1.本发明涉及一种扫拖一体机器人及其使用控制方法。
背景技术:
2.随着经济发展,智能清洁机器人在家庭的普及率越来越高。而其中扫拖一体机器人由于强大的清洁能力更是伸手消费者喜爱。扫拖一体机器人能在完成扫地的同时进行拖地,大大提升了清洁效率。但是目前扫拖一体机器人在拖地时极易在地板、瓷砖等表面残留水渍,残留水渍长时间不蒸发会对地板和瓷砖等有损害,而水渍蒸干后遗留的水渍痕迹又影响美观。
3.为了解决上述问题,公布号为cn 107692931 a(申请号为cn201710821801.8)的中国专利公开了一种家用扫地机,包括底座、水箱和吸杂箱,底座下方设有喷淋头、刷毛、吸尘管、拖布和出风管道,通过喷淋头对地面进行喷水,通过刷毛将杂物扫起,通过吸尘管将灰尘和杂物吸附到吸杂箱内,通过静电吸尘板吸附过滤,在通过拖地布对地面擦洗,然后通过出风管道将地面吹干。然而该结构中,出风管道位置固定,出风管道的出风口与地面之间的角度也是固定的。然而,对于瓷砖地面和木质地板地面而言,其形态差异较大,木质地板容易吸水,而瓷砖地面吸水性较差,该结构中出风口的角度不能根据被清扫地面的实际情况进行调节,因此有待于进一步改进。
技术实现要素:
4.本发明所要解决的第一个技术问题是针对上述现有技术提供一种能根据被清洁地面材质改变吹风角度或/和面积的扫拖一体机器人。
5.本发明所要解决的第二个技术问题是针对上述现有技术提供一种能根据被清洁地面材质改变吹风角度或/和面积的扫拖一体机器人的工作控制方法。
6.本发明解决上述第一个技术问题所采用的技术方案为:一种扫拖一体机器人,包括机体,机体的下部设有位于前进方向前侧的吸尘组件和位于吸尘组件后方的拖地组件,所述机体上设有能对被清洁地面进行吹风的吹风组件,其特征在于:所述机体上还设有与所述吹风组件配合的、能改变吹向被清洁地面的吹风角度或/和吹风面积的风调节组件。
7.作为改进,所述吹风组件包括风机组件,以及具有入口和出口的出风管道,出风管道的入口与风机组件出风口连通,出风管道的出口水平设置或倾斜向下设置;所述风调节组件包括设置在出风管道的出口处的挡板及与挡板连接的用于驱动挡板转动的风向调节电机,吹风组件吹出的风自出风管道的出口吹出,经由挡板换向后吹向被清洁地面,挡板能在风向调节电机驱动下转动,从而改变吹向被清洁地面的吹风的角度和面积。
8.另外,所述出风管道的出口也可以倾斜向下设置或竖直向下设置,此时,所风调节组件包括设置在出风管道的出口处的挡板及与挡板连接的用于驱动挡板移动的风向调节电机,而挡板能在风向调节电机驱动下移动,从而改变出风管道的出口面积,进而改变吹向被清洁地面的吹风面积。
9.再改进,所述吸尘组件包括设置在机体的下部位于前进方向前侧的第一吸尘口,和位于第一吸尘口后方的第二吸尘口,第二吸尘口内设有滚刷组件;机体内设有尘盒,尘盒上设有进风口和出风口,第一吸尘口通过第一通道与尘盒的进风口连通,第二吸尘口通过第二通道与尘盒的进风口连通,所述风机组件的进风口与尘盒的出风口连通。该吸尘组件设置两个吸口,使得扫拖一体机器人在清洁地面的时候,毛发能够首先被位于前侧的第一吸口吸走,而剩余的尘屑则能够被位于后侧的第二吸尘口内部的滚刷组件扬起,便于第二吸口将剩余的尘屑吸走。如此设计,使得具有地刷组件的扫地机器人在避免头发缠绕滚刷的同时又不降低其除尘能力。
