1.本实用新型涉及智能家居领域,特别涉及一种无人驾驶洗地车。
背景技术:
2.环境卫生是影响生活质量的重要因素,因此,伴随着人们对生活质量要求的不断 提高,相应地对环境卫生的要求也越来越高,然而现代人们的工作压力与日俱增,急需从繁重的清洁工作中解救出来,于是出现了许多清洁地面的设备来改善环境卫生,常用的有吸尘器、自动拖布机以及洗地机。
3.现有的洗地机结构都比较单一,采用的通常都是半自动的形式进行工作的,在使用的过程中通常都需要安排一名操作员进行操作,这样在使用的时候会增加劳动成本,使用不方便。
技术实现要素:
4.本实用新型所要解决的技术问题在于提供一种结构简单、使用方便的无人驾驶洗地车。
5.为解决上述现有的技术问题,本实用新型采用如下方案:一种无人驾驶洗地车,包括车身、底盘、座椅、驱动电机、底座、支架以及控制面板,所述底盘安装在车身内,车身上安装有座椅,座椅一侧底部设有底座,底座上通过支架与控制面板连接,控制面板上安装有激光雷达,所述底盘一端通过后轮支架安装有后轮,底盘另一端通过防撞杆支架安装有防撞杆,两防撞杆支架之间设有驱舵机总成,驱舵机总成一侧设有驱舵电机,所述支架与防撞杆支架之间设有刷盘架,刷盘架底部设有若干刷盘,刷盘架上安装有刷盘升降电机,刷盘升降电机通过刷盘升降支架安装在后轮轴上,后轮轴安装在两后轮之间。
6.作为优选,所述控制面板上设有触摸显示屏,其中触摸显示屏左侧设有方向摇杆、功能按钮以及拨干,触摸显示屏右侧设有运行状态灯、紧急停止按钮以及总开关,所述控制面板上设有usb调试接口。
7.作为优选,所述底座上设有加速踏板。
8.作为优选,所述车身两侧均设有转向灯以及3d深度摄像头。
9.作为优选,所述底座两侧分别设有ac交流电充电口与dc直流充电口,底座前端设有单线雷达,单线雷达位于支架下方。
10.作为优选,所述车身背面设有放置槽,两放置槽上均放置有污水管,两放置槽之间设有吸水电机盖,吸水电机盖上方设有紧急停止按钮。
11.作为优选,所述车身底部一侧设有清水箱出水口,清水箱出水口一侧设有清水箱水位管。
12.作为优选,所述车身周边设有多个超声波防撞探测器。
13.作为优选,所述车身与底座之间设有通风盖板。
14.作为优选,所述后轮轴上安装有吸水电机支架,吸水电机支架上安装有吸水电机,
吸水电机底部设有刮水扒总成。
15.作为优选,所述车身上安装有led灯条,led灯条上方设有led警示顶灯。
16.有益效果:
17.本实用新型采用了上述技术方案提供一种无人驾驶洗地车,弥补了传统工艺结构方式上的不足,设计合理,操作方便。
附图说明
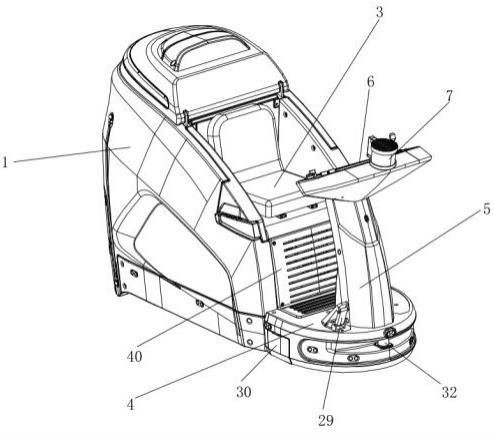
18.图1为本实用新型的结构示意图。
19.图2为本实用新型控制面板的结构示意图。
20.图3为本实用新型的侧面结构示意图。
21.图4为本实用新型的局部示意图。
22.图5为本实用新型刷盘架的局部示意图。
23.图6为本实用新型刷盘架的侧面示意图。
24.图7为本实用新型刮水扒总成的局部示意图。
25.图中,车身1、底盘2、座椅3、底座4、支架5、控制面板6、激光雷达7、后轮支架8、后轮9、防撞杆支架10、防撞杆11、驱舵机总成12、驱舵电机13、刷盘架14、刷盘15、刷盘升降电机16、刷盘升降支架17、后轮轴18、触摸显示屏19、方向摇杆20、功能按钮21、拨干22、运行状态灯23、紧急停止按钮24、总开关25、usb调试接口26、转向灯27、3d深度摄像头28、加速踏板29、ac交流电充电口30、dc直流充电口31、单线雷达32、放置槽33、污水管34、吸水电机盖35、后部紧急停止按钮36、清水箱出水口37、清水箱水位管38、超声波防撞探测器39、通风盖板40、吸水电机支架41、吸水电机42、刮水扒总成43、led灯条44、led警示顶灯45。
