组件2的位置或指示检测到的屏障组件2的位置的位置数据。这可以是停止位置,例如屏障6前方1米处。
35.此外,轨迹规划模块18被设计成基于当前位置和特定停止位置确定相应的轨迹或轨迹数据记录tds并且以轨迹数据记录tds的形式提供相应的轨迹。为此目的,可以结合机动车辆2的导航系统。
36.车辆控制模块20被设计成控制机动车辆2的纵向运动(燃料、制动、变速器)和横向运动。此外,车辆控制模块20被设计成基于轨迹数据记录tds确定控制数据记录ads,控制数据记录ads包括例如车辆速度和转向设定点的值,例如发动机和转向干预的控制信号。为
此,可以结合其他驾驶辅助系统,例如泊车助手、交通拥堵助手或巡航控制器。
37.交互模块22被设计成支持机动车辆2和/或驾驶员10与屏障组件4的交互,其在必要时被激活。交互模块22提供交互数据记录ids。
38.例如,交互模块22可以使机动车辆2的驾驶员侧的侧车窗打开和稍后关闭,因为打开侧车窗允许驾驶员10在终端执行动作(例如接收卡片)、执行付款流程或甚至说话。
39.此外,交互模块22可以激活使用信用卡并且在机动车辆2中实现的自动支付系统。此外,交互模块22还可以与车库门开启器系统交互。最后,交互模块22还可以与车辆识别系统交互。
40.hmi 24(human machine interface,“人机界面”)被设计成允许驾驶员10键入输入并接收反馈和通知。hmi 24提供输入和输出数据记录ead并且可以被设计成输出声学和/或光学和/或触觉信号。此外,hmi 24可以被设计成用于语音控制或可以为驾驶员10提供按钮。
41.控制单元26对于方法的控制是必不可少的,并且协调所提到的其他部件之间的交互和数据交换。
42.现在额外参考图3解释过程。起点是机动车辆2以及驾驶员10最初以特定速度沿着预定路线移动。路线可以存储在机动车辆2的导航系统中。驾驶辅助系统可以是激活的,其全部或部分地控制机动车辆2。如有必要,可以超驰该驾驶辅助系统。
43.在第一步骤s100中,从机动车辆2的环境传感器14读取环境数据记录uds。
44.在另一步骤s200中,屏障检测模块12对环境数据记录uds进行评估以确定是否接近屏障模块4。例如,监测和评估行进方向上的1000米。结果由屏障检测模块12以停止数据记录sds的形式提供。此外,屏障组件4也可以由驾驶员10启动。
45.在另一步骤s300中,激活轨迹规划模块18。轨迹规划模块18确定轨迹数据记录tds,尤其是在检测到的屏障组件4处使机动车辆2停车的纵向方向上和另外在横向方向上的设定点。
46.在另一步骤s400中,车辆控制模块20确定根据轨迹数据记录tds控制机动车辆2从车辆2的当前位置到特定停止位置的控制数据记录ads。为此,考虑车辆控制模块20的纵向和横向引导设定点以及车辆监控模块16提供的实际值。生成的控制数据记录ads可以由自主车辆控制器用于自主或半自主驾驶,或者可以提供给人类驾驶员以进行指导(例如,通过hmi)。
47.在步骤s500中,激活交互模块22并提供交互数据记录ids,例如用于打开车辆2的驾驶员侧的侧车窗。
48.如果机动车辆2位于屏障6的正前方,例如距离屏障6一米处,则该方法继续进行另一步骤s600。还可以提供,交互模块22自动(即在没有驾驶员干预的情况下)处理与屏障模块4的交互,例如无现金支付过程。在这种情况下,机动车辆2可以不完全停止而是以降低的速度通过屏障组件4。
49.在另一步骤s600中,机动车辆在屏障组件4前方停止或减速。现在驾驶员10可以执行所需的交互,例如通过打开的侧车窗。此外,hmi 24可以根据输入和输出数据记录ead要求驾驶员执行所需的交互,例如通过声学和/或光学和/或触觉信号。
50.此外,可以控制机动车辆2的启停系统,以便在交互过程中自动停止机动车辆2的
内燃发动机,从而节省燃料。
51.在另一步骤s700中,驾驶员10现在执行与屏障组件4的交互。
52.在另一步骤s800中,屏障组件4的开启装置8使屏障6打开。
53.然后,在另一步骤900中,机动车辆2通过屏障6。
54.在到达距离屏障组件的预定最小距离之后或在预定时间段期满或超过预定最小速度之后,该方法在另一步骤s1000中返回到第一步骤s100。
55.在与本示例性实施例不同的实施例中,步骤的顺序也可以不同。此外,还可以同时或同一时间进行多个步骤。此外,在与本示例性实施例不同的实施例中,可以跳过或省略各个步骤。
56.由此可以在通过这样的屏障组件4时减轻驾驶员10的负担。