10.再改进,所述尘盒内设有尘盒隔板,尘盒隔板将尘盒内部的空间划为第一收集空间和第二收集空间,尘盒上的进风口包括与第一收集空间连通的第一进风口以及与第二收集空间连通的第二进风口,尘盒上的出风口包括与第一收集空间连通的第一出风口以及与第二收集空间连通的第二出风口,第一吸尘口通过第一通道与尘盒的第一进风口连通,第二吸尘口通过第一通道与尘盒的第二进风口连通。尘盒隔板将尘盒分成独立的两个空间,这种设计可以将灰尘、毛发等轻量物质吸入第一收集空间,将饭粒、果壳等大颗粒、及重物吸入第二收集空间,从而解决小大颗粒、毛发同时混合在一个空间造成尘盒空间利用率不高以及滤网易堵塞(小颗粒易填充大颗粒之间的缝隙)的现象。
11.再改进,第一出风口和第二出风口处均设有滤网。
12.再改进,所述第一吸尘口的宽度大于第二吸尘口的宽度,可更好将毛发灰尘通过第一吸尘口吸入第一收集空间。
13.再改进,所述机体底还设有能对吹风组件吹出的风进行加热的发热源,通过发热源将吹风组件吹出的风进行加热,可更好地将地面上的水渍进行风干。
14.再改进,所述吹风组件包括风机组件,以及具有入口和出口的出风管道,所述发热源设置在出风管道内部,也可以设置在出风管道外部,且紧贴出风管道。此时,可将出风管道的部分弯折呈u型,将发热源设置在出风管道的u型部位内部,将发热源仅仅包裹住。
15.发热源可以另外单独设置,如发热管或发热丝,但是为了节省成本,一般机体底部会设有滚轮,机体内部会设有用于驱动滚轮转动的行走马达;而拖地组件一般会包括拖布,及能驱动拖布往复移动或驱动两块拖布旋转的拖地马达,行走马达或拖地马达在工作时会产生较大的热量,本发明可以充分利用行走马达或拖地马达工作时产生的热量,将行走马达或拖地马达作为所述发热源,不需要额外增加其他发热源了,即节省了成本,又充分利用能源,同时还能对行走马达或拖地马达进行降温。
16.再改进,所述机体下方位于拖地组件的后方设有刮板,可将水渍产生的痕迹刮除。
17.再改进,本发明还包括用于识别扫拖一体机器人当前所处地面环境的地面识别模块,该地面识别模块与风调节组件连接。
18.本发明解决上述第二个技术问题所采用的技术方案为:一种具有上述结构的扫拖一体机器人的工作控制方法,其特征在于:
19.扫拖一体机器人中预设有清扫环境与清扫参数对应表,清扫环境与清扫参数对应表中保存有n类不同清扫环境,以及分别与n类不同清扫环境对应的清扫参数,该清扫参数包括吹向被清洁地面的吹风角度或/和吹风面积,n为大于等于2的自然数;扫拖一体机器人在工作过程中,地面识别模块实时监控并识别扫拖一体机器人当前所处地面环境是预设n
类环境中的哪一类清扫环境,并根据识别的清扫环境,查找清扫参数对应表中与该清扫环境对应的清扫参数,然后风调节组件根据查出的清扫参数,调节吹向被清洁地面的吹风角度或/和吹风面积。。
20.所述吹风组件包括风机组件,以及具有入口和出口的出风管道,出风管道的入口与风机组件出风口连通的出风管道,出风管道的出口水平设置;所述风调节组件包括设置在出风管道的出口处的挡板及与挡板连接的用于驱动挡板转动的风向调节电机,挡板转动位置设置在出风管道的出口上方,吹风组件吹出的风自出风管道的出口吹出,经由挡板换向后吹向被清洁地面,挡板能在风向调节电机驱动下转动,从而改变吹向被清洁地面的吹风角度和吹风面积;