具体实施方式
26.如图1至7所示,一种无人驾驶洗地车,包括车身1、底盘2、座椅3、底座4、支架5以及控制面板6,所述底盘2安装在车身1内,车身1上安装有座椅3,座椅3一侧底部设有底座4,底座4上通过支架5与控制面板6连接,控制面板6上安装有激光雷达7,所述底盘2一端通过后轮支架8安装有后轮9,底盘2另一端通过防撞杆支架10安装有防撞杆11,两防撞杆支架10之间设有驱舵机总成12,驱舵机总成12一侧设有驱舵电机13,所述后轮支架8与防撞杆支架10之间设有刷盘架14,刷盘架14底部设有若干刷盘15,刷盘架14上安装有刷盘升降电机16,刷盘升降电机16通过刷盘升降支架17安装在后轮轴18上,后轮轴18安装在两后轮9之间,所述控制面板6上设有触摸显示屏19,其中触摸显示屏19左侧设有方向摇杆20、功能按钮21以及拨干22,触摸显示屏19右侧设有运行状态灯23、紧急停止按钮24以及总开关25,所述控制面板6上设有usb调试接口26,所述车身1两侧均设有转向灯27以及3d深度摄像头28,所述底座4上设有加速踏板29,底座4两侧分别设有ac交流电充电口30与dc直流充电口31,底座4前端设有单线雷达32,单线雷达32位于支架5下方,所述车身1背面设有放置槽33,两放置槽33上均放置有污水管34,两放置槽33之间设有吸水电机盖35,吸水电机盖35上方设有紧急停止按钮36,所述车身1底部一侧设有清水箱出水口37,清水箱出水口37一侧设有清水箱水位管38,所述车身1周边设有多个超声波防撞探测器39,所述车身1与底座4之间设有通风盖板40,所述后轮轴18上安装有吸水电机支架41,吸水电机支架41上安装有吸水电机42,吸水电
机42底部设有刮水扒总成43,所述车身1上安装有led灯条44,led灯条44上方设有led警示顶灯45。
27.实际工作时,该洗地车分为两种驾驶模式,即:手动驾驶与无人自动驾驶,当采用的是手动驾驶模式时,驾驶员坐在座椅3上,按下总开关25,在驱舵电机13与后轮9的驱动下带动车身进行移动,通过方向摇杆20与各功能按钮21可以操控车辆行驶,在车身1底部一侧设有清水箱出水口37,通过清水箱出水口37可以将清水箱中的清水给排放出来,便于对地面进行清洗,在清水箱出水口37一侧设有清水箱水位管38,可以方便的对清水箱内的水量进行观测,便于对清水箱内的清水进行及时添加,在洗地车行驶的过程中,刷盘升降电机16可以驱动刷盘15进行上下升降,然后通过刷盘15对地面进行清洗,清洗完之后,可以通过刮水扒总成43对地面上的污水进行收集,然后通过吸水电机42将污水给吸入到洗地车的污水箱处,等清洗完成后,将洗地车行驶至指定地方,通过污水管34对污水进行排放。
28.当采用的是无人自动驾驶的模式时,原理跟手动驾驶类似,在手动驾驶的基础上,增加了usb调试接口26,可以将预设好的程序通过usb调试接口26输入到控制面板6上,在驱舵电机13与后轮9的驱动下带动车身1进行移动,在控制面板6上安装有激光雷达7,通过激光雷达7可以全方位探测车辆行驶中的前方障碍物,在车身1的两侧设有转向灯27与3d深度摄像头28,通过3d深度摄像头28可以检测车体左右两侧的障碍物距离以及高度,检测完之后将其通过控制面板6进行反馈,当车辆在转弯的过程中,通过转向灯27可以发出转弯的信号,起到警示的效果,另外在车身1的周边设有多个超声波防撞探测器39,通过超声波防撞探测器39可以检测车体离障碍物距离防止碰撞,可以有效的对地面进行清洗,使用更加方便。
29.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明,本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。