21.当地面识别模块识别到扫拖一体机器人当前所处地面环境是第一类清扫环境时,风向调节电机驱动挡板转动,使挡板延长线与地面之间的夹角为10度-50度;当地面识别模块识别到扫拖一体机器人当前所处地面环境是第二类清扫环境时,风向调节电机驱动挡板转动,使挡板延长线与地面之间的夹角为30度-80度;此时吹风面积大于被清洁地面为地板时的吹风面积;其中第一类清扫环境包括实木地板、复合地板、竹地板及软木地板;第二类清扫环境包括地砖、瓷砖、橡胶面。
22.所述风机组件具有强风挡和弱风档两个工作档位,当地面识别模块识别到扫拖一体机器人当前所处地面环境是第一类清扫环境时,所述风机组件工作在强风挡,当地面识别模块识别到扫拖一体机器人当前所处地面环境是第二类清扫环境时,所述风机组件工作在弱风挡;第一类清扫环境包括实木地板、复合地板、竹地板及软木地板;第二类清扫环境包括地砖、瓷砖、橡胶面
23.与现有技术相比,本发明的优点在于:通过设置与所述吹风组件配合的、能改变吹向被清洁地面的吹风的角度或/和面积的风调节组件,使得本发明提供的扫拖一体机器人能根据被清洁地面材质改变吹风角度或/和吹风面积的扫拖一体机器人,从而更好适应不同工作环境,保证更好的清洁效果。
附图说明
24.图1为本发明实施例中扫拖一体机器人的立体结构示意图(从底部视角向上看)。
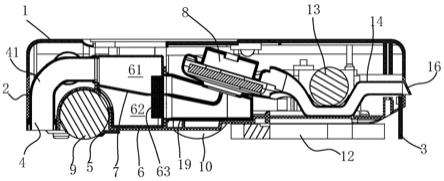
25.图2为本发明实施例中扫拖一体机器人的剖视图。
26.图3为本发明实施例中扫拖一体机器人的立体分解图。
27.图4为本发明实施例中出风管道、行走马达、发热源另一种实现方式结构示意图。
28.图5为本发明实施例中扫拖一体机器人下壳、出风管道及风调节组件结构示意图。
具体实施方式
29.以下结合附图实施例对本发明做详细描述。
30.如图1、2、3所示的扫拖一体机器人,包括上壳1和下壳2组合而成的机体,下壳2的下部设有位于前进方向前侧的吸尘组件和位于吸尘组件后方的拖地组件,设置在吸尘组件和拖地组件之间的行走机构,位于拖地组件的后方设有刮板3,机体上设有能对被清洁地面进行吹风的吹风组件,机体上还设有与所述吹风组件配合的、能改变吹向被清洁地面的吹风的角度或/和面积的风调节组件。
31.本实施例中,所述吸尘组件包括设置在机体的下部位于前进方向前侧的第一吸尘口4和位于第一吸尘口后方的第二吸尘口5,设置在机体内的尘盒6,尘盒6内设有尘盒隔板7,尘盒隔板7将尘盒6内部的空间划为第一收集空间61和第二收集空间62,第一吸尘口4通过第一通道41与尘盒的第一收集空间连通,第二吸尘口5通过第二通道与尘盒上的第二收集空间连通。所述尘盒6上设有进风口和出风口,该进风口包括与第一收集空间连通的第一进风口以及与第二收集空间连通的第二进风口,尘盒上的出风口包括与第一收集空间连通的第一出风口以及与第二收集空间连通的第二出风口,第一吸尘口4通过第一通道41与尘盒的第一进风口连通,第二吸尘口5通过第二通道与尘盒的第二进风口连通;第一出风口和第二出风口处均设有滤网63。所述第一吸尘口4的宽度大于第二吸尘口5的宽度,所述第二吸尘口5内设有滚刷组件9。
32.所述行走机构包括安装在下壳上的两个用于行走的滚轮10,机体内固定有设有用于驱动滚轮转动的行走马达11。
33.所述拖地组件包括两块拖布12,及能分别驱动两块拖布12往复移动或驱动两块拖布12旋转的拖地马达13。
34.所述吹风组件包括风机组件8,以及具有入口和出口的出风管道14。风机组件8位于尘盒6的后方,风机组件8的进风口通过内部设有隔板的风盒19与尘盒6的出风口连通。出风管道14的入口与风机组件8出风口连通,出风管道14的出口水平设置,当然根据实际需要,出风管道14的出口也可以倾斜向下设置或竖直向下设置。机体内设有能对风机组件8吹出的风进行加热的发热源。发热源可以直接利用行走马达11或拖地马达13,也可以另外单独设置发热管,发热源可以设置在出风管道内部,也可以设置在出风管道14外部。本实施例中,出风管道14中部弯折呈u型,发热源直接利用拖地马达13,拖地马达13被出风管道的u型部位包裹;参见图2所示;另外,也可以在出风管道14内部再设置体积较小的发热管15,以提高发热效率,参见图4所示。
35.所述风调节组件包括设置在出风管道14的出口处的挡板16及与挡板连接的用于驱动挡板转动的风向调节电机17,吹风组件吹出的风自出风管道的出口吹出,经由挡板16换向后吹向被清洁地面,挡板16能在风向调节电机17下转动,从而改变吹向被清洁地面的吹风角度和吹风面积,参见图3和图5。
36.机体上还设有包括用于识别扫拖一体机器人当前所处地面环境的地面识别模块18,该地面识别模块18与风调节组件连接。地面识别模块18采用图像采集识别模块。
37.上述扫拖一体机器人的工作控制方法为:扫拖一体机器人中预设有清扫环境与清扫参数对应表,清扫环境与清扫参数对应表中保存有n类不同清扫环境,以及分别与n类不同清扫环境对应的清扫参数,该清扫参数包括吹向被清洁地面的吹风角度或/和吹风面积,n为大于等于2的自然数;扫拖一体机器人在工作过程中,地面识别模块实时监控并识别扫拖一体机器人当前所处地面环境是预设n类环境中的哪一类清扫环境,并根据识别的清扫环境,查找清扫参数对应表中与该清扫环境对应的清扫参数,然后风调节组件根据查出的清扫参数,调节吹向被清洁地面的吹风角度或/和吹风面积。
38.根据实际情况,当n=2时,第一类清扫环境包括实木地板、复合地板、竹地板及软木地板;第二类清扫环境包括地砖、瓷砖、橡胶面;扫拖一体机器人在工作过程中,地面识别模块实时监控并识别扫拖一体机器人当前所处地面环境是第一类清扫环境还是第二类清
扫环境,当地面识别模块识别到扫拖一体机器人当前所处地面环境是第一类清扫环境时,风向调节电机17驱动挡板16转动,使挡板延长线与地面之间的夹角为10度-50度,优选20度;当地面识别模块识别到扫拖一体机器人当前所处地面环境是第二类清扫环境时,风向调节电机驱动挡板转动,使挡板延长线与地面之间的夹角为35度-80度,优选45~60度。而风机组件具有强风挡和弱风档两个工作档位,当地面识别模块识别到扫拖一体机器人当前所处地面环境是第一类环境时,所述风机工作在强风挡,当地面识别模块识别到扫拖一体机器人当前所处地面环境是第二类清扫环境时,所述风机工作在弱风挡。因为当被清洁面是木地板时,因为木地板容易吸水,需要快速将底板吹干,此时挡板延长线与地面之间的夹角为20度,出风面积小,风速较快;而当被清洁面是瓷砖时,此时挡板延长线与地面之间的夹角为45度-60度,此处吹风面积较大,能将大面积范围内的瓷砖地面吹干。